Anda mungkin juga menyukai
- Lab 1 (Info) ..Dokumen89 halamanLab 1 (Info) ..jongaeckBelum ada peringkat
- Anacom 1 (DBPS y DBP)Dokumen17 halamanAnacom 1 (DBPS y DBP)jongaeckBelum ada peringkat
- Anacom 1Dokumen15 halamanAnacom 1jongaeckBelum ada peringkat
- Cómo crear una página web para tu negocioDokumen63 halamanCómo crear una página web para tu negocioMiguel Angel Mora ÑautaBelum ada peringkat
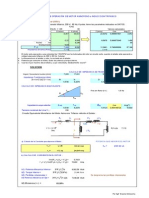
- Cal Motor Induccción 3FDokumen1 halamanCal Motor Induccción 3FjongaeckBelum ada peringkat
- Libro+de+Instrucciones+Th 550 MotorDokumen10 halamanLibro+de+Instrucciones+Th 550 MotorOliver Mendez CubaBelum ada peringkat
- Libro+de+Instrucciones+Th 550 MotorDokumen10 halamanLibro+de+Instrucciones+Th 550 MotorOliver Mendez CubaBelum ada peringkat
- Taller 2 Diseño Mecatronico 2Dokumen46 halamanTaller 2 Diseño Mecatronico 2kamilo ruizBelum ada peringkat
- Control Motor TesisDokumen350 halamanControl Motor TesisJosé Valentin Taveras FriasBelum ada peringkat
- Luis Beltran Control 6Dokumen7 halamanLuis Beltran Control 6luis andres beltran sotoBelum ada peringkat
- S02.s2 - MaterialDokumen53 halamanS02.s2 - MaterialPACO ParedesBelum ada peringkat
- Problema de Coca-ColaDokumen32 halamanProblema de Coca-ColaAimee MizraimBelum ada peringkat
- Control digital PID de banda transportadoraDokumen5 halamanControl digital PID de banda transportadoraCeandve Manceandve0% (1)
- SiteDokumen82 halamanSiteHell BoyBelum ada peringkat
- Ruleta Con CuerdasDokumen4 halamanRuleta Con CuerdasFernando Nelson Candia RiveroBelum ada peringkat
- Material de LecturaDokumen15 halamanMaterial de LecturajuanBelum ada peringkat
- PE Proyectos PAO1 2022Dokumen10 halamanPE Proyectos PAO1 2022Génesis MárquezBelum ada peringkat
- Control ExpertoDokumen38 halamanControl ExpertoWilliams Herrera AhumadaBelum ada peringkat
- Trabajo de StywellDokumen8 halamanTrabajo de StywellMaria Antequera OlivaresBelum ada peringkat
- TCA2 - Experiencia 4Dokumen13 halamanTCA2 - Experiencia 4Jose Ivan CuetoBelum ada peringkat
- Investigacion Documental VazuqezDokumen13 halamanInvestigacion Documental VazuqezEstebanVallinLopezBelum ada peringkat
- Automatizacion IndustrialDokumen205 halamanAutomatizacion Industrialsuptronic195% (78)
- Module c1Dokumen67 halamanModule c1Liam JJBelum ada peringkat
- Factor de FormaDokumen43 halamanFactor de FormaLeoVelitaEspinozaBelum ada peringkat
- Proyecto Teoria de Control UPSDokumen11 halamanProyecto Teoria de Control UPSJaime QuishpeBelum ada peringkat
- Sistemas de Control Aplicado Catedra PDFDokumen234 halamanSistemas de Control Aplicado Catedra PDFjose morenoBelum ada peringkat
- Sistemas de Control - Lugares Geométricos de Raíces y Diseño de Compensadores para 5 EjerciciosDokumen8 halamanSistemas de Control - Lugares Geométricos de Raíces y Diseño de Compensadores para 5 EjerciciosBryan HerreraBelum ada peringkat
- Introducción al Control de Procesos para IngenierosDokumen296 halamanIntroducción al Control de Procesos para IngenierosJhon Alex BelalcazBelum ada peringkat
- Tema 04 - Respuesta Temporal Con Routh v2 - VicenteDokumen80 halamanTema 04 - Respuesta Temporal Con Routh v2 - Vicentecristianc2ga92Belum ada peringkat
- Evolución control automáticoDokumen4 halamanEvolución control automáticoRemiel Zapata GBelum ada peringkat
- Haltech 2Dokumen28 halamanHaltech 2David Espinoza CBelum ada peringkat
- Modelos Matematicos de SistemasDokumen7 halamanModelos Matematicos de SistemasRony Jhonatan Sanez GutirrezBelum ada peringkat
- Instrumentación IndustrialDokumen13 halamanInstrumentación IndustrialAnita CalleBelum ada peringkat
- Contenido Semana 1Dokumen24 halamanContenido Semana 1hjfahjs jhvftrBelum ada peringkat
- Informe de Programadores de Sistemas de Control e InstrumentaciónDokumen12 halamanInforme de Programadores de Sistemas de Control e InstrumentaciónSINCHE ESTRADA, JosueBelum ada peringkat
- Examen II Control ProcesosDokumen7 halamanExamen II Control Procesosdavid gonzales calderonBelum ada peringkat
- Teoria PLCDokumen46 halamanTeoria PLCPedro ReyesBelum ada peringkat