Anda mungkin juga menyukai
- E3130002 Rede ConvencionalDokumen124 halamanE3130002 Rede ConvencionalCedinir FabiczBelum ada peringkat
- Tabela 5 - Dimensões e Arranjos NormalizadosDokumen1 halamanTabela 5 - Dimensões e Arranjos NormalizadosCedinir FabiczBelum ada peringkat
- Mlexs Suz16012 - Suz16019 1 PDFDokumen14 halamanMlexs Suz16012 - Suz16019 1 PDFCedinir Fabicz100% (1)
- Tabela 14 - Esforços MecânicosDokumen1 halamanTabela 14 - Esforços MecânicosCedinir FabiczBelum ada peringkat
- Multifuncao 6 Funcoes PDFDokumen2 halamanMultifuncao 6 Funcoes PDFCedinir FabiczBelum ada peringkat
- Mlexs Suz16012 - Suz16019 1 PDFDokumen14 halamanMlexs Suz16012 - Suz16019 1 PDFCedinir Fabicz100% (1)
- Cálculo Térmico PDFDokumen8 halamanCálculo Térmico PDFCedinir FabiczBelum ada peringkat
- EletronicaDokumen43 halamanEletronicaCedinir FabiczBelum ada peringkat
- Cálculo TérmicoDokumen8 halamanCálculo TérmicoCedinir FabiczBelum ada peringkat
- Tratamento de Icterícia NeonatalDokumen10 halamanTratamento de Icterícia NeonatalAcbal AchyBelum ada peringkat
- DBF para SisvarDokumen3 halamanDBF para SisvarEdi Alves PurificaçãoBelum ada peringkat
- Rev 03Dokumen285 halamanRev 03William Dos SantosBelum ada peringkat
- Escala de Vulnerabilidade ... Stresse No Trabalho (Dokumen19 halamanEscala de Vulnerabilidade ... Stresse No Trabalho (Lenisa Veiga100% (1)
- Ar Condicionado PDFDokumen28 halamanAr Condicionado PDFpaulo102030Belum ada peringkat
- Dimensionamento de HelicesDokumen13 halamanDimensionamento de HelicesKamilla Friás100% (1)
- Brousseau G. SlidesDokumen67 halamanBrousseau G. SlidesE_RCARVALHO100% (1)
- Nivelamento - Eletricidade BásicaDokumen52 halamanNivelamento - Eletricidade BásicaNayara MercesBelum ada peringkat
- Manual Do Usuário Do PETRADokumen67 halamanManual Do Usuário Do PETRAMagno RégisBelum ada peringkat
- Optic ADokumen6 halamanOptic ApaulaorobertaoBelum ada peringkat
- Sova Fácil SF 300Dokumen36 halamanSova Fácil SF 300Daiane FerreiraBelum ada peringkat
- Estruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaDokumen69 halamanEstruturas Metálicas - Dimensionamento À Tração: Disciplina: Projeto de Instalações Hidráulicas Prof. Msc. Igor LimaALAN DOURADO DE CASTROBelum ada peringkat
- Dilatação TérmicaDokumen10 halamanDilatação TérmicaCarol MouraBelum ada peringkat
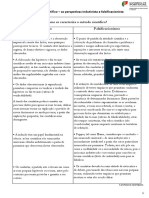
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDokumen2 halamanO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraBelum ada peringkat
- Ajuste Do Excesso de Ar Na Queima Do Bagaço de CanaDokumen1 halamanAjuste Do Excesso de Ar Na Queima Do Bagaço de CanaAnonymous QY7Iu8fBBelum ada peringkat
- Notas para Um CGE in MZDokumen10 halamanNotas para Um CGE in MZCassio RolimBelum ada peringkat
- Prova 7 º Ano Matematica Sme RJDokumen16 halamanProva 7 º Ano Matematica Sme RJVanessa GomesBelum ada peringkat
- SO InformáticaDokumen39 halamanSO InformáticaDavi OliveiraBelum ada peringkat
- Termodinâmica - FÍSICA (PROF. HENRIQUE)Dokumen6 halamanTermodinâmica - FÍSICA (PROF. HENRIQUE)Henrique ToledoBelum ada peringkat
- NBR5261Dokumen5 halamanNBR5261Geovane CostaBelum ada peringkat
- Atividade de Recuperação Paralela 3 AnoDokumen1 halamanAtividade de Recuperação Paralela 3 AnofelupealmeidqBelum ada peringkat
- UntitledDokumen37 halamanUntitledAnna Gabriele Marques de OliveiraBelum ada peringkat
- NBR Iec 60079-28Dokumen37 halamanNBR Iec 60079-28Lugo EngenhariaBelum ada peringkat
- Apostila Natal Venda Além de Panetone-COMPLETADokumen9 halamanApostila Natal Venda Além de Panetone-COMPLETASamora Tooling Engineer88% (8)
- Fichas Tecnicas OriginalDokumen204 halamanFichas Tecnicas OriginalgrassiengenhariaBelum ada peringkat
- Fundamentos Da HarmoniaDokumen108 halamanFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- Análise Real 1Dokumen45 halamanAnálise Real 1Valdirene M. FerreiraBelum ada peringkat
- Memorial Descritivo AutomaçãoDokumen13 halamanMemorial Descritivo AutomaçãoregfsdgfBelum ada peringkat
- Potência Máquinas Metais, Cabos e CobreDokumen3 halamanPotência Máquinas Metais, Cabos e CobreadailsonBelum ada peringkat
- AVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoDokumen4 halamanAVALIAÇÃO BIMESTRAL DE FISICA - 2º Bimestre - 3º AnoÉder MunizBelum ada peringkat