Anda mungkin juga menyukai
- Sita's RamayanaDokumen2 halamanSita's RamayanaAnonymous dSuPcxyn0% (1)
- Unwinder CalculationDokumen3 halamanUnwinder CalculationAbineshBelum ada peringkat
- Study On Torsional Stiffness of Engine CrankshaftDokumen5 halamanStudy On Torsional Stiffness of Engine CrankshaftBestin VargheseBelum ada peringkat
- Design II MDE 221 Mott CH 8 and CH 9 Spur GearsDokumen42 halamanDesign II MDE 221 Mott CH 8 and CH 9 Spur GearsThieroy PelendaBelum ada peringkat
- A Presentation On Shaded Pole Induction Motor: Prepared By: Salunkhe KalpeshDokumen20 halamanA Presentation On Shaded Pole Induction Motor: Prepared By: Salunkhe KalpeshKalpesh SalunkheBelum ada peringkat
- Singapore Airlines PDFDokumen10 halamanSingapore Airlines PDF....Belum ada peringkat
- A Christmas Carol ScriptDokumen95 halamanA Christmas Carol ScriptBrian O'BrienBelum ada peringkat
- Hitachi ZX75USDokumen9 halamanHitachi ZX75US3man 9394Belum ada peringkat
- Motor Calculations PDFDokumen8 halamanMotor Calculations PDFheroBelum ada peringkat
- Motor Sizing CalculationDokumen3 halamanMotor Sizing CalculationRizwan TahirBelum ada peringkat
- Torque and Inertia CalculationsDokumen20 halamanTorque and Inertia Calculationsmanfredm6435Belum ada peringkat
- Braking and Regenerative Energy With AC Drives: Application SolutionDokumen5 halamanBraking and Regenerative Energy With AC Drives: Application Solutionriver101Belum ada peringkat
- Motion Control Basics PDFDokumen8 halamanMotion Control Basics PDFFouad ElhajjiBelum ada peringkat
- Example Bearing CalculationDokumen67 halamanExample Bearing CalculationFarid Nasri100% (1)
- Drive Selection of Rolling MillsDokumen4 halamanDrive Selection of Rolling MillsCihan OzturkBelum ada peringkat
- AC Drives Reliance ElectricDokumen12 halamanAC Drives Reliance ElectricnmvikramBelum ada peringkat
- Em 1 TestingDokumen13 halamanEm 1 TestingAravindBelum ada peringkat
- Mass Flow Control For Intercritical RollingDokumen11 halamanMass Flow Control For Intercritical RollingMeltz Njoroge100% (1)
- SimulationofBLDCMotorinANSYSMaxwell PDFDokumen109 halamanSimulationofBLDCMotorinANSYSMaxwell PDFRekha JayarajanBelum ada peringkat
- Research and Design of Hydraulic AGC System Model of Cold Rolling MillDokumen8 halamanResearch and Design of Hydraulic AGC System Model of Cold Rolling MillOmid Behniya100% (1)
- Construction of Machine PDFDokumen110 halamanConstruction of Machine PDFAvinash SinghBelum ada peringkat
- Air GapDokumen20 halamanAir GapSurabhi MattaBelum ada peringkat
- Root Cause Analysis of Bridle Roll Shaft Failure at Continuous Process IndustryDokumen15 halamanRoot Cause Analysis of Bridle Roll Shaft Failure at Continuous Process IndustryPuja BhandarkarBelum ada peringkat
- PMBLDC Motor DriveDokumen55 halamanPMBLDC Motor DriveSushant SinghBelum ada peringkat
- Starting and Speed Control of 3 Phase Induction MotorDokumen38 halamanStarting and Speed Control of 3 Phase Induction MotorSree ShobhaBelum ada peringkat
- AGC TenovaDokumen2 halamanAGC TenovaVikram TambeBelum ada peringkat
- VVVF DrivesDokumen16 halamanVVVF DrivesIsradani MjBelum ada peringkat
- Stepper MotorDokumen26 halamanStepper MotorSupriya Rakshit100% (1)
- Stepper Motors: Stepper Motor vs. Servo MotorDokumen13 halamanStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- PATENT - Axial Flux Motor AssemblyDokumen13 halamanPATENT - Axial Flux Motor Assemblyrakeshee2007Belum ada peringkat
- Edge Baffle AsslyDokumen4 halamanEdge Baffle AsslyVikram TambeBelum ada peringkat
- AC Series MotorsDokumen8 halamanAC Series Motorsゞ『HaiDerツ98〆Belum ada peringkat
- MIT Belt and Chain DrivesDokumen25 halamanMIT Belt and Chain DrivesSiddhanth VenugopalBelum ada peringkat
- Unit 3 SRMDokumen66 halamanUnit 3 SRMDr SriBelum ada peringkat
- Design of Transmission Systems-Question BankDokumen28 halamanDesign of Transmission Systems-Question BankAlfred Franklin V100% (1)
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDokumen3 halamanStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsBelum ada peringkat
- Selection Calculations For Motors PDFDokumen17 halamanSelection Calculations For Motors PDFbibhansuBelum ada peringkat
- Hysteresis MotorDokumen27 halamanHysteresis MotorSubham GhoshBelum ada peringkat
- 6 Effect of Backup Roll Length and Roll Neck Length On Profile ForDokumen7 halaman6 Effect of Backup Roll Length and Roll Neck Length On Profile Foromid hamidishadBelum ada peringkat
- Hystersis Motor PDFDokumen15 halamanHystersis Motor PDFJohn BogyBelum ada peringkat
- Ac Series MotorDokumen15 halamanAc Series MotorMani Balaji TBelum ada peringkat
- 4.2 Solution (Static Analysis) 44Dokumen67 halaman4.2 Solution (Static Analysis) 44Raj Deep TiwariBelum ada peringkat
- Chapter 15 BalancingDokumen26 halamanChapter 15 BalancingHardeepsinh G RanaBelum ada peringkat
- Clutch PDFDokumen20 halamanClutch PDFClaudio Godoy GallegosBelum ada peringkat
- Ac Motor Control k2636 - Rev2Dokumen12 halamanAc Motor Control k2636 - Rev2kobiBelum ada peringkat
- Adaptive Design of Machine Tool GearboxesDokumen9 halamanAdaptive Design of Machine Tool Gearboxesأحمد دعبسBelum ada peringkat
- ME308 Second Project PDFDokumen13 halamanME308 Second Project PDFOzan OzgenBelum ada peringkat
- Tata 1-1 PDFDokumen5 halamanTata 1-1 PDFManoj kumarBelum ada peringkat
- Active Suspension System With Preview ControlDokumen5 halamanActive Suspension System With Preview Controlrudey18Belum ada peringkat
- TE - 2019 - Design of Machine Elements PDFDokumen4 halamanTE - 2019 - Design of Machine Elements PDFonkar nikamBelum ada peringkat
- Industrial Drive Unit 1Dokumen24 halamanIndustrial Drive Unit 1Nilanjan PodderBelum ada peringkat
- Worm GearsDokumen27 halamanWorm GearsDipakBelum ada peringkat
- Rack and Pinion Steering DesigningDokumen19 halamanRack and Pinion Steering DesigningAudrian Louven Realubit Sabado0% (2)
- Stepping Motors Brushless Pag 21Dokumen49 halamanStepping Motors Brushless Pag 21Luis R. Cabrales JimenezBelum ada peringkat
- Stepper Motor CatalogueDokumen28 halamanStepper Motor CatalogueSuvek KumarBelum ada peringkat
- Ac Drives in Metal IndustryDokumen6 halamanAc Drives in Metal IndustryvikramtambeBelum ada peringkat
- 3phase Induction Motor (Sukhpreet)Dokumen17 halaman3phase Induction Motor (Sukhpreet)Ankesh KunwarBelum ada peringkat
- Cam MechDokumen24 halamanCam MechmarcglebBelum ada peringkat
- Motor WindingsDokumen12 halamanMotor WindingsAbiodun IloriBelum ada peringkat
- Cruise Control of Bruhless DC MotorDokumen12 halamanCruise Control of Bruhless DC MotorVishal PhadtareBelum ada peringkat
- Motor Sizing Made EasyDokumen3 halamanMotor Sizing Made EasyTurbosMixerBelum ada peringkat
- DC Motor Calculations - Calculating Torque - MICROMODokumen8 halamanDC Motor Calculations - Calculating Torque - MICROMOaniruthBelum ada peringkat
- 390 MotorDokumen14 halaman390 MotorAlex MoiseBelum ada peringkat
- Harmony of A Song. Lester "Pres" Young, Melodic Improvisation. TH Rhyth-Mic LevelDokumen1 halamanHarmony of A Song. Lester "Pres" Young, Melodic Improvisation. TH Rhyth-Mic LevelmuhdqasimBelum ada peringkat
- Simple Flat-Belt DrivesDokumen1 halamanSimple Flat-Belt DrivesmuhdqasimBelum ada peringkat
- Thriving On A Riff: During The Summers, IDokumen1 halamanThriving On A Riff: During The Summers, ImuhdqasimBelum ada peringkat
- Worm and Worm Wheel NomenclatureDokumen1 halamanWorm and Worm Wheel NomenclaturemuhdqasimBelum ada peringkat
- Thriving On Riff 2Dokumen1 halamanThriving On Riff 2muhdqasimBelum ada peringkat
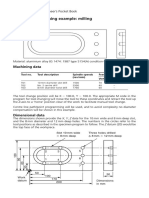
- 8.1.12 Programming Example: Milling: ComponentDokumen1 halaman8.1.12 Programming Example: Milling: ComponentmuhdqasimBelum ada peringkat
- 5.2.2 Compound Flat-Belt Drives: 374 Mechanical Engineer's Pocket BookDokumen1 halaman5.2.2 Compound Flat-Belt Drives: 374 Mechanical Engineer's Pocket BookmuhdqasimBelum ada peringkat
- Typical Belt Tensioning DevicesDokumen1 halamanTypical Belt Tensioning DevicesmuhdqasimBelum ada peringkat
- 8.1.11 Programming Techniques: Milling and Drilling: Canned CyclesDokumen1 halaman8.1.11 Programming Techniques: Milling and Drilling: Canned CyclesmuhdqasimBelum ada peringkat
- CNC Commands and DescriptionDokumen1 halamanCNC Commands and DescriptionmuhdqasimBelum ada peringkat
- Ansys SolutionDokumen9 halamanAnsys SolutionmuhdqasimBelum ada peringkat
- Roof Manhole Detail For Vertical Tanks Ul 142Dokumen1 halamanRoof Manhole Detail For Vertical Tanks Ul 142muhdqasimBelum ada peringkat
- Design BasisDokumen1 halamanDesign BasismuhdqasimBelum ada peringkat
- Tank Weight and CapacityDokumen1 halamanTank Weight and CapacitymuhdqasimBelum ada peringkat
- Head Joints As Per UL142Dokumen2 halamanHead Joints As Per UL142muhdqasimBelum ada peringkat
- Shell Manhole Detail For Vertical Tanks Ul 142Dokumen1 halamanShell Manhole Detail For Vertical Tanks Ul 142muhdqasimBelum ada peringkat
- Chapter 8 - LoadingDokumen8 halamanChapter 8 - LoadingmuhdqasimBelum ada peringkat
- Linear Motion GraphsDokumen2 halamanLinear Motion GraphsNajwa Huda ShaharilBelum ada peringkat
- Class TestDokumen15 halamanClass TestMitul KaziBelum ada peringkat
- Raman SpectraDokumen22 halamanRaman SpectraAnanda SelvamBelum ada peringkat
- Il Ruolo Delle Esperienze Religiose Nella Cultura Della LegalitàDokumen42 halamanIl Ruolo Delle Esperienze Religiose Nella Cultura Della LegalitàMarisa La BarberaBelum ada peringkat
- Ata 21 AirconditionDokumen198 halamanAta 21 Airconditionviney1130Belum ada peringkat
- IRC CodesDokumen23 halamanIRC CodesabhijithavalBelum ada peringkat
- Arquitectura de SoftwareDokumen6 halamanArquitectura de SoftwareDiego Alejandro Muñoz ToroBelum ada peringkat
- 20 Leverage of E Marketing A CaseStudy of Reliance Jio PDFDokumen5 halaman20 Leverage of E Marketing A CaseStudy of Reliance Jio PDFankush birlaBelum ada peringkat
- Syllabuses MSC (Eng) 2014-15Dokumen78 halamanSyllabuses MSC (Eng) 2014-15kelvinaaaBelum ada peringkat
- The Cognitive Science of Learning - Concepts and Strategies For The Educator and LearnerDokumen14 halamanThe Cognitive Science of Learning - Concepts and Strategies For The Educator and LearnerNicholas BoonBelum ada peringkat
- Johnson Power Pumping CatalogDokumen24 halamanJohnson Power Pumping CatalogAlvaro Patricio Etcheverry TroncosoBelum ada peringkat
- OverlandersDokumen17 halamanOverlandersJoe FloodBelum ada peringkat
- Subject - Monetary Economics: MoneyDokumen4 halamanSubject - Monetary Economics: MoneyRajat LonareBelum ada peringkat
- Guidelines For Mental Care Onboard Merchant Ships: ContentDokumen12 halamanGuidelines For Mental Care Onboard Merchant Ships: ContentSona NarulaBelum ada peringkat
- Avy eDokumen11 halamanAvy emsvkumar0% (1)
- Capitec Case StudyDokumen6 halamanCapitec Case StudyMpho SeutloaliBelum ada peringkat
- Megawatt Station Inverter PVS800 1 To 1.25MW-ABBDokumen4 halamanMegawatt Station Inverter PVS800 1 To 1.25MW-ABBkimscribd66Belum ada peringkat
- Ajax UlerDokumen19 halamanAjax UlernsbBelum ada peringkat
- Surf Excel ND AirelDokumen13 halamanSurf Excel ND AirelPratibha Chandil100% (1)
- Tutorial Week 10 Topic 9Dokumen14 halamanTutorial Week 10 Topic 9patricia93limBelum ada peringkat
- Defining Your Core ValuesDokumen2 halamanDefining Your Core ValuesMaria Elizabeth Smith100% (2)
- TestingDokumen116 halamanTestingAkarsh LBelum ada peringkat
- CitationDokumen1 halamanCitationJennifer A. IñigoBelum ada peringkat
- Aakash ADV Full Tests MERGEDDokumen486 halamanAakash ADV Full Tests MERGEDAnirudh100% (1)
- 20 - Offshore Construction - Part 1Dokumen27 halaman20 - Offshore Construction - Part 1Edytha SimamoraBelum ada peringkat
- 1993 Book Non ThermalPlasmaTechniquesFor 2Dokumen422 halaman1993 Book Non ThermalPlasmaTechniquesFor 2denizinak100% (1)