Anda mungkin juga menyukai
- ZCS-PWM Converter For Reducing Switching Losses: Subi SDokumen7 halamanZCS-PWM Converter For Reducing Switching Losses: Subi SInternational Organization of Scientific Research (IOSR)Belum ada peringkat
- Design A Single Phase Inverter With A LCL Filter: AbstractDokumen4 halamanDesign A Single Phase Inverter With A LCL Filter: AbstractPham Viet QuanBelum ada peringkat
- Fly-Back Converter 2012Dokumen26 halamanFly-Back Converter 2012pn82verBelum ada peringkat
- Zero Voltage Switching Active Clamp Buck-BoostDokumen10 halamanZero Voltage Switching Active Clamp Buck-Boostranjitheee1292Belum ada peringkat
- Soft SwitchingDokumen6 halamanSoft SwitchingR.k. Rahul KumarBelum ada peringkat
- Sandy 123Dokumen9 halamanSandy 123Sandy RonaldoBelum ada peringkat
- A New Single Switch Buck-Boost Type DC-DC ConverterDokumen4 halamanA New Single Switch Buck-Boost Type DC-DC ConverterRaveendhra IitrBelum ada peringkat
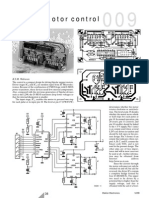
- Driver L297 + L6203Dokumen2 halamanDriver L297 + L6203TatiiieleeeBelum ada peringkat
- Development of Multi-Mode Step Down DC/DC Converters With Fault-Tolerant CapabilityDokumen7 halamanDevelopment of Multi-Mode Step Down DC/DC Converters With Fault-Tolerant Capabilityjeos20132013Belum ada peringkat
- Snubber FlybackDokumen5 halamanSnubber Flybackandrevaz91Belum ada peringkat
- Ep 24889895Dokumen7 halamanEp 24889895efremofeBelum ada peringkat
- Designing A Boost-Switching Regulator With The MCP1650Dokumen0 halamanDesigning A Boost-Switching Regulator With The MCP1650Asad MalikBelum ada peringkat
- Asymmetrical Full-Bridge ConverterDokumen9 halamanAsymmetrical Full-Bridge ConverterAthiesh KumarBelum ada peringkat
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDokumen7 halamanAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseBelum ada peringkat
- Topic 3 LynchDokumen26 halamanTopic 3 Lynchsunil251Belum ada peringkat
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDokumen6 halamanZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- A Single Phase Power Factor Correction ConverterDokumen30 halamanA Single Phase Power Factor Correction ConverterAnanth NoorithayaBelum ada peringkat
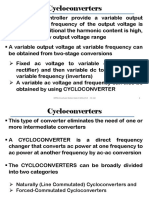
- Lecture 03 - CycloconvertersDokumen29 halamanLecture 03 - CycloconvertersdaudiBelum ada peringkat
- Design and Simulation of Pulse-Width Modulated ZETA Converter With Power Factor CorrectionDokumen7 halamanDesign and Simulation of Pulse-Width Modulated ZETA Converter With Power Factor CorrectionRama KrishnaBelum ada peringkat
- A Family of PWM Soft-Single-Switched Converters With Low Voltage and Current StressesDokumen6 halamanA Family of PWM Soft-Single-Switched Converters With Low Voltage and Current StressesRushikeshKatkarBelum ada peringkat
- 12 - L-22 (DP) (Pe) ( (Ee) Nptel)Dokumen1 halaman12 - L-22 (DP) (Pe) ( (Ee) Nptel)CharkBelum ada peringkat
- Auxxilyary Switch ControlDokumen4 halamanAuxxilyary Switch ControlMilan StefanovicBelum ada peringkat
- Lin 2013Dokumen12 halamanLin 2013Pavan Singh TomarBelum ada peringkat
- Non-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadDokumen7 halamanNon-Isolated Bidirectional Zero-Voltage Switching DC-DC Converter by Gopal PrasadGopal Prasad BansalBelum ada peringkat
- ZVS Full BridgeDokumen20 halamanZVS Full Bridgejameschall1Belum ada peringkat
- Self Oscillating Flyback ConverterDokumen7 halamanSelf Oscillating Flyback ConverterNaren DranBelum ada peringkat
- An Isolated Interleaved Active-Clamp ZVT Flyback-Boost Converter With Coupled InductorsDokumen9 halamanAn Isolated Interleaved Active-Clamp ZVT Flyback-Boost Converter With Coupled InductorsTuấn Anh PhạmBelum ada peringkat
- Switched Mode Regulated Power Supply (SMPS)Dokumen36 halamanSwitched Mode Regulated Power Supply (SMPS)Vipin NathBelum ada peringkat
- 1MHz FlybackDokumen5 halaman1MHz FlybackMùi MạcBelum ada peringkat
- L-22 (DP) (Pe) ( (Ee) Nptel)Dokumen15 halamanL-22 (DP) (Pe) ( (Ee) Nptel)RyanLee01Belum ada peringkat
- High-Frequency Soft-Switching DC-DC Converters For Voltage and Current DC Power SourcesDokumen18 halamanHigh-Frequency Soft-Switching DC-DC Converters For Voltage and Current DC Power SourcesFaraz AhmadBelum ada peringkat
- An 7517Dokumen9 halamanAn 7517MallickarjunaBelum ada peringkat
- Boost-Buck Push-Pull Converter For Very Wide Input Range Single Stage Power ConversionDokumen6 halamanBoost-Buck Push-Pull Converter For Very Wide Input Range Single Stage Power ConversionHoang TuanBelum ada peringkat
- SSCB 1Dokumen5 halamanSSCB 1KARTHIK NBelum ada peringkat
- Topic Assignment1Dokumen6 halamanTopic Assignment1cuongakamarineBelum ada peringkat
- Design Considerations For An LLC Resonant ConverterDokumen29 halamanDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356Belum ada peringkat
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDokumen13 halamanDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luBelum ada peringkat
- Comparison and Simulation of Full Bridge and LCL-T Buck DC-DC Converter SystemsDokumen5 halamanComparison and Simulation of Full Bridge and LCL-T Buck DC-DC Converter SystemsKrishnaveni Subramani SBelum ada peringkat
- A Single Phase, Single Stage Three Level Boost DC - DC ConverterDokumen5 halamanA Single Phase, Single Stage Three Level Boost DC - DC Converterijsret100% (1)
- Novel Zero-Current-Switching (ZCS) PWM Switch Cell Minimizing Additional Conduction LossDokumen6 halamanNovel Zero-Current-Switching (ZCS) PWM Switch Cell Minimizing Additional Conduction Lossashish88bhardwaj_314Belum ada peringkat
- Flyback PDFDokumen11 halamanFlyback PDFlucianoBelum ada peringkat
- Synchronous Rectification With Flyback and Forward ConvertersDokumen26 halamanSynchronous Rectification With Flyback and Forward ConverterszwolfBelum ada peringkat
- Elk331e CH7Dokumen68 halamanElk331e CH7Erdem DanacıBelum ada peringkat
- DC DC ConvertersDokumen36 halamanDC DC ConvertersLindeberg Vital100% (1)
- Buck and Boost Converter Using PSPICEDokumen9 halamanBuck and Boost Converter Using PSPICEmohanrajgupta19100% (1)
- Chapter 3Dokumen46 halamanChapter 3Tewodros ShegawBelum ada peringkat
- Chapter 3Dokumen46 halamanChapter 3Tewodros ShegawBelum ada peringkat
- A Novel ZVS Bidirectional DC-DC Converter For Fuel Cell ApplicationsDokumen4 halamanA Novel ZVS Bidirectional DC-DC Converter For Fuel Cell ApplicationsS B RajBelum ada peringkat
- Introductidn.: THE Effects of Leakage Inouctance On Switching Power Supply PerformanceDokumen8 halamanIntroductidn.: THE Effects of Leakage Inouctance On Switching Power Supply PerformanceAnonymous Ek100RdbcHBelum ada peringkat
- Isolated Boost Converters: Yungtaek Jang and Milan M. JovanovićDokumen7 halamanIsolated Boost Converters: Yungtaek Jang and Milan M. JovanovićRobbi AlamsyahBelum ada peringkat
- Ef50287299d8cd2 EkDokumen6 halamanEf50287299d8cd2 EkTedBelum ada peringkat
- ELECTRON DEVICES-Power DevicesDokumen58 halamanELECTRON DEVICES-Power DevicesSekar GanapathyBelum ada peringkat
- Ust8Lab: &" .RR, R T,.t,. S,/. !, L/, D-GR . T F F,"',4i18' - #+..Dokumen5 halamanUst8Lab: &" .RR, R T,.t,. S,/. !, L/, D-GR . T F F,"',4i18' - #+..GiancarloRichardRivadeneyraMirandaBelum ada peringkat
- Power Electronics 1-2015bjrDokumen80 halamanPower Electronics 1-2015bjrNurAdiFirawanBelum ada peringkat
- Cuk For Power Factor CorrectionDokumen4 halamanCuk For Power Factor CorrectionRichard MadandaBelum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDari EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsPenilaian: 3 dari 5 bintang3/5 (2)
- MSCI603 F2015 01 - IntroDokumen30 halamanMSCI603 F2015 01 - IntroNafiz AhmedBelum ada peringkat
- Isolated Switch-Mode DC/DC Converters DC Power Supply ControlDokumen86 halamanIsolated Switch-Mode DC/DC Converters DC Power Supply ControlNafiz AhmedBelum ada peringkat
- Homework 1 KeyDokumen7 halamanHomework 1 KeyNafiz AhmedBelum ada peringkat
- Structure of Atom: Mohammad Akter Hossain Lecturer, Dept. of MNS Brac UniversityDokumen66 halamanStructure of Atom: Mohammad Akter Hossain Lecturer, Dept. of MNS Brac UniversityNafiz AhmedBelum ada peringkat
- Microelectronic Circuits 5th Sedra SmithDokumen1 halamanMicroelectronic Circuits 5th Sedra SmithNafiz Ahmed40% (10)