Anda mungkin juga menyukai
- Micro 1Dokumen1 halamanMicro 1QUISPE LOAYZA EDWINBelum ada peringkat
- MicroDokumen1 halamanMicroQUISPE LOAYZA EDWINBelum ada peringkat
- Tabla Dinamica BasicoDokumen2 halamanTabla Dinamica BasicoQUISPE LOAYZA EDWINBelum ada peringkat
- Platinas de CobreDokumen1 halamanPlatinas de CobreQUISPE LOAYZA EDWINBelum ada peringkat
- LegisDokumen3 halamanLegisQUISPE LOAYZA EDWINBelum ada peringkat
- Rele Frecuencia 4 EtapasDokumen3 halamanRele Frecuencia 4 EtapasQUISPE LOAYZA EDWINBelum ada peringkat
- Final de LegislacionDokumen19 halamanFinal de LegislacionQUISPE LOAYZA EDWINBelum ada peringkat
- MOROSIDADDokumen7 halamanMOROSIDADQUISPE LOAYZA EDWINBelum ada peringkat
- HorarioDokumen3 halamanHorarioQUISPE LOAYZA EDWINBelum ada peringkat
- Áreas de Las Red EléctricaDokumen6 halamanÁreas de Las Red EléctricaQUISPE LOAYZA EDWINBelum ada peringkat
- Primer DiseñoDokumen1 halamanPrimer DiseñoQUISPE LOAYZA EDWINBelum ada peringkat
- Lectura EconomíaDokumen23 halamanLectura EconomíaJulio Durand JaraBelum ada peringkat
- Mecanismos de Inversión y FinanciamientoDokumen5 halamanMecanismos de Inversión y FinanciamientoQUISPE LOAYZA EDWINBelum ada peringkat
- VistaDokumen1 halamanVistaQUISPE LOAYZA EDWINBelum ada peringkat
- Sistema de Control de Lazo CerradoDokumen7 halamanSistema de Control de Lazo CerradoQUISPE LOAYZA EDWINBelum ada peringkat
- Sistema de Control de Lazo CerradoDokumen21 halamanSistema de Control de Lazo CerradoQUISPE LOAYZA EDWINBelum ada peringkat
- Trabajo GeotecniaDokumen6 halamanTrabajo GeotecniaQUISPE LOAYZA EDWINBelum ada peringkat
- Syllabus UnmsmDokumen4 halamanSyllabus UnmsmQUISPE LOAYZA EDWINBelum ada peringkat
- A.a.1.1 Lab. Maquinas II Exper. 01Dokumen7 halamanA.a.1.1 Lab. Maquinas II Exper. 01QUISPE LOAYZA EDWINBelum ada peringkat
- Configuración Darlington y cálculo de puntos de reposo en circuito amplificadorDokumen7 halamanConfiguración Darlington y cálculo de puntos de reposo en circuito amplificadorQUISPE LOAYZA EDWINBelum ada peringkat
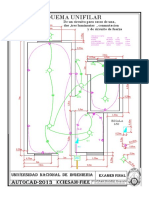
- Esquema unifilar de circuito de alumbrado y fuerzaDokumen1 halamanEsquema unifilar de circuito de alumbrado y fuerzaQUISPE LOAYZA EDWINBelum ada peringkat
- A.a.1.1 Lab. Maquinas II Exper. 01Dokumen7 halamanA.a.1.1 Lab. Maquinas II Exper. 01QUISPE LOAYZA EDWINBelum ada peringkat
- Calidad de energía eléctricaDokumen19 halamanCalidad de energía eléctricaQUISPE LOAYZA EDWINBelum ada peringkat
- 01Dokumen7 halaman01Celin PadillaBelum ada peringkat
- Flujo D EpotenciaDokumen1 halamanFlujo D EpotenciaQUISPE LOAYZA EDWINBelum ada peringkat
- Trabajo N° 1 de InstaDokumen22 halamanTrabajo N° 1 de InstaQUISPE LOAYZA EDWINBelum ada peringkat
- Compensación reactiva localizada para matja de 150kWDokumen3 halamanCompensación reactiva localizada para matja de 150kWQUISPE LOAYZA EDWINBelum ada peringkat
- Anexo 1 - Archivo BaseDokumen4 halamanAnexo 1 - Archivo BaseQUISPE LOAYZA EDWINBelum ada peringkat
- Prac. #1 - Botela de VentasDokumen2 halamanPrac. #1 - Botela de VentasQUISPE LOAYZA EDWINBelum ada peringkat
- Universidad Nacional Mayor de San Marcos - Fiee Condiciones Y Requisitos para La PresentacionDokumen8 halamanUniversidad Nacional Mayor de San Marcos - Fiee Condiciones Y Requisitos para La PresentacionQUISPE LOAYZA EDWINBelum ada peringkat
- Universidad de San Carlos de GuatemalaDokumen7 halamanUniversidad de San Carlos de GuatemalaAbner LucasBelum ada peringkat
- Método CAMDokumen11 halamanMétodo CAMCarlos Felipe Vergara UretaBelum ada peringkat
- Pozo de TierraDokumen4 halamanPozo de TierraAlberto AguirreBelum ada peringkat
- ConceptosbásicosdeelectroterapiaDokumen95 halamanConceptosbásicosdeelectroterapiaHernan Hernández OlayaBelum ada peringkat
- Informe 3 - El Transformador Trifasico Tipo SecoDokumen45 halamanInforme 3 - El Transformador Trifasico Tipo SecoAdrian Arauco CarhuasBelum ada peringkat
- Reporte Práctica 2 FísicaDokumen19 halamanReporte Práctica 2 Físicaricardo reyesBelum ada peringkat
- Ejercicios ResueltosDokumen19 halamanEjercicios ResueltosAndrés AndretichBelum ada peringkat
- Vatimetro RFDokumen9 halamanVatimetro RFjosecentenoBelum ada peringkat
- Laboratorio Aparatos de Medición EléctricosDokumen6 halamanLaboratorio Aparatos de Medición EléctricosOsmar Tolosa RuizBelum ada peringkat
- XXXDokumen12 halamanXXXIndhiraHolaBelum ada peringkat
- Polarización Transistor BJTDokumen3 halamanPolarización Transistor BJTJosué Arce SotoBelum ada peringkat
- PROCEDIMIENTO de Montaje de Transformadores de PotenciaDokumen20 halamanPROCEDIMIENTO de Montaje de Transformadores de Potenciajcastroh2694% (32)
- Método Del MTC para El Diseño de Pavimentos FlexiblesDokumen15 halamanMétodo Del MTC para El Diseño de Pavimentos FlexiblesOsmary Sanchez100% (2)
- ProyectoDokumen65 halamanProyectoJORDAN FABRICIO GAROFALO MOREIRABelum ada peringkat
- Guía de Práctica de Laboratorio #2Dokumen4 halamanGuía de Práctica de Laboratorio #2Mary SandCastBelum ada peringkat
- Mecanismos Basicos de RupturaDokumen11 halamanMecanismos Basicos de RupturaLuis Alberto Jara SegoviaBelum ada peringkat
- Transformador: Resistencia devanadosDokumen6 halamanTransformador: Resistencia devanadoszama23Belum ada peringkat
- Lineas ElectricasDokumen19 halamanLineas ElectricaswilliamIIBelum ada peringkat
- Resumen Amplificadores de BiopotenciaDokumen4 halamanResumen Amplificadores de BiopotenciaJuan GutierrezBelum ada peringkat
- Tarea 1 Jhaider Perea ElectromagnetismoDokumen8 halamanTarea 1 Jhaider Perea Electromagnetismojaider pereaBelum ada peringkat
- Manual Electrico Viakon - Capitulo 1Dokumen202 halamanManual Electrico Viakon - Capitulo 1DiegoFernandoValeroBelum ada peringkat
- Diseño de Via Seca Shotcrete UCDokumen140 halamanDiseño de Via Seca Shotcrete UCLuisín LeónBelum ada peringkat
- Intensidad de CortocircuitoDokumen10 halamanIntensidad de CortocircuitoLuis Nests HeirdernBelum ada peringkat
- Mantenimiento A TransformadoresDokumen2 halamanMantenimiento A Transformadoresadriana galvanBelum ada peringkat
- Ejercicios de CalorDokumen9 halamanEjercicios de CalorDoménica LaínezBelum ada peringkat
- Fundamento de Funcionamiento Celdas de CargaDokumen7 halamanFundamento de Funcionamiento Celdas de CargaLeandro CorreaBelum ada peringkat
- Amplificador HiFi clase D de hasta 1250W RMSDokumen12 halamanAmplificador HiFi clase D de hasta 1250W RMSLiam Siles Nuñez100% (1)
- Interruptores y conmutadores FR3 24-36KVDokumen4 halamanInterruptores y conmutadores FR3 24-36KVFrancisco Mendoza SaldarriagaBelum ada peringkat
- Curso Electricidad Basica PDFDokumen27 halamanCurso Electricidad Basica PDFJose GomezBelum ada peringkat
- Guía de Ejercicios Aula N 1.2 PDFDokumen5 halamanGuía de Ejercicios Aula N 1.2 PDFJaviier KooBelum ada peringkat