Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
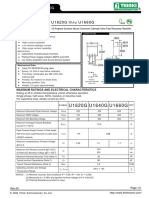
- Datasheet PDFDokumen2 halamanDatasheet PDFEka Hikmah PratiwiBelum ada peringkat
- LG 22lg30r CH Lp81kDokumen29 halamanLG 22lg30r CH Lp81kCristian MaureiraBelum ada peringkat
- Ac Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)Dokumen4 halamanAc Circuit Simulation: i (t) =I sin (ωt) =I si n (2 π f t)M.USMAN BIN AHMEDBelum ada peringkat
- Sanyo - SAP-CRV243GJH - SAP-KCRV243-303 Service ManualDokumen78 halamanSanyo - SAP-CRV243GJH - SAP-KCRV243-303 Service ManualRoberto BottiniBelum ada peringkat
- Control de Nivel Mcdonnell Miller 259Dokumen12 halamanControl de Nivel Mcdonnell Miller 259Appleuk SudarBelum ada peringkat
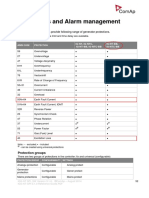
- Pages From IGS-NT-SPI-3.1.0 Reference Guide2Dokumen1 halamanPages From IGS-NT-SPI-3.1.0 Reference Guide2Mohamed MossadBelum ada peringkat
- BMW Trouble CodesDokumen7 halamanBMW Trouble CodesMaría Martz De GarcíaBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen16 halamanDisclosure To Promote The Right To Informationrajpd28Belum ada peringkat
- Auxiliary Potentiometer Model QY9010A1014: GeneralDokumen4 halamanAuxiliary Potentiometer Model QY9010A1014: Generalvubac11Belum ada peringkat
- ETP Control ETMFC610 - Manual - Control Box - Ver1.00Dokumen24 halamanETP Control ETMFC610 - Manual - Control Box - Ver1.00kemalBelum ada peringkat
- 8879 PLS 5watt Manual v65Dokumen16 halaman8879 PLS 5watt Manual v65ravi kumarBelum ada peringkat
- Wa0008.Dokumen3 halamanWa0008.info.sanjudcontractorsltdBelum ada peringkat
- ABB-Motor Unbalance Voltage SupplyDokumen5 halamanABB-Motor Unbalance Voltage SupplyZaini DalimusBelum ada peringkat
- TLZJ23022844586Dokumen13 halamanTLZJ23022844586alonsoBelum ada peringkat
- Healthstream Regulatory Script: Electrical SafetyDokumen47 halamanHealthstream Regulatory Script: Electrical SafetyzahirBelum ada peringkat
- Science-9 Q4 W7 D2Dokumen5 halamanScience-9 Q4 W7 D2Johnrey PovadoraBelum ada peringkat
- General NotesDokumen8 halamanGeneral NotesPradeesh Vijayan (v.prathi)100% (2)
- Key Words: Ampere's Law, Field Due To Solenoid, Current Sheet,. ProblemsDokumen19 halamanKey Words: Ampere's Law, Field Due To Solenoid, Current Sheet,. ProblemsKarla delarosaBelum ada peringkat
- drv8662 DatasheetDokumen19 halamandrv8662 DatasheetshibasholmarcBelum ada peringkat
- HA16129FPJ: Single Watchdog TimerDokumen24 halamanHA16129FPJ: Single Watchdog TimerMichael PorterBelum ada peringkat
- Ic LedDokumen7 halamanIc LedDokter LampuBelum ada peringkat
- Ratings GuideDokumen36 halamanRatings Guidegigo_dream0% (1)
- Himel Solar - VSDDokumen9 halamanHimel Solar - VSDAbdullah TalibBelum ada peringkat
- Ua 78 L 05 ADokumen27 halamanUa 78 L 05 AJoseph BernardBelum ada peringkat
- Lecture 1 Introduction To DC Motor DrivesDokumen22 halamanLecture 1 Introduction To DC Motor DrivesNovic JohnsBelum ada peringkat
- Adaptive Algorithm For Calibration of Array CoefficientsDokumen8 halamanAdaptive Algorithm For Calibration of Array CoefficientsIJAET JournalBelum ada peringkat
- PHY p160Dokumen17 halamanPHY p160Harshit KhardiaBelum ada peringkat
- Template B - EPC Quotation For Solar PV Installation (23.10.2015)Dokumen3 halamanTemplate B - EPC Quotation For Solar PV Installation (23.10.2015)Shiva KiranBelum ada peringkat
- SFT ManualDokumen21 halamanSFT Manuallucas asdBelum ada peringkat
- BOM - 6.6kV Switchboard (R3)Dokumen1 halamanBOM - 6.6kV Switchboard (R3)sparkCEBelum ada peringkat