Anda mungkin juga menyukai
- Diseño de Celdas RobóticasDokumen13 halamanDiseño de Celdas RobóticasMonse Acosta0% (1)
- Seguridad en Celdas RobotizadasDokumen10 halamanSeguridad en Celdas RobotizadasChristian LascanoBelum ada peringkat
- ABB - 3HAC047136 PM IRC5-es PDFDokumen348 halamanABB - 3HAC047136 PM IRC5-es PDFantonioBelum ada peringkat
- Robot Studio 3 (1) .2 Guia Del Usuario SpanishDokumen424 halamanRobot Studio 3 (1) .2 Guia Del Usuario Spanishairon_iva7880Belum ada peringkat
- Diseño de Celdas RobóticasDokumen5 halamanDiseño de Celdas RobóticasJuan Carlos Barberán MuñozBelum ada peringkat
- Operacion de Robots CRSDokumen46 halamanOperacion de Robots CRSJorge L. Aguilar MartínezBelum ada peringkat
- Kuka KR6 R900Dokumen41 halamanKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- TSM C001 Curso Basico PLCDokumen22 halamanTSM C001 Curso Basico PLCJason PerezBelum ada peringkat
- 4 ED Programación de SubrutinasDokumen9 halaman4 ED Programación de SubrutinasAlfredo Manuel Romo CruzBelum ada peringkat
- Sistemas de Coordenadas. TCPDokumen12 halamanSistemas de Coordenadas. TCPJose Antonio Mercado100% (1)
- MANUAL ROBOT MotomanDokumen5 halamanMANUAL ROBOT Motomanrulomagana0% (1)
- ROBODKDokumen91 halamanROBODKnick100% (2)
- CV-X Series Setup Manual - ESPDokumen218 halamanCV-X Series Setup Manual - ESPJuan Antonio Sánchez0% (1)
- Lenguaje de Programacion KukaDokumen14 halamanLenguaje de Programacion KukaSebastianD.L.T.CastañedaBelum ada peringkat
- Manual Kuka 13Dokumen496 halamanManual Kuka 13Albert Llobet Sixto67% (6)
- Flexpendant Abb PDFDokumen366 halamanFlexpendant Abb PDFOmar RamosBelum ada peringkat
- Programación de Robots IDokumen181 halamanProgramación de Robots IMaldito SudacaBelum ada peringkat
- Como Usar Cosimir EducationDokumen35 halamanComo Usar Cosimir EducationJose Armando Ascencio Olvera100% (1)
- Entradas y SalidasDokumen71 halamanEntradas y SalidasJose Antonio MercadoBelum ada peringkat
- Kuka MecanizadoDokumen17 halamanKuka MecanizadoAndres EspinosaBelum ada peringkat
- Software CosimirDokumen8 halamanSoftware CosimirCarlos PavaBelum ada peringkat
- 01 - Ast Cambio de Encoder Robot FanucDokumen3 halaman01 - Ast Cambio de Encoder Robot FanucEduardo BrisoBelum ada peringkat
- Tutorial Delmia 1 PDFDokumen18 halamanTutorial Delmia 1 PDFingmontoya704754Belum ada peringkat
- Variables de Systema - EsDokumen204 halamanVariables de Systema - EsiagomouBelum ada peringkat
- 3HAC020738 RESOLUCION DE PROBLEMAS IRC5-es PDFDokumen586 halaman3HAC020738 RESOLUCION DE PROBLEMAS IRC5-es PDFrikardo530100% (2)
- Manual Robótica UTN - 2. La Seguridad en Las Celdas RobotizadasDokumen48 halamanManual Robótica UTN - 2. La Seguridad en Las Celdas RobotizadasLaura Velazquez100% (1)
- Diseño Celdas RobóticasDokumen8 halamanDiseño Celdas RobóticasChristian Lascano0% (1)
- Caracerizacion de Robot FamucDokumen70 halamanCaracerizacion de Robot FamucJulia FernandezBelum ada peringkat
- Guía Del Estudiante Mtto Elect R30iA Esp - Rev 0.0Dokumen198 halamanGuía Del Estudiante Mtto Elect R30iA Esp - Rev 0.0ds42058Belum ada peringkat
- Manual Del Operador: Unidad MecánicaDokumen230 halamanManual Del Operador: Unidad Mecánicabatiste alandeteBelum ada peringkat
- Karel: Guía de ProgramaciónDokumen25 halamanKarel: Guía de ProgramaciónJacobo Hernández VBelum ada peringkat
- Capitulo 9Dokumen27 halamanCapitulo 9zakty_182Belum ada peringkat
- Informe PTPDokumen13 halamanInforme PTPJacobo Javier Cáceres RodríguezBelum ada peringkat
- PRACTICA 2 - Control Manual y Automatico de Un Motor MonofasicoDokumen8 halamanPRACTICA 2 - Control Manual y Automatico de Un Motor MonofasicoEnrique BautistaBelum ada peringkat
- Procedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACDokumen32 halamanProcedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACJose Guillermo vazquez reyesBelum ada peringkat
- Procedimiento Cambio de Pilas y Calibracion Robots FanucDokumen11 halamanProcedimiento Cambio de Pilas y Calibracion Robots FanucMauricio GassmanBelum ada peringkat
- Proyecto Final-AutomatizacionDokumen70 halamanProyecto Final-AutomatizacionDrimec SrlBelum ada peringkat
- Programación TPE Nivel B FANUC RoboguideDokumen132 halamanProgramación TPE Nivel B FANUC RoboguideOscar Jiménez100% (2)
- Manuel Robot ABB-2600Dokumen408 halamanManuel Robot ABB-2600Tadeo Tadeo100% (2)
- Mantenimiento Robot ABBDokumen2 halamanMantenimiento Robot ABBRene Axel Montes RochaBelum ada peringkat
- Resumen de La Norma ISO 10218Dokumen14 halamanResumen de La Norma ISO 10218kevinBelum ada peringkat
- Manual IRB1600Dokumen420 halamanManual IRB1600AquilesBelum ada peringkat
- Guia Rapida FANUCVAG PDFDokumen13 halamanGuia Rapida FANUCVAG PDFkuajarlosBelum ada peringkat
- Generación de TrayectoriasDokumen18 halamanGeneración de TrayectoriasErick CastilloBelum ada peringkat
- Programar Robots ABBDokumen234 halamanProgramar Robots ABBGerardo Misael Garcia100% (6)
- Configuracion de PLCDokumen58 halamanConfiguracion de PLCFranco SotoBelum ada peringkat
- Rapid Abb EspañolDokumen927 halamanRapid Abb EspañolJoseBelum ada peringkat
- Práctica 4 - RoboDk - OfflineDokumen9 halamanPráctica 4 - RoboDk - OfflineEdison AlvaradoBelum ada peringkat
- Celulas RobotizadasDokumen4 halamanCelulas RobotizadasOscarBelum ada peringkat
- Robot 1L (5612)Dokumen41 halamanRobot 1L (5612)Carlos AntonioBelum ada peringkat
- RESUMEN 1 RobóticaDokumen24 halamanRESUMEN 1 RobóticaVivian AlvezBelum ada peringkat
- TEMA01Dokumen31 halamanTEMA01Manuel Garcia SuarezBelum ada peringkat
- Paper. Robótica Industrial PDFDokumen6 halamanPaper. Robótica Industrial PDFSebastián Contreras Ortiz100% (2)
- Preguntas Examen T8Dokumen4 halamanPreguntas Examen T8Jesus Mejias CortesBelum ada peringkat
- RoboticaDokumen113 halamanRoboticaRafael RodriguezBelum ada peringkat
- Guia CirosDokumen91 halamanGuia CirosHéctor PeñaBelum ada peringkat
- Pract 1 DataDokumen8 halamanPract 1 DataRicardo UribeBelum ada peringkat
- Introduccion A La RoboticaDokumen5 halamanIntroduccion A La RoboticaGanimedes EstelarBelum ada peringkat
- Robotica - Brazo Robotico Con Pic'sDokumen9 halamanRobotica - Brazo Robotico Con Pic'sRaul Alberto Valdez BarreraBelum ada peringkat
- Tarea#1 - Román Eduardo Olivares GómezDokumen17 halamanTarea#1 - Román Eduardo Olivares GómezLuis ChongBelum ada peringkat
- Todas Las Dimensiones Estan en MM: Barra de Ø 12Dokumen1 halamanTodas Las Dimensiones Estan en MM: Barra de Ø 12EberthsonBelum ada peringkat
- Todas Las Dimensiones Estan en MM: CamaraDokumen1 halamanTodas Las Dimensiones Estan en MM: CamaraEberthsonBelum ada peringkat
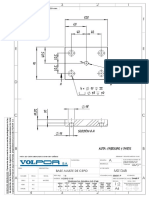
- Todas Las Dimensiones Estan en MM: Base Ajuste de CepoDokumen1 halamanTodas Las Dimensiones Estan en MM: Base Ajuste de CepoEberthsonBelum ada peringkat
- Todas Las Dimensiones Estan en MM: Taco de AjusteDokumen1 halamanTodas Las Dimensiones Estan en MM: Taco de AjusteEberthsonBelum ada peringkat
- Todas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasDokumen1 halamanTodas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasEberthsonBelum ada peringkat
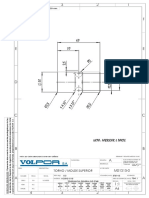
- Todas Las Dimensiones Estan en MM: Torno / Molde SuperiorDokumen1 halamanTodas Las Dimensiones Estan en MM: Torno / Molde SuperiorEberthsonBelum ada peringkat
- Corte Estructural Propuesta Final Extra GrandeDokumen1 halamanCorte Estructural Propuesta Final Extra GrandeEberthsonBelum ada peringkat
- Todas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasDokumen1 halamanTodas Las Dimensiones Estan en MM: Nota: Las Cotas Marcadas Con O Son CríticasEberthsonBelum ada peringkat
- Boca de LlenadoDokumen1 halamanBoca de LlenadoEberthsonBelum ada peringkat
- Corte Estructural Casa Final A2Dokumen1 halamanCorte Estructural Casa Final A2Eberthson100% (1)
- Agujeros Roscados Ciegos TTIDokumen1 halamanAgujeros Roscados Ciegos TTIEberthsonBelum ada peringkat
- Vebvg BG GDokumen1 halamanVebvg BG GEberthsonBelum ada peringkat
- Cascaras y Tabiques Verticales Tecnologia y Tecnica c1 2021Dokumen36 halamanCascaras y Tabiques Verticales Tecnologia y Tecnica c1 2021EberthsonBelum ada peringkat
- m00441 Premec Bolsillo de 1 PulgDokumen1 halamanm00441 Premec Bolsillo de 1 PulgEberthsonBelum ada peringkat
- Posición Descripción #De Plano Revisión Cantidad Marcación ObservacionesDokumen1 halamanPosición Descripción #De Plano Revisión Cantidad Marcación ObservacionesEberthsonBelum ada peringkat
- Codigo SN 03Dokumen20 halamanCodigo SN 03EberthsonBelum ada peringkat
- Parque La LloviznaDokumen2 halamanParque La LloviznaEfren J Aliendres L100% (1)
- Equipos Refrigeracion Comercial EscoFred 2013 PDFDokumen44 halamanEquipos Refrigeracion Comercial EscoFred 2013 PDFvalentinBelum ada peringkat
- Qué Es El Pensamiento LateralDokumen5 halamanQué Es El Pensamiento LateralJhon Alexander Lagos IpuzBelum ada peringkat
- Informe FQ2 Equipo 2Dokumen13 halamanInforme FQ2 Equipo 2Alberto YescasBelum ada peringkat
- Estrategias Agroecológicas para El Empleo Racional de La GallinazaDokumen60 halamanEstrategias Agroecológicas para El Empleo Racional de La GallinazaWilmer MedinaBelum ada peringkat
- Liderazgo EmpresarialDokumen3 halamanLiderazgo EmpresarialTedy Edler Huaman PuiquinBelum ada peringkat
- Ejercicios Propuestos Potencial ElectricoDokumen4 halamanEjercicios Propuestos Potencial ElectricoyormanBelum ada peringkat
- Laboratorio Método RULADokumen25 halamanLaboratorio Método RULAmanuelBelum ada peringkat
- Staxi-2 CorreciónDokumen4 halamanStaxi-2 CorreciónSoyGabriela PazBelum ada peringkat
- 03 Pasos para Construir Un Diagrama de ParetoDokumen21 halaman03 Pasos para Construir Un Diagrama de ParetoasdfBelum ada peringkat
- T2 MII-U2-Actividad 2.solución de ProblemasDokumen2 halamanT2 MII-U2-Actividad 2.solución de Problemasdhoser20830% (1)
- Cuadro Comparativo Teoria CelularDokumen3 halamanCuadro Comparativo Teoria CelularMayra RamosBelum ada peringkat
- Definición de ForoDokumen2 halamanDefinición de ForoAntonio BetancourtBelum ada peringkat
- Costos Conjuntos y Subproductod-TeoriaDokumen10 halamanCostos Conjuntos y Subproductod-TeoriacarolBelum ada peringkat
- Sesión 1 C y T - El Crecimiento de Las PlantasDokumen6 halamanSesión 1 C y T - El Crecimiento de Las PlantasSaniht RamirezBelum ada peringkat
- Analisis Caso LucatoDokumen16 halamanAnalisis Caso LucatoRichard MoyaBelum ada peringkat
- Taller FinalDokumen6 halamanTaller FinalJose Manuel OrtizBelum ada peringkat
- Introduccion Supervivencia MilitarDokumen11 halamanIntroduccion Supervivencia MilitarJuan CamposBelum ada peringkat
- Carpool ClientesDokumen18 halamanCarpool ClientesOsvaldo De la RosaBelum ada peringkat
- Mapa Mental Del Sindrome de Burnout en Personal de SaludDokumen1 halamanMapa Mental Del Sindrome de Burnout en Personal de SaludAlfred Mendez100% (1)
- Teoria ChallapampaDokumen58 halamanTeoria ChallapampaFreddy Viveros MenachoBelum ada peringkat
- Probl Distribuciones PDFDokumen104 halamanProbl Distribuciones PDFBriones LuisBelum ada peringkat
- Sociologia GeneralDokumen28 halamanSociologia GeneralCelsa Rojas100% (1)
- 2 - Calculo Mecanico BT CAAIDokumen7 halaman2 - Calculo Mecanico BT CAAIMendoza LilianaBelum ada peringkat
- Tarea 2Dokumen2 halamanTarea 2Daniel Morales0% (1)
- Informe HidrometriaDokumen6 halamanInforme HidrometriaLaura M.Belum ada peringkat
- Informe de Lectura Etica ProfesionalDokumen9 halamanInforme de Lectura Etica ProfesionalAna Milena RoldánBelum ada peringkat
- Julio Pre Kinder 2018Dokumen5 halamanJulio Pre Kinder 2018Marietta IllanesBelum ada peringkat