Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Web Solutions For How To Read and Do Proofs An Introduction To Mathematical Thought Processes Daniel Solow 6th PDFDokumen103 halamanWeb Solutions For How To Read and Do Proofs An Introduction To Mathematical Thought Processes Daniel Solow 6th PDFAnonymous jhBrpi100% (2)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- SGPE Econometrics Lab 5: Returns To Scale in Electricity Supply Mark Schaffer Version of 21.10.2016Dokumen13 halamanSGPE Econometrics Lab 5: Returns To Scale in Electricity Supply Mark Schaffer Version of 21.10.2016ZahirlianBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Features Common To All ForecastsDokumen5 halamanFeatures Common To All ForecastsGeneVive Mendoza40% (5)
- SGPE Econometrics Lecture 1 OLSDokumen87 halamanSGPE Econometrics Lecture 1 OLSZahirlianBelum ada peringkat
- Degree of FreedomDokumen16 halamanDegree of FreedomMuhammad SaeedBelum ada peringkat
- Derivatives Involving Absolute ValueDokumen2 halamanDerivatives Involving Absolute ValuelfcguardBelum ada peringkat
- Degrees of FreedomDokumen11 halamanDegrees of FreedomJoss Mankad100% (1)
- Fisher ExactFisher Exact Variance Test For The Poisson Distribution Variance Test For The Poisson DistributionDokumen6 halamanFisher ExactFisher Exact Variance Test For The Poisson Distribution Variance Test For The Poisson DistributionZahirlianBelum ada peringkat
- Non SingularDokumen16 halamanNon Singularamera_naBelum ada peringkat
- Young People and Alcohol. An Econometric AnalysisDokumen10 halamanYoung People and Alcohol. An Econometric AnalysisZahirlianBelum ada peringkat
- This Paper Is The Personal Property of Prof. Mike Soledad of Davao Doctors College and May Not Be Reproduced Without The ExpressedDokumen11 halamanThis Paper Is The Personal Property of Prof. Mike Soledad of Davao Doctors College and May Not Be Reproduced Without The ExpressedNeil NaduaBelum ada peringkat
- Prediction Water Influx of Edge Water PAPER SPEDokumen20 halamanPrediction Water Influx of Edge Water PAPER SPEalvarodimassimo04Belum ada peringkat
- Quantitative Methods High-Yield NotesDokumen32 halamanQuantitative Methods High-Yield NotesRaiBelum ada peringkat
- 02 WholeDokumen308 halaman02 WholeEdu CordonBelum ada peringkat
- Standford - HRP 259 Introduction To Probability and Statistics - Linear RegressionDokumen79 halamanStandford - HRP 259 Introduction To Probability and Statistics - Linear RegressionManuelBelum ada peringkat
- Determinants of Total Asset Growth in Micro and Small-Scale Enterprise in Gondar City, EthiopiaDokumen8 halamanDeterminants of Total Asset Growth in Micro and Small-Scale Enterprise in Gondar City, EthiopiaPremier PublishersBelum ada peringkat
- H2 Math (Topical Set1)Dokumen25 halamanH2 Math (Topical Set1)YJ KevinBelum ada peringkat
- Factors Affecting Reading PerformanceDokumen10 halamanFactors Affecting Reading PerformanceKeith VilardeBelum ada peringkat
- 2009 Hoffman Et Al., MLB Paper Anthropometric - and - Performance - Comparisons - In. JSCR 2009Dokumen6 halaman2009 Hoffman Et Al., MLB Paper Anthropometric - and - Performance - Comparisons - In. JSCR 2009Naty GalindoBelum ada peringkat
- Traducido DespuésDokumen19 halamanTraducido DespuésSandra GarcíaBelum ada peringkat
- Prosper 444 PDFDokumen27 halamanProsper 444 PDFaliBelum ada peringkat
- 1995 - Dechow, Sloan, Sweeney - Jurnal - Detecting Earnings ManagementDokumen34 halaman1995 - Dechow, Sloan, Sweeney - Jurnal - Detecting Earnings ManagementTeguh Adiguna WeynandBelum ada peringkat
- Factors Affecting Contract Management in Kenya's Public SectorDokumen11 halamanFactors Affecting Contract Management in Kenya's Public SectorERNEST KAIGEBelum ada peringkat
- FERUM4.1 Users GuideDokumen21 halamanFERUM4.1 Users GuideKenneth DavisBelum ada peringkat
- Research Methods, 9Th Edition: Theresa L. White and Donald H. McburneyDokumen145 halamanResearch Methods, 9Th Edition: Theresa L. White and Donald H. McburneyKassandra MartinezBelum ada peringkat
- Factor AnalysisDokumen26 halamanFactor AnalysisAishatu Musa AbbaBelum ada peringkat
- Syllabus: Cambridge O Level Statistics 4040Dokumen22 halamanSyllabus: Cambridge O Level Statistics 4040Memona EmmanBelum ada peringkat
- Factor Analysis To Evaluate Hospital ResilienceDokumen7 halamanFactor Analysis To Evaluate Hospital ResiliencecemadaroBelum ada peringkat
- Stata Multivariate Statistics Reference Manual: Release 11Dokumen694 halamanStata Multivariate Statistics Reference Manual: Release 11ElizabethSartreBelum ada peringkat
- C11EMMathematicsAndStatesticsPart2Commerce PDFDokumen174 halamanC11EMMathematicsAndStatesticsPart2Commerce PDFrukminiBelum ada peringkat
- Employee Morale Study of Butterfly Gandhimathi Appliance Pvt LtdDokumen18 halamanEmployee Morale Study of Butterfly Gandhimathi Appliance Pvt LtdAnandBelum ada peringkat
- Tugas Jurnal TeksolDokumen6 halamanTugas Jurnal TeksolNovita IndahBelum ada peringkat
- The Aggression Questionnaire: Arnold H. Buss and Mark PerryDokumen8 halamanThe Aggression Questionnaire: Arnold H. Buss and Mark PerryIsalba GloriaBelum ada peringkat
- Assessment of Learning 1 PPT 1 DelivaDokumen26 halamanAssessment of Learning 1 PPT 1 DelivaRey LeoninBelum ada peringkat
- Assessment of Six Daily Diffuse Solar Radiation Models For Nigeria PDFDokumen9 halamanAssessment of Six Daily Diffuse Solar Radiation Models For Nigeria PDFChukwu Chukwuemeka JudeBelum ada peringkat
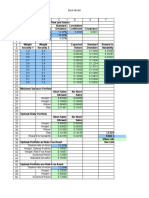
- BKM 10e Ch07 Two Security ModelDokumen2 halamanBKM 10e Ch07 Two Security ModelJoe IammarinoBelum ada peringkat
- Findings, Suggestions and ConclusionDokumen41 halamanFindings, Suggestions and ConclusionsmartwaiBelum ada peringkat
- Understanding the Phi CoefficientDokumen130 halamanUnderstanding the Phi CoefficientAj RosalBelum ada peringkat
- What Is DISCDokumen24 halamanWhat Is DISCMag Neto100% (2)