Anda mungkin juga menyukai
- Proyecto Motores de Combustión InternaDokumen14 halamanProyecto Motores de Combustión InternaAndres LópezBelum ada peringkat
- TeslalectureDokumen53 halamanTeslalectureapi-252712632Belum ada peringkat
- IntroducciónDokumen1 halamanIntroducciónAndres LópezBelum ada peringkat
- Proyecto MaquinariaDokumen14 halamanProyecto MaquinariaAndres LópezBelum ada peringkat
- Regla Tres Simple Directa InversaDokumen5 halamanRegla Tres Simple Directa Inversaprofe.alex86% (7)
- EXAMEN DiseñoDokumen14 halamanEXAMEN DiseñoAndres LópezBelum ada peringkat
- Informe Proyecto 2014 de MatematicasDokumen2 halamanInforme Proyecto 2014 de MatematicasAndres LópezBelum ada peringkat
- OD 1. Introduccion, Historia, OrganismosDokumen40 halamanOD 1. Introduccion, Historia, OrganismosAndres LópezBelum ada peringkat
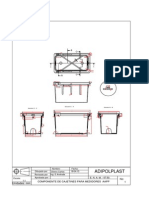
- Cajetines para Medidores de Aapp 1Dokumen1 halamanCajetines para Medidores de Aapp 1Andres LópezBelum ada peringkat
- Principios de TorneadoDokumen27 halamanPrincipios de TorneadoRoberto ParadaBelum ada peringkat
- Practica ElectronicaDokumen8 halamanPractica ElectronicaAndres LópezBelum ada peringkat
- CapacitanciaDokumen2 halamanCapacitanciaAndres LópezBelum ada peringkat
- Practica 2Dokumen5 halamanPractica 2William MontalvoBelum ada peringkat
- TeslalectureDokumen53 halamanTeslalectureapi-252712632Belum ada peringkat
- Clase Opamp Timer555Dokumen48 halamanClase Opamp Timer555Andres LópezBelum ada peringkat
- Informe - XI - Transform Adores 1Dokumen5 halamanInforme - XI - Transform Adores 1Andres LópezBelum ada peringkat
- Cálculo IIDokumen47 halamanCálculo IIMiguel Flores100% (16)
- Caida LibreDokumen1 halamanCaida LibreNelson ChiribogaBelum ada peringkat
- Informe ControladorDokumen23 halamanInforme ControladorOmar ArguelloBelum ada peringkat
- Sistema de Levitacion Neumatica PDFDokumen146 halamanSistema de Levitacion Neumatica PDFMonickafer100% (1)
- Qué Es HARTDokumen27 halamanQué Es HARTCesar LlojllaBelum ada peringkat
- Automatas Programables A. Aguinaga PDFDokumen107 halamanAutomatas Programables A. Aguinaga PDFMariela BelénBelum ada peringkat
- Sistemas de Control RetroalimentadoDokumen24 halamanSistemas de Control RetroalimentadoPelayo RodrigoBelum ada peringkat
- Trabajo Elimines 2Dokumen22 halamanTrabajo Elimines 2Naciret LópezBelum ada peringkat
- Introducción A Los Sistemas No LinealesDokumen20 halamanIntroducción A Los Sistemas No LinealesAndrea MorenoBelum ada peringkat
- Control Directo DigitalDokumen7 halamanControl Directo DigitalAndrésNavarroQuinteroBelum ada peringkat
- 20 Preguntas de ControlDokumen24 halaman20 Preguntas de ControlNicshaSNRRBelum ada peringkat
- Proyecto de Instalación de Suministro de Agua y Producción de A.C.S. Mediante Energía Solar Térmica Con Apoyo de Energía ConvencionalDokumen550 halamanProyecto de Instalación de Suministro de Agua y Producción de A.C.S. Mediante Energía Solar Térmica Con Apoyo de Energía ConvencionalJan6969Belum ada peringkat
- CAPITULO 2 ModificadoDokumen48 halamanCAPITULO 2 ModificadoJhoan Sebastián Henao MorenoBelum ada peringkat
- Error en Estado Estacionario PDFDokumen40 halamanError en Estado Estacionario PDFTere Barreto GutierrezBelum ada peringkat
- Taller Control Digital PDFDokumen4 halamanTaller Control Digital PDFOmar QuispeBelum ada peringkat
- El Control Fiscal Como Función de Naturaleza NormativaDokumen2 halamanEl Control Fiscal Como Función de Naturaleza NormativaEstudianteBujosaBelum ada peringkat
- Ciencias Ambientales Problemas de Contaminacion Del Aire PDFDokumen36 halamanCiencias Ambientales Problemas de Contaminacion Del Aire PDFDiemer Muñoz PerezBelum ada peringkat
- Sistemas de Control y Transformada de LaplaceDokumen44 halamanSistemas de Control y Transformada de Laplacejorgematinez0% (1)
- Portafolio U 2 Jesús Antonio Sánchez ZuritaDokumen35 halamanPortafolio U 2 Jesús Antonio Sánchez Zuritajesus antonio sanchezBelum ada peringkat
- Informe Laboratorio Control AnalógicoDokumen7 halamanInforme Laboratorio Control AnalógicoCristhian BolivarBelum ada peringkat
- Boletin # 3 Diferencia Entre Dos Vias y Tres ViasDokumen4 halamanBoletin # 3 Diferencia Entre Dos Vias y Tres ViasSCERVANTESLUISBelum ada peringkat
- Control de Motores IEEEDokumen10 halamanControl de Motores IEEEJesús DugarteBelum ada peringkat
- Asignación 4 Circuitos Degitales Torres Jocxe 194805 PN21-04Dokumen12 halamanAsignación 4 Circuitos Degitales Torres Jocxe 194805 PN21-04Jocxe TorrezBelum ada peringkat
- Syllabus de Control II 2015-IDokumen5 halamanSyllabus de Control II 2015-IQC JorgBelum ada peringkat
- IInda Leccion Ventajas de La RetroalimentacionDokumen28 halamanIInda Leccion Ventajas de La RetroalimentacionMonica MolinaBelum ada peringkat
- Trabajo Cáculo Diferencial Eje 2Dokumen24 halamanTrabajo Cáculo Diferencial Eje 2Simón León VelandiaBelum ada peringkat
- Análisis de Sistemas Realimentados en El TiempoDokumen12 halamanAnálisis de Sistemas Realimentados en El TiempoRaúl GutiérrezBelum ada peringkat
- Control Clasico Vs Control ModernoDokumen3 halamanControl Clasico Vs Control ModernoManuel Guzman Sandoval100% (2)
- ISA - Programa Control e Instrumentación de Procesos QuímicosDokumen2 halamanISA - Programa Control e Instrumentación de Procesos QuímicosJehiel AlvarezBelum ada peringkat
- Unidad 1 Control PDFDokumen8 halamanUnidad 1 Control PDFAdrian Yovanny Gomez DesiderioBelum ada peringkat
- Aplicaciones de La Transformada de Laplace en La IngenieriaDokumen6 halamanAplicaciones de La Transformada de Laplace en La IngenieriaAnimesfansWeb33% (3)