International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 1
ISSN: 2321-8169
36 40
_______________________________________________________________________________________________
Modified Hough Transform for Road Lane Colorization to Prevent Accidents
Guramarjot Kaur, Prof. Jatinder Kumar
Dept. of Computer Science and engineering
SIET, Amritsar, (Punjab) India.
amarkahlon25@yahoo.com, jkteji@gmail.com
Abstract:-Lane coloration is becoming popular in real time vehicular ad-hoc network. This research work focus on providing better performance
in lane coloration algorithm by using CLAHE to enhance the input image and also by modifying the Hough transform using the dynamic
thresholding to detect curve lanes. Main emphasis is to improve the result of lane coloration algorithm when fog, noise or any other factor is
present in the images. The methods developed so far are working efficiently and giving good results in case when the straight lane road images
are there. But problem is that they fail or not give efficient results when there are curved lane road images. The experiments results for the road
images have shown the significant improvement of the proposed technique over the available one.
Index Terms: LANE, ROAD, ACCIDIENTS, HOUGH, CLAHE.
__________________________________________________*****_________________________________________________
system, intelligent vehicle cooperate with smart
infrastructure to attain a secure environment and better
1. INTRODUCTION
Lane coloration plays an important role in a number of
traffic conditions. Vanet communication is also most
intelligent automobile applications. It is used for color the
important in the region of wireless networking as well as in
lanes to recover the human vision. It permit vehicular
the automotive industry. The onboard sensors provide realdrivers to drive carefully by telling them that where the
time information about drivers, traffic environment, and
really lanes exist on the road and avoid disasters. As there
vehicles. The image system is the key element of intelligent
exist much fewer possibility of disasters when vehicle not
vehicle technology, where the Lane Detection algorithm is
cross the lanes. The lane coloration methods can be
the central part of assistant navigation in intelligent vehicle
categorized into infrastructure-based and vision-based
[5] [6] [7] [8].
methods. The infrastructure-based method achieve strength,
By using visualization technology, it is possible to create a
build price to put coaxial cables or to locate magnetic
driver support system to identify lane markings on existing
indicators on the road plane is high. Vision based method
path infrastructure. Lane detection using Image processing
with camera on a vehicle have benefits to use well-known
is worked by setting the webcam camera to monitor the
existing lane recognition in the road position and to sense a
movement of vehicle throughout the lanes. The main
road curves in front view [3].
elements of driving system detection are webcam camera
Lane detection is one of the most significant part of the
and computer for store image data. The computer vision
Driver Assistance System. It provides path information for
based approach become particularly significant in traffic
driver safety with vehicle location and direction. Lane
applications generally due to their quick response, simple
detection deal with the tracking of the lane boundaries from
installation, operation and maintenance. A color camera is
frame to frame given an existing model of road geometry.
mounted in the vehicle at the front-view mirror. It captures
Lane detection in an urban street is specially a hard problem.
the images of the atmosphere in front of the vehicle
Challenges include: poor quality lines, darkness transmit
including the path, and also vehicles on the path [6]
from trees, sharper curves etc. The lane departure warning
[10][11].
system is a fundamental part within the driver assistance
In general, lane marks are lines and curves like structure.
system, aims to provide warning messages under irregular
The
disconnected lane marks can be recognized with lane
driving behaviors due to interruption, or driver inattention
detection
algorithm. The Lane detection algorithm detects
[1] [2] [3].
the lanes, based on the image captured from a camera. In
Automatic lane recognition provide support to human
this algorithm select the region of interest from input image
drivers .The information of the lane margins relative to the
to identify the lane area. The road lanes can discover with
vehicle allow a driver support system to aware a driver as to
Hough transformation. To decrease computation overhead,
whether the vehicle is potentially steering off track. The lane
the canny edge detector is used to identify the boundary
departure warning and tracking systems have common
pixels. The detected boundary pixels are then follow by the
applications in intelligent transportation system and in
Hough transform. It transforms between the Cartesian space
Vehicular Ad-Hoc Network .In intelligent transportation
and a parameter space in which a straight line can be define.
36
IJRITCC | January 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 1
ISSN: 2321-8169
36 40
_______________________________________________________________________________________________
It usually shows lines in the image. So the path straight lines
in the image are identify used the Hough transformation.
The advantage of Hough transform is that the pixels lying
on one line require not all be adjacent. Therefore, it is very
helpful for detect lines with short breaks in them due to
noise or partially occluded by objects [2] [4] [6] [9] [12].
2.
3.
EXPERIMENTAL SETUP
These are some following images which helps to compare
the results of proposed algorithm with existing approach.
PROPOSED ALGORITHM
How Modified Hough based Lane colorization works
Proposed algorithm takes following steps shown in Figure
2.1.
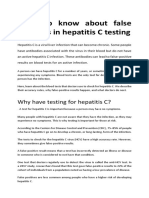
Fig-3.1: a) Input Image b) Result of existing method c)
Result of proposed method
+
Fig-2.1: Proposed Algorithm
Step 1: Read the Road image.
Step 2: Apply CLAHE to enhance the input
image.
Step 3: Convert image into the gray scale if it is in color
plane.
Step 4: Now image binarization algorithm will come in
action to convert image to binary one.
Step 5: Now unwanted objects will be removed from the
binarized road image.
Step 6: Now canny edge detection will be applied to detect
lane edges.
Step 7: Now apply modified Hough transform, and dynamic
thresholding based algorithm to detect the lanes.
Step 8: Now just color the lanes.
These Figures shows better human visibility of original
image by using proposed algorithm as compared to previous
technique and provide better visibility results with improved
efficiency.
4.
PERFORMANCE EVALUATION
4.1 FMeasure Analysis:
FMeasure is a measure of a test's correctness. It consider
both the accuracy p and the recollect of the test to calculate
the score: p is the number of correct results divided by the
number of all returned results and r is the number of correct
results divided by the number of correct results that should
have been returned.
37
IJRITCC | January 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 1
ISSN: 2321-8169
36 40
_______________________________________________________________________________________________
Table 4.1 demonstrates the evaluation of existing and
proposed methods. By using proposed algorithm, the results
of FMeasure becomes higher than previous results.
32.5438
17.0818
27.0138
0.6666
4.5224
0.8459
Table 4.1: FMeasure Analysis Evaluation
Images
Existing
Proposed
1
2.8254
49.0694
2
51.7557
79.3993
3
62.9877
99.3289
4
95.2634
99.1468
5
83.3526
99.5879
6
35.9087
93.3216
7
93.6793
98.1119
8
95.0817
99.3484
9
93.7963
97.1442
10
52.5398
92.9378
11
64.0087
78.2580
12
19.3373
65.0157
13
38.7586
94.0295
14.2716
0.4104
39.0583
6.2603
5.9449
1.8532
4.6877
0.6474
5.8413
2.7765
10
32.1851
6.5963
11
26.4659
17.8591
12
44.6482
25.9173
13
37.9812
0.8873
The following graph presents the information of FMeasure
and evaluates it within two statements. Blue bar expose the
existing method and green bar describe the proposed method
which is improved as compared to earlier ones.
Graph-4.1: FMeasure of previous results and proposed
results for different images
4.2 Bit Error Rate (BER) Analysis:
Bit Error Rate is defined as the number of bit errors divided
by the total number of transferred bits during a studied time
interval. BER is a unit less performance measure, often
expressed as a percentage.
Table 4.2 illustrates the comparison of
bit error rate between existing and proposed method. By
using proposed algorithm the value of bit error rate becomes
lower as compared to previous results.
Table 4.2: Bit Error Rate Evaluation
Images
Existing Proposed
1
49.2835
33.7444
The following graph shows the representation of bit error
rate value analysis between previous and proposed
technique. Blue bar reveal the existing method and green bar
define the proposed method which are better as compared to
previous ones.
Graph-4.2: Bit Error Rate of previous results and
proposed results for different images
4.3 Accuracy: Accuracy is defined in terms of logical
errors. It is the proximity of measurement results to the true
value.
Table 4.3 shows the comparison of accuracy between
existing and proposed method. By using proposed algorithm
the accuracy becomes higher as compared to previous
results.
Table 4.3: Accuracy Evaluation
Images
Existing Proposed
1
0.1197
0.3857
0.3639
0.6638
0.4875
0.9873
0.9116
0.9834
0.7237
0.992
0.2287
0.8752
38
IJRITCC | January 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 1
ISSN: 2321-8169
36 40
_______________________________________________________________________________________________
7
0.8864
0.9644
0.9068
0.9935
0.8843
0.9449
10
0.6781
0.8708
11
0.4905
0.6506
12
0.1131
0.4827
13
0.2873
0.893
11
5.8573
9.1328
12
1.0424
5.7256
13
2.9417
19.4116
The following graph demonstrates the representation of
PSNR value analysis between previous and proposed
techniques. Blue bar expose the existing method and Yellow
bar express the proposed methods which are advanced as
compared to prior ones.
The following graph shows the representation of accuracy
value analysis between previous and proposed techniques.
Blue bar expose the existing method and Green bar describe
the proposed method which are superior as compared to
previous ones.
Graph-4.4: PSNR of previous results and proposed
results for different images
4.5 Sensitivity Analysis:
Graph-4.3: Accuracy of previous results and proposed
results for different images
4.4 Peak signal-to-noise ratio (PSNR) Analysis:
Peak signal-to-noise ratio is defined as the ratio between the
maximum possible power of a signal and the power of
corrupting noise that affect the reliability of its
representation. It is an estimate to human view of
reconstruction quality.
Table 4.4 illustrates the comparison of Peak signal-to-noise
ratio between existing and proposed method. By using
proposed algorithm the value of PSNR becomes improved
as compared to previous results.
Table 4.4: Peak signal-to-noise ratio Evaluation
Images
Existing
Proposed
1
1.0257
4.2330
2
3.9290
9.4691
3
5.8067
37.9332
4
21.0665
35.6003
5
11.1729
41.9772
6
2.2556
18.0731
7
18.8898
28.9692
8
20.6143
37.7707
9
18.7344
25.1799
10
4.2405
17.7746
Sensitivity is measures the proportion of actual positives
which are correctly identified and is opposite to the false
negative rate.
Table 4.5 shows the comparison of sensitivity analysis
between existing and proposed method. By using proposed
algorithm the value of sensitivity becomes better as
compared to previous results.
Table 4.5: Sensitivity Evaluation
Images
Existing
Proposed
1
0.0143
0.3251
2
0.3491
0.6584
3
0.4597
0.9867
4
0.9096
0.9831
5
0.7146
0.9918
6
0.2188
0.8748
7
0.8811
0.9629
8
0.9062
0.9871
9
0.8832
0.9445
10
0.3563
0.8681
11
0.4707
0.6428
12
0.1070
0.4817
13
0.2404
0.8873
The following graph shows the representation of sensitivity
value analysis between previous and proposed techniques.
Blue bar reveal the existing method and Yellow bar define
39
IJRITCC | January 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 1
ISSN: 2321-8169
36 40
_______________________________________________________________________________________________
the proposed method which are advanced as compared to
prior ones.
[4]
[5]
[6]
[7]
Graph-4.5: Sensitivity of previous results and proposed
results for different images
5.
[8]
CONCLUSION
Main emphasis of this paper is to improve the result of lane
coloration algorithm when fog, noise or any other factor is
present in the images. The methods developed so far are
working efficiently and giving good results in case when the
straight lane road images are there. But problem is that they
fail or not give efficient results when there are curved lane
road images. The proposed technique has the ability to
handle various kind of circumstances i.e. like foggy images,
night time images etc. Also the proposed technique is more
proficient for curved lane images. The experiments results
for the road images have shown the significant improvement
of the proposed technique over the available one.
[9]
[10]
[11]
This work has neglected the use of any evolutionary
technique for detection of the lanes of the road images in
efficient manner. So in near future we will enhance the
proposed work by using the ant colony optimization based
lane detection.
REFERENCES
[1]
[2]
[3]
[12]
Emerging Trends & Technology in Computer Science
(IJETTCS), vol. 2,pp. 202-204 , Aug 2013.
Hajianfard, Mohsen, Hossein Emami, Behzad
Bahraminejad, and Yaser Pazoki,"Lane detection and
tracking and predict the road using feature based
techniques," Journal of multimedia processing, Vol. 2,
No. 3, Sep 2013.
Wijesoma, Wijerupage Sardha, KR Sarath Kodagoda,
Arjuna P. Balasuriya, and Eam Khwang Teoh,"Road
edge and lane boundary detection using laser and vision,"
IEEE/RSJ International Conference on Intelligent Robots
and Systems, vol. 3, pp. 1440-1445, 2001.
Hota, Rudra N., Shahanaz Syed, Subhadip
Bandyopadhyay, and P. Radha Krishna,"A Simple and
Efficient Lane Detection using Clustering and Weighted
Regression,"15th
International
Conference
on
Management of Data (COMAD), Dec 2009.
Shen, Yu, Jianwu Dang, Enen Ren, and Tao Lei, "A
Multi-structure Elements Based Lane Recognition
Algorithm," pp. 206-210, 2013.
Hong Cheng, Nanning Zheng, Xuetao Zhang, Junjie Qin,
and Huub van de Wetering, "Interactive road situation
analysis for driver assistance and safety warning
systems: Framework and algorithms." IEEE Conference
on Intelligent Transportation Systems, Transactions on 8,
no. 1, pp-157-167, March 2007.
S.Suchitra, R.K.Satzoda and T.Srikanthan, "Identifying
Lane Types: A Modular Approach," IEEE Conference on
Intelligent Transportation Systems, pp. 1929-1934, Oct
2013.
Ganokratanaa, Thittaporn, Mahasak Ketcham, and Sasipa
Sathienpong,"Real-time Lane Detection for driving
system using image processing based on edge detection
and Hough transform," the Third International
Conference on Digital Information and Communication
Technology and its Applications (DICTAP), pp. 104109,2013.
Assidiq, Abdulhakam AM, Othman O. Khalifa, R. Islam,
and Sheroz Khan,"Real time lane detection for
autonomous vehicles," International Conference on
Computer and Communication Engineering (ICCCE),
pp. 82-88, May 2008.
Aung, Thanda, and Myo Hein Zaw, "Video Based Lane
Departure Warning System using Hough Transform,"
International Conference on Advances in Engineering
and Technology (ICAET), pp. 85-88 ,March 2014.
Aly, Mohamed, "Real time detection of lane markers in
urban streets," IEEE conference on Intelligent Vehicles
Symposium, pp. 7-12, June 2008.
Chi-Wai Tang, Kai-Ten Feng , Po-Hsuan Tseng, ChienHua Chen, and Jing-Wei Guo,"A pitch-aided lane
tracking algorithm for driver assistance system with
insufficient observations," IEEE Conference on Wireless
Communications and Networking Conference (WCNC),
pp. 3261-3266 ,2012.
Rajandeep, and Prabhdeep Singh, "Lane Colorization
Techniques- A Survey, "International Journal of
40
IJRITCC | January 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
Anda mungkin juga menyukai
- Regression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeDokumen7 halamanRegression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeEditor IJRITCCBelum ada peringkat
- Channel Estimation Techniques Over MIMO-OFDM SystemDokumen4 halamanChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCBelum ada peringkat
- A Review of Wearable Antenna For Body Area Network ApplicationDokumen4 halamanA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCBelum ada peringkat
- A Review of 2D &3D Image Steganography TechniquesDokumen5 halamanA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCBelum ada peringkat
- Modeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleDokumen4 halamanModeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleEditor IJRITCCBelum ada peringkat
- A Review of 2D &3D Image Steganography TechniquesDokumen5 halamanA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCBelum ada peringkat
- IJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Dokumen3 halamanIJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Editor IJRITCCBelum ada peringkat
- Channel Estimation Techniques Over MIMO-OFDM SystemDokumen4 halamanChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCBelum ada peringkat
- Performance Analysis of Image Restoration Techniques at Different NoisesDokumen4 halamanPerformance Analysis of Image Restoration Techniques at Different NoisesEditor IJRITCCBelum ada peringkat
- Comparative Analysis of Hybrid Algorithms in Information HidingDokumen5 halamanComparative Analysis of Hybrid Algorithms in Information HidingEditor IJRITCCBelum ada peringkat
- Importance of Similarity Measures in Effective Web Information RetrievalDokumen5 halamanImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCBelum ada peringkat
- A Review of Wearable Antenna For Body Area Network ApplicationDokumen4 halamanA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCBelum ada peringkat
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDokumen3 halamanPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaBelum ada peringkat
- Network Approach Based Hindi Numeral RecognitionDokumen4 halamanNetwork Approach Based Hindi Numeral RecognitionEditor IJRITCCBelum ada peringkat
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDokumen5 halamanDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCBelum ada peringkat
- 41 1530347319 - 30-06-2018 PDFDokumen9 halaman41 1530347319 - 30-06-2018 PDFrahul sharmaBelum ada peringkat
- Fuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewDokumen4 halamanFuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewEditor IJRITCCBelum ada peringkat
- Efficient Techniques For Image CompressionDokumen4 halamanEfficient Techniques For Image CompressionEditor IJRITCCBelum ada peringkat
- 44 1530697679 - 04-07-2018 PDFDokumen3 halaman44 1530697679 - 04-07-2018 PDFrahul sharmaBelum ada peringkat
- Prediction of Crop Yield Using LS-SVMDokumen3 halamanPrediction of Crop Yield Using LS-SVMEditor IJRITCCBelum ada peringkat
- 45 1530697786 - 04-07-2018 PDFDokumen5 halaman45 1530697786 - 04-07-2018 PDFrahul sharmaBelum ada peringkat
- A Study of Focused Web Crawling TechniquesDokumen4 halamanA Study of Focused Web Crawling TechniquesEditor IJRITCCBelum ada peringkat
- Itimer: Count On Your TimeDokumen4 halamanItimer: Count On Your Timerahul sharmaBelum ada peringkat
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDokumen3 halamanSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaBelum ada peringkat
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDokumen5 halamanHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaBelum ada peringkat
- Image Restoration Techniques Using Fusion To Remove Motion BlurDokumen5 halamanImage Restoration Techniques Using Fusion To Remove Motion Blurrahul sharmaBelum ada peringkat
- Vehicular Ad-Hoc Network, Its Security and Issues: A ReviewDokumen4 halamanVehicular Ad-Hoc Network, Its Security and Issues: A Reviewrahul sharmaBelum ada peringkat
- Space Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud DataDokumen12 halamanSpace Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud Datarahul sharmaBelum ada peringkat
- A Clustering and Associativity Analysis Based Probabilistic Method For Web Page PredictionDokumen5 halamanA Clustering and Associativity Analysis Based Probabilistic Method For Web Page Predictionrahul sharmaBelum ada peringkat
- A Content Based Region Separation and Analysis Approach For Sar Image ClassificationDokumen7 halamanA Content Based Region Separation and Analysis Approach For Sar Image Classificationrahul sharmaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Validation of Analytical Methods for Pharmaceutical AnalysisDokumen20 halamanValidation of Analytical Methods for Pharmaceutical Analysisnohora parradoBelum ada peringkat
- Analysis On Capabilities of Artificial Intelligence (AI) Image Forgery Detection TechniquesDokumen8 halamanAnalysis On Capabilities of Artificial Intelligence (AI) Image Forgery Detection TechniquesInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- K072358 Bioplex 2200 Vasculitis KitDokumen24 halamanK072358 Bioplex 2200 Vasculitis KitwangxuliangBelum ada peringkat
- Clsi GP10 ADokumen36 halamanClsi GP10 ACristian Gutiérrez Vera100% (1)
- Journal of Dental Research: Meta-Analytical Review of Parameters Involved in Dentin BondingDokumen8 halamanJournal of Dental Research: Meta-Analytical Review of Parameters Involved in Dentin BondingTeresa BeltranBelum ada peringkat
- Baremos Faux PassDokumen20 halamanBaremos Faux PassMaria Clara RonquiBelum ada peringkat
- Medical Statistics For MRCP: 1. Basic StatsDokumen15 halamanMedical Statistics For MRCP: 1. Basic StatsvisagaBelum ada peringkat
- The Fim Instrument: Its Background, Structure, and UsefulnessDokumen31 halamanThe Fim Instrument: Its Background, Structure, and UsefulnesssamiratumananBelum ada peringkat
- ERS Handbook-Self-Assessment in Respiratory Medicine, 2e (Sep 1, 2015) - (1849840784) - (European Respiratory Society) .PDF (Konrad E. Bloch, Thomas Brack, Anita K. Simonds)Dokumen560 halamanERS Handbook-Self-Assessment in Respiratory Medicine, 2e (Sep 1, 2015) - (1849840784) - (European Respiratory Society) .PDF (Konrad E. Bloch, Thomas Brack, Anita K. Simonds)Shop Upmed100% (1)
- Aqua AP Julaug151Dokumen66 halamanAqua AP Julaug151Carlos QuastBelum ada peringkat
- Laut ProcedureDokumen33 halamanLaut ProcedureGoutam Kumar DebBelum ada peringkat
- RF-6 ManualDokumen2 halamanRF-6 ManualjpgbfBelum ada peringkat
- PET Performance Measurements Using The NEMA NU 2-2001 StandardDokumen12 halamanPET Performance Measurements Using The NEMA NU 2-2001 StandardCiro LeonBelum ada peringkat
- PID Ziegler-Nichols Paper PDFDokumen12 halamanPID Ziegler-Nichols Paper PDFHeba MohamedBelum ada peringkat
- PrevMed Pretest 9th Ed Highlighted AnswersDokumen95 halamanPrevMed Pretest 9th Ed Highlighted AnswersSeb Seb IIIBelum ada peringkat
- 1.medial Hamstring ReflexDokumen5 halaman1.medial Hamstring ReflexIgnatius EseneBelum ada peringkat
- Simple Nutrition Screening Tool For Pediatric InpatientsDokumen7 halamanSimple Nutrition Screening Tool For Pediatric InpatientsYulmira YulmiraBelum ada peringkat
- Nithya, R., & Santhi, B. (2011) - Classification of Normal Abnormal Patterns in Diginal Mammograms For Diagnosis of Breast CancerDokumen5 halamanNithya, R., & Santhi, B. (2011) - Classification of Normal Abnormal Patterns in Diginal Mammograms For Diagnosis of Breast CancerDwi Rahma YunikaBelum ada peringkat
- Classification and Regression Training with caretDokumen206 halamanClassification and Regression Training with caretSrijan Sharma0% (1)
- Sensory Analysis-Triangle Test: Standard Test Method ForDokumen8 halamanSensory Analysis-Triangle Test: Standard Test Method ForEric GozzerBelum ada peringkat
- Package Insert - 9302513 - D - en - 30125 GDH PDFDokumen11 halamanPackage Insert - 9302513 - D - en - 30125 GDH PDFadybaila4680Belum ada peringkat
- You Answered The Question .: CorrectlyDokumen21 halamanYou Answered The Question .: CorrectlyErika PabustanBelum ada peringkat
- Nutritional Assessment of Critically Ill PatientsDokumen8 halamanNutritional Assessment of Critically Ill PatientskikyfauziaBelum ada peringkat
- CAPSDokumen4 halamanCAPSPratik RanjanBelum ada peringkat
- Module 5 HIV Testing Strategies and AlgorithmDokumen18 halamanModule 5 HIV Testing Strategies and Algorithmmajaliwaanthony7Belum ada peringkat
- Sensitivity and Specificity in Disease Screening TestsDokumen3 halamanSensitivity and Specificity in Disease Screening TestsPrisia AnantamaBelum ada peringkat
- Calibration of Helium Leak Detectors by Use of Secondary StandardsDokumen7 halamanCalibration of Helium Leak Detectors by Use of Secondary StandardsROHITBelum ada peringkat
- Diagnostic Performance of Chest X-Ray For Covid-19 Pneumonia During The Sars-Cov-2 Pandemic in Lombardy, ItalyDokumen2 halamanDiagnostic Performance of Chest X-Ray For Covid-19 Pneumonia During The Sars-Cov-2 Pandemic in Lombardy, ItalyAdityo PrabowoBelum ada peringkat
- Monolisa HCV Ag-Ac UltraDokumen4 halamanMonolisa HCV Ag-Ac UltraSantiagoAFBelum ada peringkat
- What To Know About False Positives in Hepatitis C TestingDokumen9 halamanWhat To Know About False Positives in Hepatitis C TestingFaisal JamshedBelum ada peringkat