Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- EC8702 Adhoc SyllabusDokumen3 halamanEC8702 Adhoc SyllabusThahsin ThahirBelum ada peringkat
- EC8702 Adhoc Syllabus PDFDokumen3 halamanEC8702 Adhoc Syllabus PDFThahsin Thahir100% (1)
- Lab ManualDokumen66 halamanLab ManualThahsin ThahirBelum ada peringkat
- Lecturer in Ec PSC SyllabusDokumen7 halamanLecturer in Ec PSC SyllabusThahsin ThahirBelum ada peringkat
- Unit 4 Satellite AccessDokumen23 halamanUnit 4 Satellite AccessThahsin ThahirBelum ada peringkat
- Delta ConnectionDokumen4 halamanDelta ConnectionThahsin ThahirBelum ada peringkat
- Blooms TaxonomyDokumen1 halamanBlooms TaxonomysivaeeinfoBelum ada peringkat
- ANNA UNIVERSITY AUTOMOTIVE ENGINEERING CURRICULUMDokumen95 halamanANNA UNIVERSITY AUTOMOTIVE ENGINEERING CURRICULUMpavanraneBelum ada peringkat
- Wireless Communication Lesson Plan PDFDokumen7 halamanWireless Communication Lesson Plan PDFThahsin ThahirBelum ada peringkat
- Digital Communications Lab MannualDokumen74 halamanDigital Communications Lab MannualwizardvenkatBelum ada peringkat
- VLSIDokumen65 halamanVLSIChandrashekarBelum ada peringkat
- Basic Shift AccumulatorDokumen4 halamanBasic Shift AccumulatorThahsin ThahirBelum ada peringkat
- Convolutional Code (II)Dokumen115 halamanConvolutional Code (II)Atef Al-Kotafi Al-AbdiBelum ada peringkat
- EC6601 VLSI Design Question BankDokumen11 halamanEC6601 VLSI Design Question BankThahsin ThahirBelum ada peringkat
- 7.processing GainDokumen1 halaman7.processing GainThahsin ThahirBelum ada peringkat
- Digital Communications Lab MannualDokumen74 halamanDigital Communications Lab MannualwizardvenkatBelum ada peringkat
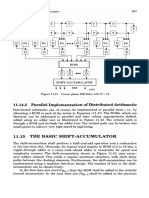
- 12.4 FFT PROCESSOR, Cont. 545Dokumen7 halaman12.4 FFT PROCESSOR, Cont. 545Thahsin ThahirBelum ada peringkat
- M.E.VLSI DesignDokumen43 halamanM.E.VLSI DesignThahsin ThahirBelum ada peringkat
- Digital Communications by J.S.chitodeDokumen186 halamanDigital Communications by J.S.chitodeBabulal Meena83% (52)
- Notes1 PDFDokumen95 halamanNotes1 PDFThahsin ThahirBelum ada peringkat
- 20 Course BrochureDokumen2 halaman20 Course BrochureThahsin ThahirBelum ada peringkat
- M.E.VLSI Regulation 2013Dokumen30 halamanM.E.VLSI Regulation 2013Vijayaraghavan V0% (1)
- Digital Communication System Part A (2 Marks) : UNIT-1Dokumen3 halamanDigital Communication System Part A (2 Marks) : UNIT-1parthidhanBelum ada peringkat
- SIMULATION OF DIGITAL MODULATION TECHNIQUESDokumen19 halamanSIMULATION OF DIGITAL MODULATION TECHNIQUESThahsin ThahirBelum ada peringkat
- Study of Analog to Digital and Digital to Analog Converters (ADC and DACDokumen3 halamanStudy of Analog to Digital and Digital to Analog Converters (ADC and DACThahsin ThahirBelum ada peringkat
- SyllabusDokumen118 halamanSyllabusecessecBelum ada peringkat
- Moore and Mealy MachinesDokumen5 halamanMoore and Mealy MachinesThahsin ThahirBelum ada peringkat
- The Hindu Review 1st To 31st December Complete by Gopal SirDokumen17 halamanThe Hindu Review 1st To 31st December Complete by Gopal SirThahsin ThahirBelum ada peringkat
- Inverter With Tanner Tools PDFDokumen76 halamanInverter With Tanner Tools PDFSijo MathewBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- IITG MA101 Endsem Question PaperDokumen12 halamanIITG MA101 Endsem Question PaperNarravula Harshavardhan100% (2)
- Medium Strength High Conductivity MaterialsDokumen37 halamanMedium Strength High Conductivity MaterialsNut AssanaiBelum ada peringkat
- Principle Harmony RhythmDokumen16 halamanPrinciple Harmony RhythmRosalinda PanopioBelum ada peringkat
- Rincon Dueling RigbyDokumen5 halamanRincon Dueling Rigbytootalldean100% (1)
- 2021 - Tet Purchase Behavior Report - INFOCUSDokumen15 halaman2021 - Tet Purchase Behavior Report - INFOCUSGame AccountBelum ada peringkat
- The Dedication of the Broken Hearted SailorDokumen492 halamanThe Dedication of the Broken Hearted SailorGabriele TorresBelum ada peringkat
- Power Tube Biasing Operation Manual 15-01-08Dokumen2 halamanPower Tube Biasing Operation Manual 15-01-08MitchBelum ada peringkat
- Gene Regulation: Made By: Diana Alhazzaa Massah AlhazzaaDokumen17 halamanGene Regulation: Made By: Diana Alhazzaa Massah AlhazzaaAmora HZzBelum ada peringkat
- Print Date:: Container No NO Size Seal No Seal Party Supplier Status Movement TypeDokumen3 halamanPrint Date:: Container No NO Size Seal No Seal Party Supplier Status Movement TypeYudha PermanaBelum ada peringkat
- Abiotic and Biotic Factors DFDokumen2 halamanAbiotic and Biotic Factors DFgiselleBelum ada peringkat
- Art-App-Module-12 Soulmaking, Improvisation, Installation, & TranscreationDokumen4 halamanArt-App-Module-12 Soulmaking, Improvisation, Installation, & TranscreationJohn Mark D. RoaBelum ada peringkat
- Year 5:: NUMBERS TO 1 000 000Dokumen47 halamanYear 5:: NUMBERS TO 1 000 000Rusehaiza Bin Md DarusBelum ada peringkat
- 5s OfficeDokumen10 halaman5s OfficeTechie InblueBelum ada peringkat
- Deforestation Management System Using Force and SoundDokumen4 halamanDeforestation Management System Using Force and SoundManeesh SvsBelum ada peringkat
- DGPS Sensor JLR-4331W Instruction ManualDokumen42 halamanDGPS Sensor JLR-4331W Instruction ManualantonioBelum ada peringkat
- OE Spec MTU16V4000DS2250 3B FC 50Hz 1 18Dokumen6 halamanOE Spec MTU16V4000DS2250 3B FC 50Hz 1 18Rizki Heru HermawanBelum ada peringkat
- UPSC IFS Botany Syllabus: Paper - IDokumen3 halamanUPSC IFS Botany Syllabus: Paper - IVikram Singh ChauhanBelum ada peringkat
- Very Low Altitude Drag-Free Satellites: R D UpdatesDokumen5 halamanVery Low Altitude Drag-Free Satellites: R D Updatesraa2010Belum ada peringkat
- GE - Oil Sheen Detection, An Alternative To On-Line PPM AnalyzersDokumen2 halamanGE - Oil Sheen Detection, An Alternative To On-Line PPM AnalyzersjorgegppBelum ada peringkat
- Common Herbs and Foods Used As Galactogogues PDFDokumen4 halamanCommon Herbs and Foods Used As Galactogogues PDFHadi El-MaskuryBelum ada peringkat
- Gante Iris PPT Pe p006Dokumen20 halamanGante Iris PPT Pe p006Donna Ville GanteBelum ada peringkat
- Sundar KandvalmikiDokumen98 halamanSundar Kandvalmikifactree09Belum ada peringkat
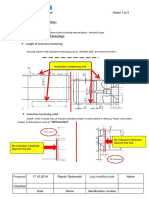
- Induction Hardening - Interpretation of Drawing & Testing PDFDokumen4 halamanInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHBelum ada peringkat
- REMEDIATION-Focus BDokumen13 halamanREMEDIATION-Focus BCharmaine PerioBelum ada peringkat
- Introduction 3-12-86Dokumen13 halamanIntroduction 3-12-86Roshdy AbdelRassoulBelum ada peringkat
- Allen Bradley Power Monitor 3000 Manual PDFDokumen356 halamanAllen Bradley Power Monitor 3000 Manual PDFAndrewcaesar100% (1)
- Regenerative Medicine Manual ISSCA 2020 EnglishDokumen21 halamanRegenerative Medicine Manual ISSCA 2020 EnglishDana MihutBelum ada peringkat
- Daftar Harga Airway PT. Surgika 2017Dokumen16 halamanDaftar Harga Airway PT. Surgika 2017Syaofi SofiBelum ada peringkat
- Schaeffler - Account Insights - Mar 2020Dokumen13 halamanSchaeffler - Account Insights - Mar 2020mohit negiBelum ada peringkat
- Spin - 2021Dokumen60 halamanSpin - 2021Tanel LaanemägiBelum ada peringkat