Anda mungkin juga menyukai
- Resumen EjecutivoDokumen14 halamanResumen EjecutivoRigoberto CuellarBelum ada peringkat
- Trafos ZigzagDokumen29 halamanTrafos ZigzagLeo Le GrisBelum ada peringkat
- Tierra Adentro 25Dokumen40 halamanTierra Adentro 25Rigoberto CuellarBelum ada peringkat
- Manual de Vermicompostaje GRAMADokumen16 halamanManual de Vermicompostaje GRAMAEduardo Garrera100% (1)
- Lógica Secuencial Registros de Desplazamiento y ContadoresDokumen18 halamanLógica Secuencial Registros de Desplazamiento y ContadoresEdy MirandaBelum ada peringkat
- Opinion DR Horacio Torres Sobre Sistemas DAS de LECDokumen3 halamanOpinion DR Horacio Torres Sobre Sistemas DAS de LECsisprointBelum ada peringkat
- Hoja 03 Secciones y Elevaciones 2 PDFDokumen1 halamanHoja 03 Secciones y Elevaciones 2 PDFRigoberto CuellarBelum ada peringkat
- Sintesis TGSPR PDFDokumen3 halamanSintesis TGSPR PDFRigoberto CuellarBelum ada peringkat
- Hoja 02 Secciones y Elevaciones 1Dokumen1 halamanHoja 02 Secciones y Elevaciones 1Rigoberto CuellarBelum ada peringkat
- 2001.10 Se Cuestiona La Eficacia de Los PararrayosDokumen2 halaman2001.10 Se Cuestiona La Eficacia de Los PararrayosRigoberto CuellarBelum ada peringkat
- Hoja 01 Conjunto y Plantas Arquitectónicas PDFDokumen1 halamanHoja 01 Conjunto y Plantas Arquitectónicas PDFRigoberto CuellarBelum ada peringkat
- Manual Tricoptero P3CDokumen19 halamanManual Tricoptero P3CRigoberto CuellarBelum ada peringkat
- Hoja 04 Plantas Acabados y Eléctricas PDFDokumen1 halamanHoja 04 Plantas Acabados y Eléctricas PDFRigoberto CuellarBelum ada peringkat
- Cap IV PropuestaDokumen31 halamanCap IV PropuestaRigoberto CuellarBelum ada peringkat
- 2000.07 Horacio Torres - Eficacia ESEDokumen8 halaman2000.07 Horacio Torres - Eficacia ESERigoberto CuellarBelum ada peringkat
- 2000.07 Horacio Torres - Eficacia ESEDokumen8 halaman2000.07 Horacio Torres - Eficacia ESERigoberto CuellarBelum ada peringkat
- Activacion Por Voz Via LaserDokumen15 halamanActivacion Por Voz Via LaserRigoberto CuellarBelum ada peringkat
- Helicoptero Radio Control 04 ING ITE PIT EDokumen20 halamanHelicoptero Radio Control 04 ING ITE PIT EsevicoBelum ada peringkat
- Como Construir Nuestro Propio Radio Control PDFDokumen43 halamanComo Construir Nuestro Propio Radio Control PDFjosesbbBelum ada peringkat
- Capitulo 5Dokumen6 halamanCapitulo 5Rigoberto CuellarBelum ada peringkat
- Brazo RoboticoDokumen42 halamanBrazo RoboticoSho HaiBelum ada peringkat
- Contadores y RegistrosDokumen30 halamanContadores y RegistrosDavid Felipe BajoneroBelum ada peringkat
- Cuadracoptero SW (Cap 4)Dokumen24 halamanCuadracoptero SW (Cap 4)mars1972Belum ada peringkat
- Capitulo 3Dokumen9 halamanCapitulo 3Rigoberto CuellarBelum ada peringkat
- Helices H DDokumen12 halamanHelices H DRigoberto CuellarBelum ada peringkat
- Apuntes Diseño de HelicopterosDokumen84 halamanApuntes Diseño de Helicopterosmac_08Belum ada peringkat
- Convertidores de FrecuenciaDokumen22 halamanConvertidores de FrecuenciaRigoberto CuellarBelum ada peringkat
- Lineamientos Técnicos para La Prevención y Control de La Fiebre Chikungunya PDFDokumen49 halamanLineamientos Técnicos para La Prevención y Control de La Fiebre Chikungunya PDFJos_RobBelum ada peringkat
- Limitaciones de Altura y Distancia Vlos Evlos BvlosDokumen6 halamanLimitaciones de Altura y Distancia Vlos Evlos Bvlosvictor martinBelum ada peringkat
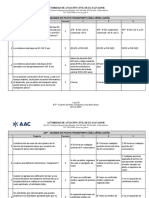
- Atp - Examen de Piloto Transporte Línea Aérea Avión: Autoridad de Aviación Civil de El SalvadorDokumen218 halamanAtp - Examen de Piloto Transporte Línea Aérea Avión: Autoridad de Aviación Civil de El SalvadorMatteoBelum ada peringkat
- Como Elegir MotorDokumen1 halamanComo Elegir MotorUruguay ParapenteBelum ada peringkat
- Ejercicio W&B (Centro de Gravedad Cessna T303 POH)Dokumen2 halamanEjercicio W&B (Centro de Gravedad Cessna T303 POH)HetskuniBelum ada peringkat
- Examen de Entrenamiento Módulo 1 - Piloto de Rpas (Drone) C14Dokumen16 halamanExamen de Entrenamiento Módulo 1 - Piloto de Rpas (Drone) C14tecelecBelum ada peringkat
- TCASDokumen3 halamanTCASJuan Ali RojasBelum ada peringkat
- Copia Traducida de Caso - 2 - Boeing - 737 - MaxDokumen22 halamanCopia Traducida de Caso - 2 - Boeing - 737 - MaxMarcos Abaud100% (1)
- Vuelo 11 de Avianca PONGADokumen10 halamanVuelo 11 de Avianca PONGALuis Ramirez100% (1)
- PPE PL 20150120 162103 Boletin Aviacion PrintDokumen16 halamanPPE PL 20150120 162103 Boletin Aviacion PrintsimdepBelum ada peringkat
- Tiquete Aereo Nicolas QuinteroDokumen2 halamanTiquete Aereo Nicolas QuinteroandreaBelum ada peringkat
- Unidad 2 Tipos y Clasificación de Las AeronavesDokumen14 halamanUnidad 2 Tipos y Clasificación de Las AeronavesDaniela LeónBelum ada peringkat
- Caballero Aguila Historia de AeromexicoDokumen201 halamanCaballero Aguila Historia de AeromexicoAviation LibraryBelum ada peringkat
- Proceso de Reclutamiento y SelecciónDokumen6 halamanProceso de Reclutamiento y SelecciónangelBelum ada peringkat
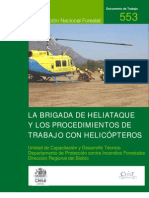
- La Brigada de Heliataque y Los Procedimientos Con HelicopterosDokumen52 halamanLa Brigada de Heliataque y Los Procedimientos Con HelicopterosFG Summer100% (1)
- SLVRDokumen28 halamanSLVRyolo xDxDBelum ada peringkat
- A310-A380-Modelos-AirbusDokumen3 halamanA310-A380-Modelos-AirbusandreaBelum ada peringkat
- Aviación ecuatoriana: historia, autoridades y proyectos actualesDokumen4 halamanAviación ecuatoriana: historia, autoridades y proyectos actualeszufuru93Belum ada peringkat
- PND y análisis dimensional en aviones SU-25 y T-27Dokumen34 halamanPND y análisis dimensional en aviones SU-25 y T-27Rodolfo LoayzaBelum ada peringkat
- Trafico AereoDokumen21 halamanTrafico AereoUlises ValerioBelum ada peringkat
- UNIDAD #I FACTOR DE CARGA DIAGRAMA V-N Parte 1 PresentaciónDokumen24 halamanUNIDAD #I FACTOR DE CARGA DIAGRAMA V-N Parte 1 PresentaciónGaro MartinezBelum ada peringkat
- AIM-7 SparrowDokumen17 halamanAIM-7 SparrowBelén Ochoa de Olza SolerBelum ada peringkat
- Ordenes Especificas de ProducciónDokumen6 halamanOrdenes Especificas de ProducciónEstefany AndersonBelum ada peringkat
- Aleron Control TabDokumen12 halamanAleron Control TabElkin Gonzalez DBelum ada peringkat
- Cristian Camilo Rodriguez GordilloDokumen12 halamanCristian Camilo Rodriguez GordilloGabriel FernandezBelum ada peringkat
- 18A Alejandro Mussa Dueñas Tesis 085Dokumen137 halaman18A Alejandro Mussa Dueñas Tesis 085Jehova Villa MartinezBelum ada peringkat
- Delicuencia OrganizadaDokumen1 halamanDelicuencia OrganizadalucinaBelum ada peringkat
- Reglamentación de Drones o RPAS en ColombiaDokumen3 halamanReglamentación de Drones o RPAS en ColombiaJulian Serna PastranaBelum ada peringkat
- Anexo 6 Parte 1 Cap 8 Al 13Dokumen49 halamanAnexo 6 Parte 1 Cap 8 Al 13NoyerHABelum ada peringkat
- Avion Embraer 190Dokumen3 halamanAvion Embraer 190Marco Antonio Laura Chura100% (1)