Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Mrit Devops Full Notes PDFDokumen214 halamanMrit Devops Full Notes PDFdheerajakhil2003Belum ada peringkat
- May Jun 2022-1Dokumen4 halamanMay Jun 2022-1Sarthak JoshiBelum ada peringkat
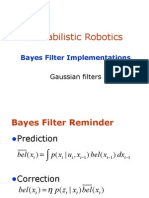
- Probabilistic Robotics: Bayes Filter ImplementationsDokumen61 halamanProbabilistic Robotics: Bayes Filter ImplementationsMatt Brian CapangpanganBelum ada peringkat
- rr321502 Mathematical Modelling and SimulationDokumen8 halamanrr321502 Mathematical Modelling and SimulationSRINIVASA RAO GANTABelum ada peringkat
- 3 Dof Thermodynamics TableDokumen86 halaman3 Dof Thermodynamics TableAliBelum ada peringkat
- UAE National Program For AI - AIGuideDokumen39 halamanUAE National Program For AI - AIGuideFabián Araneda BaltierraBelum ada peringkat
- Control System Lab Manual EC Branch (KEC-652)Dokumen33 halamanControl System Lab Manual EC Branch (KEC-652)MOHD TAUKIR ANSARIBelum ada peringkat
- AC Star Rating 1.5 Ton June 23 2009Dokumen3 halamanAC Star Rating 1.5 Ton June 23 2009Harpal ParmarBelum ada peringkat
- Enhancement of Automotive Penetration Testing With Threat Analyses ResultsDokumen17 halamanEnhancement of Automotive Penetration Testing With Threat Analyses Resultsrt1220011Belum ada peringkat
- Profit HRDokumen369 halamanProfit HRseminarskiiBelum ada peringkat
- STEM J4 - 1st Laws of ThermodynamicsDokumen35 halamanSTEM J4 - 1st Laws of ThermodynamicsShan Michael Sta. AnaBelum ada peringkat
- ELEC4410 Control System Design Revision NotesDokumen10 halamanELEC4410 Control System Design Revision Notescjman404Belum ada peringkat
- A. Rupasri (20NE1A0510) Sk. Rehamunnisha (20NE1A0539) D. Sai Supriya (20NE1A0542) Sk. Mohammad Fahim (20NE1A0551)Dokumen20 halamanA. Rupasri (20NE1A0510) Sk. Rehamunnisha (20NE1A0539) D. Sai Supriya (20NE1A0542) Sk. Mohammad Fahim (20NE1A0551)pallapothusindhu2002Belum ada peringkat
- Long Short-Term Memory (LSTM)Dokumen25 halamanLong Short-Term Memory (LSTM)ujjwal kumarBelum ada peringkat
- JD For Software DeveloperDokumen3 halamanJD For Software DeveloperAbhijeet KumarBelum ada peringkat
- BI 10 HurisDokumen47 halamanBI 10 HurisThiran VinharBelum ada peringkat
- System 1Dokumen78 halamanSystem 1aabp perera100% (2)
- The Lean Agile and World Class Manufacturing CookbookDokumen107 halamanThe Lean Agile and World Class Manufacturing CookbookShanmugam Balasubramaniam100% (1)
- Makalah Termodinamika IIIDokumen33 halamanMakalah Termodinamika IIIdata laptop asusBelum ada peringkat
- Difference Between Quality Assurance (QA) and Quality Control (QC) - Software Testing ClassDokumen3 halamanDifference Between Quality Assurance (QA) and Quality Control (QC) - Software Testing ClassshadabBelum ada peringkat
- Physics 406: Winter, 2016Dokumen3 halamanPhysics 406: Winter, 20160pt618Belum ada peringkat
- Robo JuniorDokumen6 halamanRobo JuniorThariq HussainBelum ada peringkat
- Science 9 - Q4 - Week 5Dokumen17 halamanScience 9 - Q4 - Week 5Rhyan Zero-four BaluyutBelum ada peringkat
- Hand Out Material in General Chemistry 2Dokumen10 halamanHand Out Material in General Chemistry 2Alette Cyrell CorpuzBelum ada peringkat
- Competitive Networks - The Kohonen Self-Organising MapDokumen6 halamanCompetitive Networks - The Kohonen Self-Organising Mapwert21Belum ada peringkat
- Agile AnswerDokumen7 halamanAgile AnswerSudarshanBelum ada peringkat
- Old Concepts and New Approaches in The Treatment of OffendersDokumen5 halamanOld Concepts and New Approaches in The Treatment of OffendersChristopher PerazBelum ada peringkat
- WebtocDokumen4 halamanWebtocSayed NagyBelum ada peringkat
- Single Image Super-Resolution Using Deep LearningDokumen1 halamanSingle Image Super-Resolution Using Deep LearningSighman SaysBelum ada peringkat
- 133br - Signals and SystemsDokumen8 halaman133br - Signals and Systemsjalajakshi YBelum ada peringkat