Anda mungkin juga menyukai
- Analysis and Design For 5kw PFC ConverterDokumen4 halamanAnalysis and Design For 5kw PFC Converterranjith120198Belum ada peringkat
- A Voltage-Mode PWM Buck Regulator With End-Point PredictionDokumen5 halamanA Voltage-Mode PWM Buck Regulator With End-Point PredictionWen DwenBelum ada peringkat
- A Variable Switching Frequency With Boost Power Factor Correction ConverterDokumen8 halamanA Variable Switching Frequency With Boost Power Factor Correction ConverterJaya AhujaBelum ada peringkat
- Design and Implementation of An Observer Controller For A Buck ConverterDokumen11 halamanDesign and Implementation of An Observer Controller For A Buck ConverterLee DonghyeeBelum ada peringkat
- A Unity Power Factor Converter Using HalfDokumen14 halamanA Unity Power Factor Converter Using HalfLivia Faria PeresBelum ada peringkat
- DesignFeatures 3-1110Dokumen10 halamanDesignFeatures 3-1110khaled1512Belum ada peringkat
- A New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning SystemDokumen12 halamanA New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning Systemmj5995Belum ada peringkat
- 01413552Dokumen8 halaman01413552Nalin Lochan GuptaBelum ada peringkat
- Quadratic Boost Converter For Photovoltaic Micro-Inverter: Ashirvad M and Rupesh K CDokumen6 halamanQuadratic Boost Converter For Photovoltaic Micro-Inverter: Ashirvad M and Rupesh K CUmesh KumarBelum ada peringkat
- Lab. Exercise PL1 CC/CC Converters: Electrònica de Potència Grau en Enginyeria Electrònica Industrial I AutomàticaDokumen8 halamanLab. Exercise PL1 CC/CC Converters: Electrònica de Potència Grau en Enginyeria Electrònica Industrial I AutomàticageovannyBelum ada peringkat
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDokumen7 halamanDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniBelum ada peringkat
- Ieee Current ModeDokumen7 halamanIeee Current ModepqqpBelum ada peringkat
- Analysis of Different Topologies For Active Power Factor CorrectionDokumen8 halamanAnalysis of Different Topologies For Active Power Factor Correctionnnpatel1990Belum ada peringkat
- Design and Implementation of Multiple Output Switch Mode Power SupplyDokumen6 halamanDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupBelum ada peringkat
- Minimizing DC Current Ripple in a Three-phase Buck+Boost RectifierDokumen6 halamanMinimizing DC Current Ripple in a Three-phase Buck+Boost RectifierHugo LeónBelum ada peringkat
- Fine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkDokumen8 halamanFine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkHedra GirgisBelum ada peringkat
- Matrix Converter PhD Thesis OverviewDokumen15 halamanMatrix Converter PhD Thesis OverviewAnonymous EnggrUsmBelum ada peringkat
- DC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierDokumen11 halamanDC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierRajni YadavBelum ada peringkat
- Power Quality Improvement of Unified Power Quality Conditioner Using Reference Signal Generation MethodDokumen5 halamanPower Quality Improvement of Unified Power Quality Conditioner Using Reference Signal Generation MethodSurya Ch VenkataBelum ada peringkat
- High Efficiency DC-to-AC Power Inverter With Special DC InterfaceDokumen6 halamanHigh Efficiency DC-to-AC Power Inverter With Special DC InterfacestrahinjaBelum ada peringkat
- Design of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterDokumen5 halamanDesign of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterInternational Organization of Scientific Research (IOSR)Belum ada peringkat
- Novel Control for Direct Interface Converters in DC and AC Power SuppliesDokumen10 halamanNovel Control for Direct Interface Converters in DC and AC Power SuppliesSherif M. DabourBelum ada peringkat
- 87Dokumen5 halaman87vinay kumarBelum ada peringkat
- 00878876Dokumen6 halaman00878876jazzdeepakBelum ada peringkat
- Compensators For The Buck Converter: Design and AnalysisDokumen25 halamanCompensators For The Buck Converter: Design and AnalysisÖzgür YılmazBelum ada peringkat
- AC/DC Converter With Active Power Factor Correction Applied To DC Motor DriveDokumen9 halamanAC/DC Converter With Active Power Factor Correction Applied To DC Motor DriveIJERDBelum ada peringkat
- 2011 - Control of A DCDC Converter by Fuzzy Controller For A Solar Pumping System - Paper N. Mazouz, A. MidounDokumen8 halaman2011 - Control of A DCDC Converter by Fuzzy Controller For A Solar Pumping System - Paper N. Mazouz, A. MidounBoruziaBelum ada peringkat
- 2011 Important PDFDokumen6 halaman2011 Important PDFShaheer DurraniBelum ada peringkat
- ThesisDokumen75 halamanThesishodeegits9526Belum ada peringkat
- Active Power Factor Correction for Single Phase Full Bridge RectifierDokumen6 halamanActive Power Factor Correction for Single Phase Full Bridge RectifierAnand KumarBelum ada peringkat
- Self-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionDokumen11 halamanSelf-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionJie99Belum ada peringkat
- Microcontroller-Based Boost ConverterDokumen10 halamanMicrocontroller-Based Boost ConverterDevendra DwivdiBelum ada peringkat
- An Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeDokumen3 halamanAn Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeIDESBelum ada peringkat
- PCM BuckboostDokumen5 halamanPCM BuckboostDipanjan DasBelum ada peringkat
- 3 Phase Full Wave Bridge ConverterDokumen4 halaman3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Modelling Bidirectional Buck BoostDokumen7 halamanModelling Bidirectional Buck BoostAkay HanafiahBelum ada peringkat
- BuckConverter Design Jpe10Dokumen13 halamanBuckConverter Design Jpe10joviflocasBelum ada peringkat
- A Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFDokumen8 halamanA Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFqiwatingBelum ada peringkat
- Statespace Model FWD ConverterDokumen4 halamanStatespace Model FWD ConverterrogerozBelum ada peringkat
- DC DC ConvertersDokumen4 halamanDC DC Convertersmurthy237Belum ada peringkat
- A Space Vector-Based Rectifier Regulator For AC DC AC ConvertersDokumen7 halamanA Space Vector-Based Rectifier Regulator For AC DC AC ConvertersSofia FrlBelum ada peringkat
- OhnumaDokumen7 halamanOhnumaHiển TrầnBelum ada peringkat
- Buck, Boost and Buck-Boost Inverter ComparisonDokumen6 halamanBuck, Boost and Buck-Boost Inverter ComparisonIndra PratamaBelum ada peringkat
- A D-Q Synchronous Frame Controller For Single Phase InverterDokumen7 halamanA D-Q Synchronous Frame Controller For Single Phase InvertershanBelum ada peringkat
- A New Transformerless Single-Phase Buck-Boost AC Voltage RegulatorDokumen6 halamanA New Transformerless Single-Phase Buck-Boost AC Voltage Regulatordinhngock6Belum ada peringkat
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDokumen2 halamanA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719Belum ada peringkat
- A Novel Approach For A Sinusoidal Output Inverter: Irfan AlanDokumen6 halamanA Novel Approach For A Sinusoidal Output Inverter: Irfan AlanKari Romero GuizasolaBelum ada peringkat
- Comparative AnalysisDokumen6 halamanComparative AnalysisDrVikas Singh BhadoriaBelum ada peringkat
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDokumen38 halamanVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyBelum ada peringkat
- Modelado DC DCDokumen8 halamanModelado DC DCAndrés Vanegas GuillénBelum ada peringkat
- PWM PHA M Inve Ase Hi Erter High Q Ers Fo Qual or ST Lity P Tand-Powe - Alon Er Ge Ne Sin Enera Ingle Ation E - NDokumen6 halamanPWM PHA M Inve Ase Hi Erter High Q Ers Fo Qual or ST Lity P Tand-Powe - Alon Er Ge Ne Sin Enera Ingle Ation E - Nron1234567890Belum ada peringkat
- Slidin Mode Research PaperDokumen33 halamanSlidin Mode Research PaperAnimesh JainBelum ada peringkat
- A Novel Single-Stage Full-Bridge Buck-Boost InverterDokumen10 halamanA Novel Single-Stage Full-Bridge Buck-Boost InverteriiscgovindraiBelum ada peringkat
- Zero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellsDokumen8 halamanZero-Steady-State-Error Input-Current Controller For Regenerative Multilevel Converters Based On Single-Phase CellssghfqweBelum ada peringkat
- Ec1355 Esd EceDokumen31 halamanEc1355 Esd EceSenthil KumarBelum ada peringkat
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDokumen5 halamanDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherBelum ada peringkat
- A Novel Buck Boost InverterDokumen8 halamanA Novel Buck Boost InverterskrtamilBelum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesBelum ada peringkat
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDokumen3 halaman2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattBelum ada peringkat
- Chapter - 15: Some Natural PhenomenaDokumen28 halamanChapter - 15: Some Natural PhenomenaKrishnaveni Subramani SBelum ada peringkat
- Chapter - 15: Some Natural PhenomenaDokumen28 halamanChapter - 15: Some Natural PhenomenaKrishnaveni Subramani SBelum ada peringkat
- Lightning InjuriesDokumen33 halamanLightning InjuriesKrishnaveni Subramani SBelum ada peringkat
- 92510-7474 Ijet-IjensDokumen7 halaman92510-7474 Ijet-IjensKrishnaveni Subramani SBelum ada peringkat
- Pulsed Electric Field Processing in Food Technology: Yashwant Kumar, Krishna Kumar Patel and Vivek KumarDokumen12 halamanPulsed Electric Field Processing in Food Technology: Yashwant Kumar, Krishna Kumar Patel and Vivek KumarKrishnaveni Subramani SBelum ada peringkat
- Solid-State Electronics: Lei Lin, Jian H. ZhaoDokumen5 halamanSolid-State Electronics: Lei Lin, Jian H. ZhaoKrishnaveni Subramani SBelum ada peringkat
- Journal of Electrostatics: Sadhana Talele, Paul Gaynor, Michael J. Cree, Jethro Van EkeranDokumen14 halamanJournal of Electrostatics: Sadhana Talele, Paul Gaynor, Michael J. Cree, Jethro Van EkeranKrishnaveni Subramani SBelum ada peringkat
- Engineering Study Material, Books And GuidanceDokumen9 halamanEngineering Study Material, Books And GuidancedhineshBelum ada peringkat
- BB 1998Dokumen14 halamanBB 1998Krishnaveni Subramani SBelum ada peringkat
- Reversed Switch-On Dynistor Switches of Gigawatt Power Microsecond PulsesDokumen10 halamanReversed Switch-On Dynistor Switches of Gigawatt Power Microsecond PulsesKrishnaveni Subramani SBelum ada peringkat
- Impedance Matching1Dokumen5 halamanImpedance Matching1Krishnaveni Subramani SBelum ada peringkat
- Real Time Pasteurization DataDokumen3 halamanReal Time Pasteurization DataKrishnaveni Subramani SBelum ada peringkat
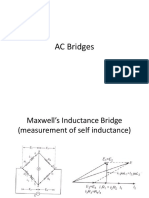
- AC BridgesDokumen10 halamanAC BridgesKrishnaveni Subramani SBelum ada peringkat
- Enthan Uyir Kadhaliye PDFDokumen65 halamanEnthan Uyir Kadhaliye PDFAjay Sanmukanathan60% (5)
- Basics of ElectricityDokumen29 halamanBasics of ElectricityKrishnaveni Subramani SBelum ada peringkat
- Electrical Modeling of Medium Conductivity's Influence on ElectroporationDokumen23 halamanElectrical Modeling of Medium Conductivity's Influence on ElectroporationKrishnaveni Subramani SBelum ada peringkat
- Conf 97Dokumen4 halamanConf 97Krishnaveni Subramani SBelum ada peringkat
- Matlab Lect 3Dokumen8 halamanMatlab Lect 3Krishnaveni Subramani SBelum ada peringkat
- Engineering20090100001 94428501Dokumen9 halamanEngineering20090100001 94428501Krishnaveni Subramani SBelum ada peringkat
- Impedance Matching Optimization Based On MATLABDokumen112 halamanImpedance Matching Optimization Based On MATLABKrishnaveni Subramani SBelum ada peringkat
- Electric Field Calculations by NumericalmethodsDokumen99 halamanElectric Field Calculations by NumericalmethodsvignanarajBelum ada peringkat
- D0515032413Dokumen4 halamanD0515032413Krishnaveni Subramani SBelum ada peringkat
- High-Frequency Soft-Switching DC-DC Converters For Voltage and Current DC Power SourcesDokumen18 halamanHigh-Frequency Soft-Switching DC-DC Converters For Voltage and Current DC Power SourcesFaraz AhmadBelum ada peringkat
- Kennedy BioPhys 08Dokumen10 halamanKennedy BioPhys 08Krishnaveni Subramani SBelum ada peringkat
- DT 31574579Dokumen6 halamanDT 31574579IJMERBelum ada peringkat
- Electronics Lab 11Dokumen19 halamanElectronics Lab 11Krishnaveni Subramani SBelum ada peringkat
- Theory of Impedance Networks: The Two-Point Impedance and LC ResonancesDokumen21 halamanTheory of Impedance Networks: The Two-Point Impedance and LC ResonancesKrishnaveni Subramani SBelum ada peringkat
- Effect of L and C On Q FactorDokumen0 halamanEffect of L and C On Q FactorTayyab NoumanBelum ada peringkat
- Powador Megawatt-Station: High-tech 3-inverter station for 1 MW outputDokumen2 halamanPowador Megawatt-Station: High-tech 3-inverter station for 1 MW outputMitesh PhalakBelum ada peringkat
- Dual Gate Mosfet Data Sheet PDFDokumen8 halamanDual Gate Mosfet Data Sheet PDFHarish Kutty HariBelum ada peringkat
- TdaDokumen7 halamanTdaΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣBelum ada peringkat
- Yaohua A12 User ManualDokumen10 halamanYaohua A12 User ManualMatjaž LekšanBelum ada peringkat
- Prusa - I3 - Rework - Rev1.5 - First Use InstructionsDokumen40 halamanPrusa - I3 - Rework - Rev1.5 - First Use InstructionshipercortexBelum ada peringkat
- RM-11 Metronic Primary Watthour StandardDokumen2 halamanRM-11 Metronic Primary Watthour StandardMiko QuijanoBelum ada peringkat
- Wire Tracer (Transmitter) : Return To BlogDokumen2 halamanWire Tracer (Transmitter) : Return To Blogver_at_workBelum ada peringkat
- Description: Eagle Quantum Premier Agent Release Module EQ2500ARMDokumen2 halamanDescription: Eagle Quantum Premier Agent Release Module EQ2500ARMFernando Zambrano San Martín0% (1)
- Advantages and Disadvantages of Mobile Communication TechnologyDokumen1 halamanAdvantages and Disadvantages of Mobile Communication TechnologyJay Chan PamoteBelum ada peringkat
- MC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Dokumen24 halamanMC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Willington Augusto ArizaBelum ada peringkat
- NTSC, PAL and VHSDokumen2 halamanNTSC, PAL and VHSWahengbam RorrkychandBelum ada peringkat
- Power Dividers and CouplersDokumen16 halamanPower Dividers and CouplersFahim UsmanBelum ada peringkat
- Ee5151: Communication Techniques: Hint: Use The Fact When L Landf F For Each "I", ThenDokumen2 halamanEe5151: Communication Techniques: Hint: Use The Fact When L Landf F For Each "I", ThenAshish KatochBelum ada peringkat
- Omantel 3G Handover To GSM Topic: Huawei Technologies Co., LTDDokumen19 halamanOmantel 3G Handover To GSM Topic: Huawei Technologies Co., LTDkhexdjeBelum ada peringkat
- New Capability Announcement RRH HUAWEI 20160708Dokumen61 halamanNew Capability Announcement RRH HUAWEI 20160708Lucas YeniddinBelum ada peringkat
- Digital Portable Power Clamp Harmonics KM 2709Dokumen2 halamanDigital Portable Power Clamp Harmonics KM 2709industrialindia1Belum ada peringkat
- 02 DBXRH 8585c VTM - AspxDokumen2 halaman02 DBXRH 8585c VTM - AspxGiuseppeNapolitanoBelum ada peringkat
- Giancoli Zanswers Odd Problems PDFDokumen16 halamanGiancoli Zanswers Odd Problems PDFAHKEEL LESTER JONESBelum ada peringkat
- EFFECT OF SUBSTRATE THICKNESS AND PERMITTIVITY ON PATCH ANTENNA - Vikas RathiDokumen4 halamanEFFECT OF SUBSTRATE THICKNESS AND PERMITTIVITY ON PATCH ANTENNA - Vikas RathiVikasrathi RathiBelum ada peringkat
- 710-04302-00A AuCom Pump Application Interface InstructionsDokumen8 halaman710-04302-00A AuCom Pump Application Interface InstructionsElectrificationBelum ada peringkat
- LTE and LTE-Advanced Solutions: Keysight TechnologiesDokumen13 halamanLTE and LTE-Advanced Solutions: Keysight Technologiesumts12345100% (1)
- RBSXT 5HnDr5 Trouble Shooting 2Dokumen10 halamanRBSXT 5HnDr5 Trouble Shooting 2Elisa Cabral100% (1)
- Kuliah 3-HIDROGRAFIDokumen16 halamanKuliah 3-HIDROGRAFIaizatBelum ada peringkat
- New PriceDokumen4 halamanNew PricePraneeth Bunga100% (2)
- EECB351-Exp 1 - Intro To EMONA TrainerDokumen6 halamanEECB351-Exp 1 - Intro To EMONA TrainerWong YinwenBelum ada peringkat
- FT-60R Quick Guide, Rev 3Dokumen22 halamanFT-60R Quick Guide, Rev 3yu7bx2178Belum ada peringkat
- 01 Gk-Kit-Gt3 OmDokumen4 halaman01 Gk-Kit-Gt3 OmSaverioCorBelum ada peringkat
- FireDepartmentTwo toneToneOutDokumen5 halamanFireDepartmentTwo toneToneOutla1450Belum ada peringkat
- Generations of Mobile Wireless Technology: A Survey: Mudit Ratana Bhalla Anand Vardhan BhallaDokumen7 halamanGenerations of Mobile Wireless Technology: A Survey: Mudit Ratana Bhalla Anand Vardhan BhallaSreekanth C KannurBelum ada peringkat
- SANYO A3-A Chassis Training ManualDokumen67 halamanSANYO A3-A Chassis Training ManualavrelecBelum ada peringkat