Anda mungkin juga menyukai
- Basic AC CircuitsDokumen45 halamanBasic AC CircuitszakikarimBelum ada peringkat
- Facts Worth Knowing About Frequency ConvertersDokumen167 halamanFacts Worth Knowing About Frequency ConvertersEduardo SuarezBelum ada peringkat
- Capacitance Voltage Transforme1Dokumen4 halamanCapacitance Voltage Transforme1ayushBelum ada peringkat
- Practical Switched Distance RelayDokumen37 halamanPractical Switched Distance RelayShahzad BhattiBelum ada peringkat
- Alfanar Co.: Respon Sibilities Legend CSDDokumen4 halamanAlfanar Co.: Respon Sibilities Legend CSDjayabalBelum ada peringkat
- A Case Study of FerroresonanceDokumen36 halamanA Case Study of Ferroresonancefreddy riveraBelum ada peringkat
- Effect Residual Magnetism On The Magnetic Core of A TransformerDokumen4 halamanEffect Residual Magnetism On The Magnetic Core of A Transformerhendro suprianto nugrohoBelum ada peringkat
- Power Systems Protection Course: Al-Balqa Applied UniversityDokumen37 halamanPower Systems Protection Course: Al-Balqa Applied Universityrodruren01Belum ada peringkat
- Knowledge is "Real Power": Introduction to Power QualityDari EverandKnowledge is "Real Power": Introduction to Power QualityBelum ada peringkat
- Field Service Hurco1990 1999 PDFDokumen491 halamanField Service Hurco1990 1999 PDFNestor German PissoniBelum ada peringkat
- Grounddistancerelays Residualcompensation PDFDokumen13 halamanGrounddistancerelays Residualcompensation PDFShahzadmbhattiBelum ada peringkat
- Abstract On DC Power Supply and BatteriesDokumen18 halamanAbstract On DC Power Supply and Batteriessamad_omidvar629250% (2)
- Reasons of Failures of CvtsDokumen5 halamanReasons of Failures of CvtsLalit Kumar JainBelum ada peringkat
- (Ebook - PDF - Programming) Visual Basic 6 Black BookDokumen1.113 halaman(Ebook - PDF - Programming) Visual Basic 6 Black BookshivajayBelum ada peringkat
- History Spring08Dokumen7 halamanHistory Spring08Anonymous 9VcxlFErfBelum ada peringkat
- Circuit Modelling Imon PscadDokumen9 halamanCircuit Modelling Imon PscadKishore DMBelum ada peringkat
- DCRMDokumen11 halamanDCRMgurdeepBelum ada peringkat
- Core Balance Current TransformersDokumen1 halamanCore Balance Current Transformersmspd2003100% (1)
- Communication Technologies Augmenting Power TransmissionDokumen54 halamanCommunication Technologies Augmenting Power TransmissionChaitanyaVigBelum ada peringkat
- Mason-The Art & Science of Protective Relaying (002-010)Dokumen9 halamanMason-The Art & Science of Protective Relaying (002-010)Marian ArjonaBelum ada peringkat
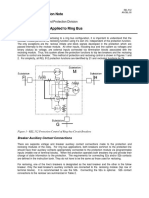
- Ring Bus Reclosing 20121217112215906Dokumen6 halamanRing Bus Reclosing 20121217112215906Rick JordanBelum ada peringkat
- Advanced Event Analysis Tutorial: Part 1: QuestionsDokumen5 halamanAdvanced Event Analysis Tutorial: Part 1: QuestionsDanilo Poma MuñozBelum ada peringkat
- Condition Monitoring of Instrument Transformers - POWERGRID ExperienceDokumen36 halamanCondition Monitoring of Instrument Transformers - POWERGRID ExperiencebcqbaoBelum ada peringkat
- Earth Fault RelayDokumen1 halamanEarth Fault RelayAliu AlaoBelum ada peringkat
- Chapter Four: Relay CoodinationDokumen25 halamanChapter Four: Relay Coodinationmuaz_aminu1422Belum ada peringkat
- Maintenance Handbook On Lightening ArresterDokumen42 halamanMaintenance Handbook On Lightening Arresterpruthiwiraj goudaBelum ada peringkat
- Electric CalDokumen20 halamanElectric CalRisky RiyanshBelum ada peringkat
- Department of Electrical and Electronics Engineering Question Bank Ee2402 Protection and SwitchgearDokumen16 halamanDepartment of Electrical and Electronics Engineering Question Bank Ee2402 Protection and SwitchgearSweqZBelum ada peringkat
- Line Current Differential Testing-A Practical ApproachDokumen10 halamanLine Current Differential Testing-A Practical ApproachmentongBelum ada peringkat
- CT Class Very ImportantDokumen6 halamanCT Class Very ImportantEngr Fahimuddin QureshiBelum ada peringkat
- A3 304Dokumen9 halamanA3 304carlos vidalBelum ada peringkat
- Current TransformersDokumen7 halamanCurrent Transformersmn_sundaraamBelum ada peringkat
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDari EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsBelum ada peringkat
- Transfor Feeder ProtectionDokumen26 halamanTransfor Feeder ProtectionCaptive MahbubBelum ada peringkat
- Red 670Dokumen47 halamanRed 670Hendra WeBelum ada peringkat
- Upptcl Training (Ee)Dokumen27 halamanUpptcl Training (Ee)AakashBelum ada peringkat
- Importance of X-R RatiosDokumen6 halamanImportance of X-R RatiosNayreth MezonesBelum ada peringkat
- KCGGDokumen12 halamanKCGGkrluckBelum ada peringkat
- CTreq forGErelays R6.9bookDokumen97 halamanCTreq forGErelays R6.9bookVíctor Casado100% (1)
- Internship Report: Noman DilberDokumen42 halamanInternship Report: Noman Dilberfarhan9125Belum ada peringkat
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsDari EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsBelum ada peringkat
- In The Name of The Most Beneficent & The Most Merciful: Radio and TV Antenna 1Dokumen42 halamanIn The Name of The Most Beneficent & The Most Merciful: Radio and TV Antenna 1Bhanu Prakash100% (1)
- Problems of Circuit InterruptionDokumen20 halamanProblems of Circuit Interruptioneeng812450% (2)
- Current Transformers - A Tester Survival GuideDokumen23 halamanCurrent Transformers - A Tester Survival GuideBalagopal R GuruvayurBelum ada peringkat
- Overall Understanding of Voltage Transformer 1683194716Dokumen4 halamanOverall Understanding of Voltage Transformer 1683194716rupali patilBelum ada peringkat
- ElectricalTester VirtualtestingDokumen27 halamanElectricalTester VirtualtestingShandukani VhulondoBelum ada peringkat
- 1431928880session II CBDokumen84 halaman1431928880session II CBAnonymous i2u3XW8UJHBelum ada peringkat
- Areva P443 Protection by Areva PaperDokumen6 halamanAreva P443 Protection by Areva PaperRajesh BoddunaBelum ada peringkat
- Tapcon Site ReportDokumen2 halamanTapcon Site Reportganeshapec8Belum ada peringkat
- Protection Systems Based On Rogowski SensorsDokumen6 halamanProtection Systems Based On Rogowski SensorsjulianvillajosBelum ada peringkat
- Capacitor Voltage TransformerDokumen1 halamanCapacitor Voltage Transformerdeep_sparklingBelum ada peringkat
- TRFR Test FormatDokumen8 halamanTRFR Test FormatdilipelineBelum ada peringkat
- Short Circuit Calculation: Presented By: Louige Angelu PairatDokumen25 halamanShort Circuit Calculation: Presented By: Louige Angelu PairatJules Patrick GoBelum ada peringkat
- Instrument Transformer BasicsDokumen37 halamanInstrument Transformer BasicsChandrasekar Karuppasamy100% (1)
- Capacitive Voltage Transformers CVT For HV MeasurementsDokumen4 halamanCapacitive Voltage Transformers CVT For HV Measurementshossam_24_6_722542Belum ada peringkat
- Electrical High Voltage BushingsDokumen49 halamanElectrical High Voltage BushingsShang Divina EbradaBelum ada peringkat
- Introduction To Instrument TransformersDokumen20 halamanIntroduction To Instrument TransformersAbdul'Azeez Stanley IgweBelum ada peringkat
- VIZIMAX - CIGRE Toronto - Using A Controlled Switching Device For A Power Transformer PDFDokumen8 halamanVIZIMAX - CIGRE Toronto - Using A Controlled Switching Device For A Power Transformer PDFgeorge_cpp2Belum ada peringkat
- Root-Cause Analysis of Transformer Failure Scenario at Power Sub-StationDokumen6 halamanRoot-Cause Analysis of Transformer Failure Scenario at Power Sub-StationShashank ChawdharyBelum ada peringkat
- Vector Group of TransformerDokumen3 halamanVector Group of TransformerjunfaBelum ada peringkat
- Feeder Protection Relay SpecificationDokumen4 halamanFeeder Protection Relay SpecificationMeghavahinaBelum ada peringkat
- Health Indexing of TransformerDokumen35 halamanHealth Indexing of TransformerSamanway BeraBelum ada peringkat
- 12 - Transformer ProtectionDokumen40 halaman12 - Transformer ProtectionSarthak Vats100% (2)
- Power-system protection A Complete GuideDari EverandPower-system protection A Complete GuidePenilaian: 1 dari 5 bintang1/5 (1)
- 2001 Peligro Ignición Ropa TrabajadoresDokumen4 halaman2001 Peligro Ignición Ropa TrabajadoresfreddyriveraBelum ada peringkat
- Electrical Circuits RefDokumen159 halamanElectrical Circuits ReffreddyriveraBelum ada peringkat
- Electrical Relay Diagram and PID SymbolsDokumen5 halamanElectrical Relay Diagram and PID SymbolsKARAM ZAKARIABelum ada peringkat
- Electric Circuit Analysis Lecture Notes Ecng 1000Dokumen119 halamanElectric Circuit Analysis Lecture Notes Ecng 1000freddyriveraBelum ada peringkat
- Flexible Distribution Systems Through The Application of Multi Back-To-Back Converters: Concept, Implementation and Experimental VerificationDokumen210 halamanFlexible Distribution Systems Through The Application of Multi Back-To-Back Converters: Concept, Implementation and Experimental Verificationphdtue100% (1)
- A Framework To Implement Supply and Demand Side (2007 PDFDokumen8 halamanA Framework To Implement Supply and Demand Side (2007 PDFhodeegits9526Belum ada peringkat
- Recogida Datos Interrupción PD Enero 2006 GiselaDokumen4 halamanRecogida Datos Interrupción PD Enero 2006 GiselafreddyriveraBelum ada peringkat
- Sistema Control Demanda Calentar Agua PD Enero 2006 JuanaDokumen10 halamanSistema Control Demanda Calentar Agua PD Enero 2006 JuanafreddyriveraBelum ada peringkat
- Es-V4 Hanbook ElectDokumen142 halamanEs-V4 Hanbook ElectfreddyriveraBelum ada peringkat
- Enfoque Basado en El Cliente PD en 07Dokumen9 halamanEnfoque Basado en El Cliente PD en 07freddyriveraBelum ada peringkat
- 01564207Dokumen9 halaman01564207amit621988Belum ada peringkat
- 2006 Mayo PS Reconfiguración Mínimas PérdidasDokumen7 halaman2006 Mayo PS Reconfiguración Mínimas PérdidasfreddyriveraBelum ada peringkat
- 2005 Mayo Previsión Conocimiento Carga Sistema ExpertoDokumen6 halaman2005 Mayo Previsión Conocimiento Carga Sistema ExpertofreddyriveraBelum ada peringkat
- 2006 Análisis Postmortem Del Apagón 01687815Dokumen6 halaman2006 Análisis Postmortem Del Apagón 01687815freddyriveraBelum ada peringkat
- 2006 PS Indicadores-Tiempo y Frecuencia InterrupciónDokumen6 halaman2006 PS Indicadores-Tiempo y Frecuencia InterrupciónfreddyriveraBelum ada peringkat
- 2006 Pand E Ambiente y Energía-SuraméricaDokumen15 halaman2006 Pand E Ambiente y Energía-SuraméricafreddyriveraBelum ada peringkat
- 2005 Mayo Previsión Conocimiento Carga Sistema ExpertoDokumen6 halaman2005 Mayo Previsión Conocimiento Carga Sistema ExpertofreddyriveraBelum ada peringkat
- 2002 Mayo PS Conocimiento DistribuciónDokumen6 halaman2002 Mayo PS Conocimiento DistribuciónfreddyriveraBelum ada peringkat
- 2003 PD Fuzzy Distribución IncertidumbreDokumen7 halaman2003 PD Fuzzy Distribución IncertidumbrefreddyriveraBelum ada peringkat
- Good Article On Power Int EruptionsDokumen5 halamanGood Article On Power Int Eruptionsjluiszv19861367Belum ada peringkat
- 2002 Febrero Selección Óptima Conductores DistribuciónDokumen6 halaman2002 Febrero Selección Óptima Conductores DistribuciónfreddyriveraBelum ada peringkat
- Coeficiente Transferencia Térmica PD Enero 2006 DavisDokumen7 halamanCoeficiente Transferencia Térmica PD Enero 2006 DavisfreddyriveraBelum ada peringkat
- 2003 Novembre PS Impacto Ambiental Precio EnergíaDokumen8 halaman2003 Novembre PS Impacto Ambiental Precio EnergíafreddyriveraBelum ada peringkat
- The Influence of Transformer Winding ConnectionsDokumen8 halamanThe Influence of Transformer Winding Connectionszoran0605Belum ada peringkat
- Coeficiente Transferencia Térmica PD Enero 2006 DavisDokumen7 halamanCoeficiente Transferencia Térmica PD Enero 2006 DavisfreddyriveraBelum ada peringkat
- 2007 Abril PD Fallas TransformadoresDokumen6 halaman2007 Abril PD Fallas TransformadoresfreddyriveraBelum ada peringkat
- Pérdida Sincronismo PD Enero 2006Dokumen10 halamanPérdida Sincronismo PD Enero 2006freddyriveraBelum ada peringkat
- RFID Based Prepaid Energy MeterDokumen38 halamanRFID Based Prepaid Energy MeterSaad Ali100% (1)
- 04.0 #48 Electricity IIDokumen19 halaman04.0 #48 Electricity IIAmishBelum ada peringkat
- ISL6269 Data SheetDokumen14 halamanISL6269 Data SheetSummer SpringBelum ada peringkat
- Tehnicni Program SESSION 2018Dokumen34 halamanTehnicni Program SESSION 2018kenlavie2Belum ada peringkat
- Circuit Lab Introduction I ECE - Partial NotesDokumen27 halamanCircuit Lab Introduction I ECE - Partial NotesDr.P. RAJASEKARBelum ada peringkat
- W.E. Anderson V10Dokumen2 halamanW.E. Anderson V10Robert RojasBelum ada peringkat
- UNIT-2 Part 1: Electrostatics: Absolute PermitivityDokumen12 halamanUNIT-2 Part 1: Electrostatics: Absolute PermitivityMonkey dragon10100% (1)
- 4 Jacob Lewis Bourjaily: Q D W DDokumen1 halaman4 Jacob Lewis Bourjaily: Q D W DHeber AndradaBelum ada peringkat
- Wireless Power Transfer Thesis PDFDokumen8 halamanWireless Power Transfer Thesis PDFfd0kyjpa100% (2)
- Manual Areva c264 en T c30 GlobalDokumen494 halamanManual Areva c264 en T c30 GlobalAgusRiyantoBelum ada peringkat
- Rain Sensor Applic NoteDokumen6 halamanRain Sensor Applic NoteCristina Andreea IovaBelum ada peringkat
- Electrical: ElectronicDokumen250 halamanElectrical: ElectronicSaavedra LopezBelum ada peringkat
- Integrated CircuitsDokumen46 halamanIntegrated CircuitsSai LakshmiBelum ada peringkat
- CapacitorsDokumen35 halamanCapacitorsLourdes Marie MirasolBelum ada peringkat
- 1st - & - 2nd - Sem - Diploma SyllabusDokumen50 halaman1st - & - 2nd - Sem - Diploma Syllabusvj4249Belum ada peringkat
- 3rd Sem Electric CircuitDokumen57 halaman3rd Sem Electric CircuitRajkumarJhapteBelum ada peringkat
- 2014 Fist 4-1B 03062015 PDFDokumen100 halaman2014 Fist 4-1B 03062015 PDFShahid IqbalBelum ada peringkat
- 12TH em Unit 1 To 11 Notes PDFDokumen135 halaman12TH em Unit 1 To 11 Notes PDFUma Maheswari100% (1)
- CK1620 - Door Minder: ConstructionDokumen3 halamanCK1620 - Door Minder: ConstructionIon GrigorashBelum ada peringkat
- Transient AnalysisDokumen85 halamanTransient AnalysiskishorechiyaBelum ada peringkat
- Application Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Dokumen18 halamanApplication Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Osama YaseenBelum ada peringkat
- ADMV1014 (24 - 44 GHZ Downconverter)Dokumen42 halamanADMV1014 (24 - 44 GHZ Downconverter)SergeyBelum ada peringkat
- Service Manual Aiwa NSX-R37Dokumen55 halamanService Manual Aiwa NSX-R37Zoran ProkicBelum ada peringkat
- Introduction To Harmonic Filters and HarmonicsDokumen5 halamanIntroduction To Harmonic Filters and HarmonicsMohamed EhabBelum ada peringkat
- PST Unit 2Dokumen12 halamanPST Unit 2Karthick Sivakumar ChellamuthuBelum ada peringkat
- Clock Generator FunctionDokumen16 halamanClock Generator FunctionBala GopalBelum ada peringkat
- Test-2 - Capacitor + Work + CurrentDokumen7 halamanTest-2 - Capacitor + Work + CurrentSombir AhlawatBelum ada peringkat