Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Assignment 1 - POMDokumen1 halamanAssignment 1 - POMAneeshGhoshBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Blockchain in HealthDokumen2 halamanBlockchain in HealthAneeshGhoshBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Introduction of Self: Mba746A E-Supply Chain ManagementDokumen5 halamanIntroduction of Self: Mba746A E-Supply Chain ManagementAneeshGhoshBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Study of Value Chain and Value Additive Process of NTFP'S Like Tamarind in Indian States Aneesh Ghosh 20125010 MBADokumen7 halamanStudy of Value Chain and Value Additive Process of NTFP'S Like Tamarind in Indian States Aneesh Ghosh 20125010 MBAAneeshGhoshBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Analysis of Non Timber Forest ProduceDokumen2 halamanAnalysis of Non Timber Forest ProduceAneeshGhoshBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Transaction Block Creation and Validation Source: DeloitteDokumen2 halamanTransaction Block Creation and Validation Source: DeloitteAneeshGhoshBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Scope of NTFPsDokumen1 halamanScope of NTFPsAneeshGhoshBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Basic Value Chain of TamarindDokumen1 halamanBasic Value Chain of TamarindAneeshGhoshBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- XAT Decision Making 2008-16Dokumen43 halamanXAT Decision Making 2008-16Biswajit SahaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Resume - Aneesh GhoshDokumen3 halamanResume - Aneesh GhoshAneeshGhoshBelum ada peringkat
- Assignment 1-7-11 CaseDokumen1 halamanAssignment 1-7-11 CaseAneeshGhoshBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Blockchain in HealthDokumen2 halamanBlockchain in HealthAneeshGhoshBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Assignment NeemDokumen1 halamanAssignment NeemAneeshGhoshBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Assignment NeemDokumen1 halamanAssignment NeemAneeshGhoshBelum ada peringkat
- SIPOC AneeshDokumen3 halamanSIPOC AneeshAneeshGhoshBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- 2020 Market Share Analysis of TCSDokumen1 halaman2020 Market Share Analysis of TCSAneeshGhoshBelum ada peringkat
- COST and REVENUE Estimation For THE PLATFORMDokumen3 halamanCOST and REVENUE Estimation For THE PLATFORMAneeshGhoshBelum ada peringkat
- A Offline: Cost Item 1 Cake: 400 5 2000 Subsidized: 1000Dokumen3 halamanA Offline: Cost Item 1 Cake: 400 5 2000 Subsidized: 1000AneeshGhoshBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Team Members - Anichya Saini - Aneesh Ghosh - Anubhav Singh Rajput - Akshay Kumar - Akash Kapil SinghalDokumen2 halamanTeam Members - Anichya Saini - Aneesh Ghosh - Anubhav Singh Rajput - Akshay Kumar - Akash Kapil SinghalAneeshGhoshBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Case: Nestlé MaggiDokumen7 halamanCase: Nestlé MaggiAneeshGhoshBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- How To Select A Coupling?: Load Motor or Turbine Reciprocating EngineDokumen3 halamanHow To Select A Coupling?: Load Motor or Turbine Reciprocating EngineAneeshGhoshBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Market Valuation of TCS - 2020Dokumen1 halamanMarket Valuation of TCS - 2020AneeshGhoshBelum ada peringkat
- Market Valuation of TCSDokumen1 halamanMarket Valuation of TCSAneeshGhoshBelum ada peringkat
- Aptitude Problems (TCS)Dokumen12 halamanAptitude Problems (TCS)AneeshGhoshBelum ada peringkat
- Aptitude Problems (TCS)Dokumen12 halamanAptitude Problems (TCS)AneeshGhoshBelum ada peringkat
- Assignment 12Dokumen1 halamanAssignment 12AneeshGhoshBelum ada peringkat
- Advances in Biomechanical EngineeringDokumen23 halamanAdvances in Biomechanical EngineeringAneeshGhoshBelum ada peringkat
- Advances in Biomechanical EngineeringDokumen23 halamanAdvances in Biomechanical EngineeringAneeshGhoshBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Celsius-Event List PDFDokumen3 halamanCelsius-Event List PDFAneeshGhoshBelum ada peringkat
- Project ThesisDokumen34 halamanProject ThesisAneeshGhoshBelum ada peringkat
- Adobe Scan Feb 10, 2021Dokumen4 halamanAdobe Scan Feb 10, 2021Filip SalekBelum ada peringkat
- LM4040 Precision Micropower Shunt Voltage Reference: 1 Features 3 DescriptionDokumen60 halamanLM4040 Precision Micropower Shunt Voltage Reference: 1 Features 3 Descriptionmuhamad faizal yaakubBelum ada peringkat
- Class Xi Physics Annual Exam 2017 18Dokumen3 halamanClass Xi Physics Annual Exam 2017 18Anupam TiwariBelum ada peringkat
- Hydraulics Coaching 3Dokumen21 halamanHydraulics Coaching 3lenard dongsal100% (1)
- Herschel 400 2 Log BookDokumen29 halamanHerschel 400 2 Log BookEveraldo FaustinoBelum ada peringkat
- 2 SinteringDokumen70 halaman2 SinteringMohammed Bilal100% (1)
- Compass SurveyingDokumen22 halamanCompass SurveyingCharles Carpo46% (13)
- BC 107Dokumen3 halamanBC 107Sreerag Kunnathu SugathanBelum ada peringkat
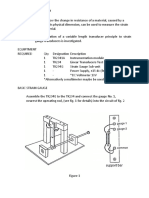
- Strain GuageDokumen6 halamanStrain GuageChristian EspanolBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Science Grade 9: Quarter 4 - Module 6 Heat, Work and EnergyDokumen15 halamanScience Grade 9: Quarter 4 - Module 6 Heat, Work and Energymaesheil computerBelum ada peringkat
- Polymer Melt Indexer (Extrusion Plastometer) PDFDokumen138 halamanPolymer Melt Indexer (Extrusion Plastometer) PDFjrlr65Belum ada peringkat
- M3/M4S3 Statistical Theory Ii The Glivenko-Cantelli Lemma: N X N N, )Dokumen2 halamanM3/M4S3 Statistical Theory Ii The Glivenko-Cantelli Lemma: N X N N, )PubavaBelum ada peringkat
- Helmreich Cut Up Sonic TransductionDokumen9 halamanHelmreich Cut Up Sonic TransductiongrundumBelum ada peringkat
- Terms Detail No - of GB Test NameDokumen80 halamanTerms Detail No - of GB Test NameTarek FennicheBelum ada peringkat
- First-Order Linear Fuzzy Differential Equations On The Space of Linearly Correlated Fuzzy NumbersDokumen33 halamanFirst-Order Linear Fuzzy Differential Equations On The Space of Linearly Correlated Fuzzy NumbersHo Nhat NamBelum ada peringkat
- Chapter1-Propertiesoffluids Semakan2.1Dokumen35 halamanChapter1-Propertiesoffluids Semakan2.1sufi 3393Belum ada peringkat
- Pages From ASME - B31 - 3 - UnlockedDokumen8 halamanPages From ASME - B31 - 3 - UnlockedJose Juan GasparBelum ada peringkat
- Om Asu12r2 FRDokumen19 halamanOm Asu12r2 FRmacdrewBelum ada peringkat
- Introduction To Separation of Oil and WaterDokumen30 halamanIntroduction To Separation of Oil and Waterodracir091865100% (1)
- Usepa - 3051 ADokumen30 halamanUsepa - 3051 Awrangel_2Belum ada peringkat
- Course Structure B.tech.2012-13Dokumen4 halamanCourse Structure B.tech.2012-13fortunatesanjibBelum ada peringkat
- Chapter 3: Kinematics (Average Speed and Velocity) : ObjectivesDokumen4 halamanChapter 3: Kinematics (Average Speed and Velocity) : ObjectivesRuby CocalBelum ada peringkat
- EC &LD-Lab ManualDokumen50 halamanEC &LD-Lab ManualEk naye din ki shuruwat kroBelum ada peringkat
- MSC MathmaticsDokumen24 halamanMSC Mathmaticsyadavgup61Belum ada peringkat
- ALLMENDINGER (1999) Introduction To Structural GeologyDokumen290 halamanALLMENDINGER (1999) Introduction To Structural GeologyeliasBelum ada peringkat
- Hooke's Law Lab ReportDokumen3 halamanHooke's Law Lab ReportNur Syahirah Hanafi75% (4)
- Fmath p2 j99Dokumen6 halamanFmath p2 j99SeanBelum ada peringkat
- GAT - Subject (Electronics)Dokumen14 halamanGAT - Subject (Electronics)Muhammad Sarmad Hafeez100% (3)
- Design of Timber Roof Truss To British Code - Solved Example - StructvilleDokumen9 halamanDesign of Timber Roof Truss To British Code - Solved Example - StructvilleDeRudy100% (3)
- CFBC DesignDokumen28 halamanCFBC DesignThanga Kalyana Sundaravel100% (2)
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®Dari EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Belum ada peringkat
- Certified Solidworks Professional Advanced Weldments Exam PreparationDari EverandCertified Solidworks Professional Advanced Weldments Exam PreparationPenilaian: 5 dari 5 bintang5/5 (1)