Anda mungkin juga menyukai
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDari EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaBelum ada peringkat
- Preamplificador Con Amplificador OperacionalDokumen1 halamanPreamplificador Con Amplificador OperacionalDaniela Cardenas LuboBelum ada peringkat
- Trabajo de Opams2Dokumen60 halamanTrabajo de Opams2Naracu Fabian100% (1)
- Osciladores de CristalDokumen13 halamanOsciladores de CristalPablo QuichimboBelum ada peringkat
- Generar Señal PWM para Servo Con AVR ATmega328pDokumen9 halamanGenerar Señal PWM para Servo Con AVR ATmega328pPierDonneeBelum ada peringkat
- Teclado Matricial 4x4 Con El PIC16F877ADokumen4 halamanTeclado Matricial 4x4 Con El PIC16F877AELPICHUEBelum ada peringkat
- PC Cuadrada Pulsos Multiples UnipolarDokumen51 halamanPC Cuadrada Pulsos Multiples Unipolarbryan eduardo villegas carrascoBelum ada peringkat
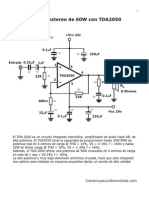
- Amplificador 60w Con Tda2050Dokumen8 halamanAmplificador 60w Con Tda2050david100% (1)
- Filtros Electricos PasivosDokumen7 halamanFiltros Electricos PasivosMarianaBelum ada peringkat
- Lab05 Fibra Optica - TDM-PCMDokumen7 halamanLab05 Fibra Optica - TDM-PCMHuber Jhonatan EscobedoBelum ada peringkat
- Sumador Con and Xor orDokumen13 halamanSumador Con and Xor orIvan Crispin PaucarBelum ada peringkat
- Amplificador de Audio Ampliable en PotenciaDokumen8 halamanAmplificador de Audio Ampliable en PotenciaCarlos ToMenBelum ada peringkat
- Design To OscilatorDokumen55 halamanDesign To Oscilatorroymer lopez100% (3)
- Control Difuso de Un Motor DC Implementado en Un MicrocontroladorDokumen9 halamanControl Difuso de Un Motor DC Implementado en Un MicrocontroladorpctronikgarciaBelum ada peringkat
- Antenas y Guias de OndasDokumen27 halamanAntenas y Guias de OndasEmily Rojas100% (1)
- Fourier Laminas USBDokumen24 halamanFourier Laminas USBStark JohnBelum ada peringkat
- Amplificador OpampDokumen5 halamanAmplificador OpampfacundoBelum ada peringkat
- Espacio de EstadosDokumen18 halamanEspacio de EstadosCristian AndradeBelum ada peringkat
- Amplificador Colector ComunDokumen13 halamanAmplificador Colector ComunJorge Leonardo CamachoBelum ada peringkat
- Practica 3 Reporte Amplificadores OperacionalesDokumen13 halamanPractica 3 Reporte Amplificadores OperacionalesJose Miguel RasgadoBelum ada peringkat
- Ejer PropuestosDokumen6 halamanEjer PropuestosRicardo BarrionuevoBelum ada peringkat
- Proyecto CarritoDokumen8 halamanProyecto CarritoMelba EstrellaBelum ada peringkat
- Distintos Tipos de Convertidores Análogos y DigitalesDokumen4 halamanDistintos Tipos de Convertidores Análogos y DigitalesAlber Lim GboBelum ada peringkat
- Practica de Control Digital Espol - Tiempos de MuestreoDokumen9 halamanPractica de Control Digital Espol - Tiempos de MuestreoAndres Ante VargasBelum ada peringkat
- AmplificdorDokumen8 halamanAmplificdorjosevicentejv_92Belum ada peringkat
- Filtrado PWMDokumen3 halamanFiltrado PWMBernardo Cristobal AguilarBelum ada peringkat
- Ensayo Tipos de OsciladoresDokumen17 halamanEnsayo Tipos de OsciladoresMiguel Angel Flores MojicaBelum ada peringkat
- Diseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.Dokumen12 halamanDiseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.hhryc7100% (3)
- Practica 6Dokumen21 halamanPractica 6Rafael Coxca GutiérrezBelum ada peringkat
- Practica 3 Display LCD MicroprocesadoresDokumen10 halamanPractica 3 Display LCD MicroprocesadoresEdward MedinaBelum ada peringkat
- Informe DC-DC ReductorDokumen9 halamanInforme DC-DC ReductorWilliam Tamayo100% (1)
- Regulador de Voltaje Con Carga (Jfet K30)Dokumen5 halamanRegulador de Voltaje Con Carga (Jfet K30)PieroA.VillagarayVillagarayBelum ada peringkat
- Control Pid DiscretoDokumen8 halamanControl Pid DiscretoDanny Ochoa Correa100% (4)
- ADC - LCD (PIC18f4550)Dokumen3 halamanADC - LCD (PIC18f4550)Israel Mendoza VelázquezBelum ada peringkat
- Modulos PWM para Control de MotoresDokumen8 halamanModulos PWM para Control de MotoresWesther Eduardo ABelum ada peringkat
- Pid de TemperaturaDokumen10 halamanPid de TemperaturaROMINABelum ada peringkat
- Sistemas de Control Utp PDFDokumen11 halamanSistemas de Control Utp PDFAlexander Castillo MaytaBelum ada peringkat
- Tecnologia de Dispositivos de Potencia 2014Dokumen57 halamanTecnologia de Dispositivos de Potencia 2014Walter JacquetBelum ada peringkat
- Fibra Óptica de Bragg - Sensor de DeformaciónDokumen99 halamanFibra Óptica de Bragg - Sensor de DeformaciónMario Alejandro Sime OdarBelum ada peringkat
- Matlab Laboratorio 2Dokumen21 halamanMatlab Laboratorio 2Gilmer Jose Vizcarra AvilaBelum ada peringkat
- La Transformada de FourierDokumen15 halamanLa Transformada de FourierFelipeBelum ada peringkat
- EXPERIMENTO 13 (PCM-Decoding) PDFDokumen9 halamanEXPERIMENTO 13 (PCM-Decoding) PDFBetsabet Liz Bala RomeroBelum ada peringkat
- Practica 3. Espacio de EstadoDokumen21 halamanPractica 3. Espacio de EstadoLUISBelum ada peringkat
- Filtro Pasa BajosDokumen34 halamanFiltro Pasa BajosYonathan GarcíaBelum ada peringkat
- Preguntas Del Libro TomasiDokumen8 halamanPreguntas Del Libro TomasiFernxndo BxsxntesBelum ada peringkat
- S09 - Transistor en Corte y Saturación.Dokumen27 halamanS09 - Transistor en Corte y Saturación.nico francoBelum ada peringkat
- 3332 S Tecnología de Automatización Con Siemens PLCDokumen123 halaman3332 S Tecnología de Automatización Con Siemens PLCOmar Curo PariBelum ada peringkat
- Reporte PWMDokumen9 halamanReporte PWMMoises EsquivelBelum ada peringkat
- Reporte de Seguidor de LineaDokumen10 halamanReporte de Seguidor de LineaRaymond KenneyBelum ada peringkat
- Levitador Magnetico Teoria ControlDokumen12 halamanLevitador Magnetico Teoria Controlmikrosurfer3508Belum ada peringkat
- Caracterización de Un Sensor InductivoDokumen4 halamanCaracterización de Un Sensor InductivoMauricio AgudeloBelum ada peringkat
- Principios del análisis de Fourier: Variaciones sobre un tema clásicoDari EverandPrincipios del análisis de Fourier: Variaciones sobre un tema clásicoBelum ada peringkat
- Telecomunicaciones: Historia y conceptos básicosDari EverandTelecomunicaciones: Historia y conceptos básicosPenilaian: 5 dari 5 bintang5/5 (1)
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloDari EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloBelum ada peringkat
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDari EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadBelum ada peringkat
- Proyecto de Catedra Suspension MagenticoDokumen14 halamanProyecto de Catedra Suspension MagenticocarlosBelum ada peringkat
- LevitacionDokumen18 halamanLevitacionLuis Edo Garcia JaimesBelum ada peringkat
- Taller No 9 UDI A2011Dokumen25 halamanTaller No 9 UDI A2011misusibuBelum ada peringkat
- Crear Base de Datos EERDokumen6 halamanCrear Base de Datos EERmisusibuBelum ada peringkat
- 1 Paper Control AvanzadoDokumen6 halaman1 Paper Control AvanzadomisusibuBelum ada peringkat
- Filtro DigitalDokumen4 halamanFiltro DigitalmisusibuBelum ada peringkat
- Instrumentacion Tema5bDokumen45 halamanInstrumentacion Tema5bManuel Alejandro KortesBelum ada peringkat
- Guia 1Dokumen6 halamanGuia 1misusibuBelum ada peringkat
- Transformada Z InversaDokumen31 halamanTransformada Z InversaAurelio VargasBelum ada peringkat
- Termistores y FotoresistenciasDokumen16 halamanTermistores y FotoresistenciasmisusibuBelum ada peringkat
- Configuracion Mad11Dokumen1 halamanConfiguracion Mad11misusibuBelum ada peringkat
- Termistores y FotoresistenciasDokumen16 halamanTermistores y FotoresistenciasmisusibuBelum ada peringkat
- TermoparesDokumen17 halamanTermoparesmisusibuBelum ada peringkat
- Protocolo de ComunicacionDokumen3 halamanProtocolo de ComunicacionmisusibuBelum ada peringkat
- Grados de LibertadDokumen12 halamanGrados de Libertadmisusibu50% (2)
- Sintonizacion de Controladores (Informe Ieee)Dokumen8 halamanSintonizacion de Controladores (Informe Ieee)misusibuBelum ada peringkat
- Proyecto FinalDokumen10 halamanProyecto FinalmisusibuBelum ada peringkat
- Radioenlace Terrestre (Informe Ieee)Dokumen6 halamanRadioenlace Terrestre (Informe Ieee)misusibuBelum ada peringkat
- Brazo Hidraulico - Proyecto de CienciasDokumen21 halamanBrazo Hidraulico - Proyecto de CienciasÐệnnïs RǿmerǿBelum ada peringkat
- Analisis Cinematico Scara (Informe Ieee) .1 PDFDokumen8 halamanAnalisis Cinematico Scara (Informe Ieee) .1 PDFmisusibuBelum ada peringkat
- Identificación de Sistemas SYM1Dokumen89 halamanIdentificación de Sistemas SYM1Jorge Andres Moreno JaimesBelum ada peringkat
- Transformada Z (Informe Ieee) .1Dokumen6 halamanTransformada Z (Informe Ieee) .1misusibuBelum ada peringkat
- TermoparesDokumen17 halamanTermoparesmisusibuBelum ada peringkat
- Lecturas DipolosDokumen2 halamanLecturas DipolosmisusibuBelum ada peringkat
- Corrección SISOTOOLDokumen3 halamanCorrección SISOTOOLmisusibuBelum ada peringkat
- P 07Dokumen14 halamanP 07Jackeline Pariona GomezBelum ada peringkat
- Ponderación LinealDokumen3 halamanPonderación LinealvirginiaBelum ada peringkat
- Tarea 1 RRHHDokumen7 halamanTarea 1 RRHHIsmaelBelum ada peringkat
- Semana 01 - Introdución A Las Ciencias JurídicasDokumen9 halamanSemana 01 - Introdución A Las Ciencias JurídicasDamaris Adrianzen FloresBelum ada peringkat
- Sesión de Aprendizaje 03 - 5to GradoDokumen5 halamanSesión de Aprendizaje 03 - 5to GradoNancy Bances Gelacio100% (2)
- Resumen Tema 3Dokumen9 halamanResumen Tema 3Mary GRBelum ada peringkat
- Estudio Sobre La Obra El Señor PresidenteDokumen6 halamanEstudio Sobre La Obra El Señor Presidentenormmriv100% (2)
- Diseño Del Lugar de TrabajoDokumen21 halamanDiseño Del Lugar de TrabajoJorge_standBelum ada peringkat
- Ingenieria en NanotecnologiaDokumen16 halamanIngenieria en NanotecnologiaAlia SabasBelum ada peringkat
- Yo Robot BDokumen9 halamanYo Robot BCarlos BarrientosBelum ada peringkat
- Resumen Narrativo de ObjetivosDokumen3 halamanResumen Narrativo de ObjetivospadillaBelum ada peringkat
- TemaseiDokumen441 halamanTemaseiAndrés Felipe GutiérrezBelum ada peringkat
- DBD - Decembre 2017Dokumen124 halamanDBD - Decembre 2017LEONARDO HERNAN LAZCANO ABRIGOBelum ada peringkat
- Espa A No Cuida A Sus Cient FicosDokumen3 halamanEspa A No Cuida A Sus Cient Ficoshugo garridoBelum ada peringkat
- Prueba 1 Semestral Ciencias 4°Dokumen8 halamanPrueba 1 Semestral Ciencias 4°Yesica Vargas AlvaradoBelum ada peringkat
- Daniel Peñailillo - Los Bienes, La Propiedad y Otros Derechos RealesDokumen128 halamanDaniel Peñailillo - Los Bienes, La Propiedad y Otros Derechos RealesMiguelToroS86% (43)
- 0707618Dokumen127 halaman0707618ARMANDOBelum ada peringkat
- Inflación: Lineas de Pobreza e Indigencia CabaDokumen4 halamanInflación: Lineas de Pobreza e Indigencia CabaBAE NegociosBelum ada peringkat
- Reglamento General de Titulación UanlDokumen7 halamanReglamento General de Titulación UanlHans KrakaurBelum ada peringkat
- Norma ApaDokumen37 halamanNorma Apajulio.hidalgo.frBelum ada peringkat
- Características de La Buena Redacción WikiDokumen2 halamanCaracterísticas de La Buena Redacción WikiAimara MorenoBelum ada peringkat
- Horario I Ciclo 2021-2Dokumen29 halamanHorario I Ciclo 2021-2Wilper Maurilio Faya CastroBelum ada peringkat
- P6 Capacidad PDFDokumen11 halamanP6 Capacidad PDFDavidBelum ada peringkat
- Efecto CORONADokumen54 halamanEfecto CORONAPaulo CamposBelum ada peringkat
- Como Ser Un Lider ExitosoDokumen2 halamanComo Ser Un Lider ExitosoDiegoPanchoLopezBelum ada peringkat
- Guia Ejercitacion NumerosDokumen18 halamanGuia Ejercitacion NumerostrtrtertrtrBelum ada peringkat
- Protocolo de Actuación Ante La Disrupción en El AulaDokumen38 halamanProtocolo de Actuación Ante La Disrupción en El AulaLesslye SarahiBelum ada peringkat
- Prestacion Caso Trabajo y Tiempo en El Siglo XXIDokumen11 halamanPrestacion Caso Trabajo y Tiempo en El Siglo XXIAlba TorrezBelum ada peringkat
- Estabilidad de Medio AmbienteDokumen2 halamanEstabilidad de Medio AmbienteMiguel OrtegaBelum ada peringkat
- Urbanismo en Cuenca Trazas y Todo PDFDokumen141 halamanUrbanismo en Cuenca Trazas y Todo PDFcarlosBelum ada peringkat
- Cinco Leyendas de Amor Alrededor Del MundoDokumen2 halamanCinco Leyendas de Amor Alrededor Del MundoHaugaardHaugaard02Belum ada peringkat