Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- DR 900 Fluoride Catalog-CompressedDokumen2 halamanDR 900 Fluoride Catalog-CompressedTheepa SubramaniamBelum ada peringkat
- Road SafetyDokumen3 halamanRoad SafetyTheepa SubramaniamBelum ada peringkat
- Material Balance ADokumen8 halamanMaterial Balance ATheepa SubramaniamBelum ada peringkat
- Wim BleachingDokumen31 halamanWim BleachingSantiago TuestaBelum ada peringkat
- Water: Modeling and Optimization of New Flocculant Dosage and PH For Flocculation: Removal of Pollutants From WastewaterDokumen14 halamanWater: Modeling and Optimization of New Flocculant Dosage and PH For Flocculation: Removal of Pollutants From WastewaterTheepa SubramaniamBelum ada peringkat
- Wim BleachingDokumen31 halamanWim BleachingSantiago TuestaBelum ada peringkat
- Project Application Report Client'S Information ListDokumen7 halamanProject Application Report Client'S Information ListTheepa SubramaniamBelum ada peringkat
- Contemporary Challenges PDFDokumen6 halamanContemporary Challenges PDFTheepa SubramaniamBelum ada peringkat
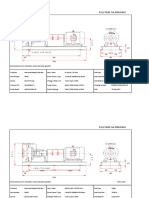
- GA Drawings of Industrial PumpsDokumen9 halamanGA Drawings of Industrial PumpsTheepa SubramaniamBelum ada peringkat
- Bleaching Effect On Palm OilDokumen239 halamanBleaching Effect On Palm Oilde eagle100% (6)
- Determination of The Optimal Process Conditions For The Acid Activation of Ngwo Clay in The Bleaching of Palm OilDokumen13 halamanDetermination of The Optimal Process Conditions For The Acid Activation of Ngwo Clay in The Bleaching of Palm OilInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Determination of The Optimal Process Conditions For The Acid Activation of Ngwo Clay in The Bleaching of Palm OilDokumen13 halamanDetermination of The Optimal Process Conditions For The Acid Activation of Ngwo Clay in The Bleaching of Palm OilInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Heat Integration: Dr. Rajashekhar PendyalaDokumen36 halamanHeat Integration: Dr. Rajashekhar PendyalaTheepa SubramaniamBelum ada peringkat
- Heat Integration: Pinch Method and Network DesignDokumen38 halamanHeat Integration: Pinch Method and Network DesignTheepa SubramaniamBelum ada peringkat
- Heat Integration: Capital Cost TargetingDokumen18 halamanHeat Integration: Capital Cost TargetingTheepa SubramaniamBelum ada peringkat
- Economic EvaluationDokumen31 halamanEconomic EvaluationTheepa SubramaniamBelum ada peringkat
- Automated Design of Heat Exchanger Networks Using Block Decomposition and Simplified SuperstructuresDokumen23 halamanAutomated Design of Heat Exchanger Networks Using Block Decomposition and Simplified SuperstructuresTheepa SubramaniamBelum ada peringkat
- Practice Problems BDokumen14 halamanPractice Problems BTheepa SubramaniamBelum ada peringkat
- Placement of EquipmentDokumen11 halamanPlacement of Equipmentatiyorockfan9017Belum ada peringkat
- Economic EvaluationDokumen31 halamanEconomic EvaluationTheepa SubramaniamBelum ada peringkat
- Biomass As Low-Cost AdsorbentsDokumen15 halamanBiomass As Low-Cost AdsorbentsTheepa SubramaniamBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- SDM Vol 1 2abcd 3abcdDokumen4.778 halamanSDM Vol 1 2abcd 3abcdfliphellBelum ada peringkat
- New Product Developmen1Dokumen5 halamanNew Product Developmen1srvjeetBelum ada peringkat
- PTO's : Questionnaire For New Parts ListDokumen1 halamanPTO's : Questionnaire For New Parts ListAbhishek kumarBelum ada peringkat
- KPRA Second Schedule 2021-2022Dokumen28 halamanKPRA Second Schedule 2021-2022Bilal BashirBelum ada peringkat
- Baumuller DSC Высокомоментные СерводвигателиDokumen112 halamanBaumuller DSC Высокомоментные СерводвигателиNoks stBelum ada peringkat
- GDC Tech Bulletin Hard Drive Diagnostics v2Dokumen5 halamanGDC Tech Bulletin Hard Drive Diagnostics v2guerreroBelum ada peringkat
- Cyber Crimes in IndiaDokumen11 halamanCyber Crimes in Indiaanoos04100% (1)
- Comparison of ISO 17025Dokumen4 halamanComparison of ISO 17025Susan CarterBelum ada peringkat
- HP iLO4 Command Line Interface (CLI) Guide and Cheatsheet With Examples - GoLinuxHubDokumen15 halamanHP iLO4 Command Line Interface (CLI) Guide and Cheatsheet With Examples - GoLinuxHubAHMED LAAGUIDBelum ada peringkat
- Matrix ActionsDokumen8 halamanMatrix ActionsmaszerkBelum ada peringkat
- Vehicle Tracking Using Android AppDokumen2 halamanVehicle Tracking Using Android AppmonkeBelum ada peringkat
- Output LogDokumen42 halamanOutput Logrizky d'ramadhaniBelum ada peringkat
- DumpsDokumen131 halamanDumpsRia KhareBelum ada peringkat
- Pearson VUE Authorized Test Center List of Available Exams: Information Technology (IT) ExamsDokumen3 halamanPearson VUE Authorized Test Center List of Available Exams: Information Technology (IT) ExamsKenyBelum ada peringkat
- ICT Revision GuideDokumen40 halamanICT Revision GuideIbad Rehman100% (1)
- (Test Your... ) Hirsch R. - Test Your Business English - General Usage (1997, Penguin Books LTD) PDFDokumen47 halaman(Test Your... ) Hirsch R. - Test Your Business English - General Usage (1997, Penguin Books LTD) PDFDewey WulandariBelum ada peringkat
- Telarus Announces The Acquisition of TCGDokumen4 halamanTelarus Announces The Acquisition of TCGPR.comBelum ada peringkat
- Careers Puzzle GuideDokumen2 halamanCareers Puzzle Guidepepac41425% (12)
- Green Building Rating Tool - XXXXDokumen17 halamanGreen Building Rating Tool - XXXXSakisBelum ada peringkat
- W970suw PDFDokumen104 halamanW970suw PDFEdu Kees MorelloBelum ada peringkat
- ABB Review - 01 - 2023 - Layout Complete - EN - 72-300dpi PDFDokumen82 halamanABB Review - 01 - 2023 - Layout Complete - EN - 72-300dpi PDFUsiBelum ada peringkat
- Portstation Breathing Apparatus Self Contained Breathing ApparatusDokumen1 halamanPortstation Breathing Apparatus Self Contained Breathing ApparatusFebriansyah Ar-rasyid AiniBelum ada peringkat
- Synology DS1019 Plus Data Sheet EnuDokumen6 halamanSynology DS1019 Plus Data Sheet EnuSteve AttwoodBelum ada peringkat
- Conceptual Framework Process ChartDokumen2 halamanConceptual Framework Process ChartCarl Michael Robillos100% (6)
- HubSpot Reporting Certification AnswersDokumen23 halamanHubSpot Reporting Certification AnswersE KaynaklarBelum ada peringkat
- Statement of Axis Account No:916010066252060 For The Period (From: 01-04-2021 To: 31-03-2022)Dokumen13 halamanStatement of Axis Account No:916010066252060 For The Period (From: 01-04-2021 To: 31-03-2022)ma.shehlaintBelum ada peringkat
- Stable and Highly EfficientDokumen10 halamanStable and Highly EfficientNexgen TechnologyBelum ada peringkat
- TB 971Dokumen5 halamanTB 971rybthenry engineBelum ada peringkat
- 6EP13334BA00 Datasheet enDokumen4 halaman6EP13334BA00 Datasheet enNguyen TamBelum ada peringkat
- Quotation - Supply and Installation For Roller Shutter - SKBDokumen2 halamanQuotation - Supply and Installation For Roller Shutter - SKBCC Cost AdvisoryBelum ada peringkat