Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- THE Ketofeed Diet Book v2Dokumen43 halamanTHE Ketofeed Diet Book v2jacosta12100% (1)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Massey Ferguson MF7600 Technician Workshop ManualDokumen798 halamanMassey Ferguson MF7600 Technician Workshop Manualgavcin100% (5)
- Grange Fencing Garden Products Brochure PDFDokumen44 halamanGrange Fencing Garden Products Brochure PDFDan Joleys100% (1)
- HBS - Zara Fast Fashion Case Write UpDokumen4 halamanHBS - Zara Fast Fashion Case Write Upaaronhwalton100% (1)
- Introduction To Bond Graph Theory - IDokumen34 halamanIntroduction To Bond Graph Theory - IKunwar Faraz AhmedBelum ada peringkat
- ISO 11064-12000 Ergonomic Design of Control Centres - Part 1 Principles For The Design of Control Centres by ISO TC 159SC 4WG 8Dokumen6 halamanISO 11064-12000 Ergonomic Design of Control Centres - Part 1 Principles For The Design of Control Centres by ISO TC 159SC 4WG 8marcianocalvi4611100% (2)
- 28 ESL Discussion Topics Adult StudentsDokumen14 halaman28 ESL Discussion Topics Adult StudentsniallBelum ada peringkat
- Claudio MonteverdiDokumen2 halamanClaudio MonteverdiBrendan LynchBelum ada peringkat
- 2 Beats Per Measure 3 Beats Per Measure 4 Beats Per MeasureDokumen24 halaman2 Beats Per Measure 3 Beats Per Measure 4 Beats Per MeasureArockiya StephenrajBelum ada peringkat
- Paso de Blas Lying in Clinic For NewDokumen5 halamanPaso de Blas Lying in Clinic For NewNaheed Dean MustafaBelum ada peringkat
- Bond GraphDokumen11 halamanBond GraphNaveen SaharanBelum ada peringkat
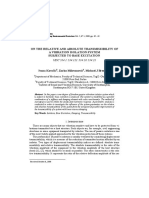
- On The Relative and Absolute Transmissibility of A Vibration Isolation System Subjected To Base ExcitationDokumen10 halamanOn The Relative and Absolute Transmissibility of A Vibration Isolation System Subjected To Base ExcitationNaveen SaharanBelum ada peringkat
- Lecture 24 PDFDokumen2 halamanLecture 24 PDFNaveen SaharanBelum ada peringkat
- Ergonomics Best Practices: For ManufacturingDokumen14 halamanErgonomics Best Practices: For ManufacturingGreen SkyBelum ada peringkat
- Ergonomics Best Practices: For ManufacturingDokumen14 halamanErgonomics Best Practices: For ManufacturingGreen SkyBelum ada peringkat
- Cambridge IGCSE Physics 0625 Complete Notes PDokumen5 halamanCambridge IGCSE Physics 0625 Complete Notes PYamikani ManthandoBelum ada peringkat
- UniFi Quick GuideDokumen2 halamanUniFi Quick GuideAndhika TharunaBelum ada peringkat
- 2005 Warehouse Benchmark in GR PTDokumen59 halaman2005 Warehouse Benchmark in GR PTMarco Antonio Oliveira NevesBelum ada peringkat
- 2019q123.ev3-Descon Engro Level Gauges-QDokumen7 halaman2019q123.ev3-Descon Engro Level Gauges-Qengr_umer_01Belum ada peringkat
- Bubble SortDokumen6 halamanBubble SortRollin RevieBelum ada peringkat
- STS Reviewer FinalsDokumen33 halamanSTS Reviewer FinalsLeiBelum ada peringkat
- Check List For Design Program of A Parish ChurchDokumen11 halamanCheck List For Design Program of A Parish ChurchQuinn HarloweBelum ada peringkat
- Professional Development Objectives Related To Modalities Specific TopicsDokumen3 halamanProfessional Development Objectives Related To Modalities Specific TopicsCris100% (1)
- NUFLO Low Power Pre-Amplifier: SpecificationsDokumen2 halamanNUFLO Low Power Pre-Amplifier: SpecificationsJorge ParraBelum ada peringkat
- Complex Poly (Lactic Acid) - Based - 1Dokumen20 halamanComplex Poly (Lactic Acid) - Based - 1Irina PaslaruBelum ada peringkat
- DocumentationDokumen44 halamanDocumentation19-512 Ratnala AshwiniBelum ada peringkat
- Research Paper Effect of Mobile Banking On Customer-823Dokumen11 halamanResearch Paper Effect of Mobile Banking On Customer-823amittaneja28Belum ada peringkat
- Al Multaqaa Presentation v2Dokumen22 halamanAl Multaqaa Presentation v2Hasaan WaheedBelum ada peringkat
- COSO DefinEDDokumen21 halamanCOSO DefinEDRefdy AnugrahBelum ada peringkat
- Biography of Anna HazareDokumen4 halamanBiography of Anna HazareGenesis FirstBelum ada peringkat
- Asme Bladder Accumulator DatasheetDokumen3 halamanAsme Bladder Accumulator DatasheetSamad A BakarBelum ada peringkat
- Thom22e ch03 FinalDokumen44 halamanThom22e ch03 FinalDionisius AlvianBelum ada peringkat
- Education Programme: The School of Concrete TechnologyDokumen28 halamanEducation Programme: The School of Concrete TechnologyThabiso Jacob MokwenaBelum ada peringkat
- APS PresentationDokumen32 halamanAPS PresentationRozack Ya ZhackBelum ada peringkat
- Police Cranston School Committee Member Stole PTO FundsDokumen1 halamanPolice Cranston School Committee Member Stole PTO FundsashaydelineBelum ada peringkat
- Expansions Meet Health Care Needs: Economists Question Trump Plan FiguresDokumen10 halamanExpansions Meet Health Care Needs: Economists Question Trump Plan FiguresThe Daily Tar HeelBelum ada peringkat