Ar 19
Diunggah oleh
batipibe200Judul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Ar 19
Diunggah oleh
batipibe200Hak Cipta:
Format Tersedia
Sociedad Mexicana de Ingeniera Estructural
OBTENCIN DE LA RIGIDEZ ELSTICA DE BARRAS FORMADAS POR SEGMENTOS DE
SECCIN VARIABLE NO COLINEALES.
Monroy Miranda Fernando 1 , Rodrguez Vega Miguel ngel 2
RESUMEN
Se presenta la obtencin de la matriz de flexibilidad de barras de seccin variable formadas por segmentos no
colineales mediante la aplicacin de la matriz de transporte para fuerzas y desplazamientos, para la evaluacin
de los coeficientes de flexibilidad se recurre a la integracin numrica. Como resultado de esta metodologa se
obtienen los coeficientes de rigidez, factores de transporte y momentos de empotramiento para este tipo de
barras, este planteamiento permite considerar, por ejemplo, el efecto de arco en elementos estructurales de
seccin variable.
Se hace una comparacin de los resultados obtenidos al modelar barras de seccin variable formadas por
segmentos no colineales como vigas que cumplen con la teora de Euler-Bernoull, con respecto a soluciones
presentadas por otros autores y tambin con las obtenidas utilizando elementos finitos.
Tambin se incluyen algunos ejemplos cuyos resultados, obtenidos con la metodologa propuesta, son
comparados con los proporcionados por la literatura especializada en el tema.
Este trabajo demuestra que, junto con aplicacin de las matrices de transporte y de la integracin numrica, la
teora de Euller-Bernoull permite modelar segmentos de barras de seccin variable, obtenindose las
rigideces elsticas y momentos de empotramiento de barras formadas por segmentos de seccin variable no
colineales, proporcionando resultados comparables con los obtenidos a partir de formulaciones basadas, por
ejemplo, en elementos finitos.
ABSTRACT
The obtaining of the flexibility matrix of variable section bars formed by non collinear segments is presented
by means of the application of the transport matrix for forces and displacements, for flexibility coefficients
evaluation it is appealed to the numeric integration. As a result of this methodology, rigidity coefficients,
transport factors and fixed end moments are obtained for this kind of bars, this position allows to consider, for
example, the "arch" effect in this type of structural elements.
There is made a comparison of the results obtained by modeling bars of variable section formed by non
collinear segments like beams that fulfill Euler-Bernoull theory, with regard to solutions presented by other
authors and also with those obtained using finite elements.
There are also included some examples whose results, obtained with the proposed methodology, they are
compared with the proportionate ones by the literature specialized in the topic.
This work demonstrates that although the application of transport matrix and the numeric integration the
Euller-Bernoull theory allows modeling segments of variable section bars, the elastic rigidities and fixed end
Profesor de la Facultad de Ingeniera de la UNAM Departamento de Estructuras, Divisin de Ingeniera
Civil, Topogrfica y Geodsica; Facultad de Ingeniera, Circuito Escolar, Cd. Universitaria, Mxico, D. F.,
04510 Tel.: (55) 5622-8002, email: fmonroy@prodigy.net.mx
Profesor de la Facultad de Ingeniera de la UNAM Departamento de Estructuras, Divisin de Ingeniera
Civil, Topogrfica y Geodsica; Facultad de Ingeniera, Circuito Escolar, Cd. Universitaria, Mxico, D. F.,
04510 Tel.: (55) 5622-8002, email: miguelar@servidor.unam.mx
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
moments of bars formed by non collinear variable section segments being obtained, providing results
comparable with those obtained starting from based formulations, for example, in finite element analysis.
INTRODUCCIN
Durante las ltimas dcadas, la ingeniera estructural, en su momento, ha utilizado mtodos confiables de
anlisis elstico que han permitido modelar satisfactoriamente, cuando ha sido el caso, a los elementos de
seccin variable, de manera que, la determinacin de elementos mecnicos, deformaciones y desplazamientos
mediante los mtodos propuestos por varios especialistas en el tema permiten disear adecuadamente a este
tipo de elementos. En principio, varios son los autores que, durante el siglo pasado, desarrollaron varias
ayudas de diseo, como las conocidas tablas publicadas por la Portland Cement Association (PCA, 1958), en
donde se presentan constantes de rigideces, factores de transporte y momentos de empotramiento de
elementos de seccin variable (Handbook, 1958). Dadas las limitaciones propias de esa poca con relacin
a efectuar clculos extensivos, en las tablas de la PCA se hicieron varias hiptesis para simplificar el
problema, mismas que, para ciertos casos, pueden llevar a errores significativos en la determinacin de los
factores de rigidez (Tena-Colunga, 1996), por lo que Tena (1996) propuso unas nuevas ayudas de diseo que
pueden sustituir, en parte, a las anteriores tablas de la PCA.
Una formulacin rigurosa para elementos de seccin variable con secciones transversales cajn e I, basada en
la teora clsica de vigas de Euler-Bernoulli para elementos bidimensionales sin incluir deformaciones axiales
propuesta primeramente por Just (1977), fue producto de la evolucin en el estudio de este tipo de problemas,
Tena (2002) hace un resumen de las principales formulaciones que se han realizado en este sentido.
Aunque se han propuesto varias alternativas de solucin a este tipo de problemas, a la fecha, prcticamente,
dos han sido las vertientes que ms se han seguido para resolver problemas de anlisis estructural elstico de
barras de seccin variable (Figura 1), la primera (siendo la ms utilizada), por ejemplo, con fundamento en la
teora de Euler-Bernoull ha permitido definir las matrices elsticas de rigidez en dos y tres dimensiones
(Tena, 1996), la segunda, basada en una aplicacin del mtodo del elemento finito tambin ha sido propuesta
(Yang y Yau, 1987, Rajase Karon, 1994).
Y
x
Z
h0
Z
X
h(x)
h=h(x)
X
Iy=Iy(x) Jx=Jx(x)
A=A(x) Iz=Iz(x)
Acy=Acy(x)
Acz=Acz(x)
Figura 1. Barra de seccin transversal variable.
Tena (2002) reporta que, en esta segunda vertiente, Balkaya (2001) present un estudio paramtrico
principalmente enfocado al comportamiento de trabes acarteladas de seccin T utilizando elementos finitos
tridimensionales en donde us, como herramienta de cmputo, el programa SAP90. Como resultado de su
estudio, Balkaya propuso un modelo prctico de trabes acarteladas para el anlisis estructural de marcos,
utilizando un elemento finito tipo viga de dos nodos, con base en un concepto de longitud efectiva definida a
partir de pruebas de intento-error, Tena (2002) considera que, el modelado prctico de trabes acarteladas
propuesto por Balkaya utilizando otro elemento finito tipo viga con longitudes equivalentes es poco
afortunado y opin que el modelado prctico de Balkaya es fruto de promover al mtodo de los elementos
finitos como la nica solucin analtica confiable para elementos de seccin variable, adems, siendo este un
mtodo poco prctico.
Sociedad Mexicana de Ingeniera Estructural
Pese a lo anterior, el trabajo de Balkaya (2001) contiene informacin interesante, en particular demuestra que,
para elementos de seccin variable, la discontinuidad o variacin de la ubicacin de su eje neutro elstico a
travs de su longitud favorece, tanto una distribucin no lineal de esfuerzos a travs de su seccin transversal
como el acoplamiento de esfuerzos de flexin y carga axial (Figura 2) por el efecto que se conoce como
accin de arco, es decir, a medida que se aumenta el ngulo de acartelamiento, el trazo del eje neutro elstico
de la seccin tiende a asemejarse al de un arco sobre todo si la variacin de la seccin es parablica, por lo
que en un caso extremo, la trabe acartelada tiende a comportarse como un arco (Figura 3). Balkaya muestra
que para el caso de trabes acarteladas de seccin T, la variacin en la ubicacin del eje centroidal produce una
profundidad de arco pequea que resulta en un acoplamiento menor en cargas axiales en comparacin al
que se presenta cuando la seccin es rectangular.
Figura 2. Distribucin tpica de esfuerzos normales en la unin viga-columna de cartelas de seccin T
(Balkaya, 2001)
Fx A 0
Fx B = 0
Fx A = 0
Fx B 0
23,6
eje de la barra
a) Sin acartelamiento
ausencia de arco
"arco"
b) Con acartelamiento "pequeo"
Fx B 0
Fx A 0
"arco"
c) Con mayor acartelamiento
Figura 3. Accin de arco en trabes acarteladas debido a la variacin de su eje neutro.
En el problema que nos ocupa, cuando se presenta el efecto de arco ste conduce a que el eje neutro de los
segmentos de seccin variable no sean colineales (acoplamiento axial-flexin), con la idea de dejar la
aplicacin del mtodo del elemento finito para otro tipo de problemas (bsicamente por razones prcticas),
por lo que, en un principio pudiera pensarse en resolver a la barra como un sistema hiperesttico formado por
una serie de segmentos (de seccin variable) considerando como incgnitas los desplazamientos del extremo
libre de cada segmento (mtodo de las rigideces), ver Figura 4. Esta propuesta tiene el inconveniente de
introducir tres o seis ecuaciones adicionales, por cada unin de segmentos no colineales segn se trate de un
problema plano o tridimensional respectivamente.
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
{d 2} = ?
{d 1} = ?
2
i
{d i} = ?
Figura 4. Discretizacin de una barra en segmentos de seccin variable.
Una propuesta que elimina el inconveniente de la anterior es obtener la matriz de rigidez de toda la barra la
cual, por ejemplo, puede conseguirse a partir de su matriz de flexibilidad, esta ltima puede obtenerse de la
matriz de flexibilidad de cada segmento y, desde luego, considerar la variacin de las propiedades
geomtricas y elsticas de cada segmento y la posibilidad de que su eje centroidal pudiera ser no colineal.
La submatriz de flexibilidad en un extremo de toda la barra puede ser obtenida mediante el transporte de
desplazamientos (flexibilidades) de cada segmento al extremo de la barra, invirtindola se obtiene la
submatriz de rigidez de ese extremo y, por ejemplo, transportando estas fuerzas (rigideces) al otro extremo de
la barra se obtienen las dems submatrices para as completar la matriz de rigidez de toda la barra. Una
manera cmoda de realizar esos transportes, tanto de fuerzas como de desplazamientos, es mediante las
matrices de transporte.
MATRICES DE TRASLACIN O DE TRANSPORTE DE FUERZAS
Como sabemos, fuerzas y desplazamientos pueden ser trasladados de un punto a otro usando matrices de
transporte o de translacin. Para ello, consideremos un conjunto de acciones en el punto A (Figura 5.a)
mediante la adicin de un conjunto de acciones iguales, opuestas y no colineales en 0 y A se obtiene un
conjunto de acciones estticamente equivalentes en 0 (Figura 5.b), como sabemos, existe una relacin entre
las acciones en A y 0.
F yA
M zA
Y
FxA
F yA
FxA
A
u = xA x 0
M zA
A (xA , yA )
FxA
Fy0
v = y A y0
Mz A
F yA
Fx0
Mz 0
a) Acciones en A
b) Acciones estticamente equivalentes en 0, acciones nulas en A
Figura 5. Transporte de fuerzas.
Con relacin a la Figura 5.b se tiene que:
Sociedad Mexicana de Ingeniera Estructural
Mz 0 = Mz A Fx A ( y A y 0 ) + Fy A ( x A x0 )
Fx0 = Fx A
Fy 0 = Fy A
(1)
(2)
(3)
Las ecuaciones (1) a (3) se pueden representar matricialmente de la siguiente manera
1
0
0 Fx A
Fx0
0
1
0 Fy A
Fy 0 =
Mz ( y y ) ( x x ) 1 Mz
A
A
0
0
0
A
(4)
Es decir
{F0} = [TFA0] {FA}
(5)
{FA} = [TF0A] {F0}
(6)
[TF0A] = [TFA0]-1
(7)
MATRIZ DE TRANSPORTE O DE TRASLACIN DE DESPLAZAMIENTOS
Ahora consideremos un conjunto de desplazamientos en el punto A (Figura 6.a) de la barra rgida A0, si no
ocurre rotacin, una traslacin en A causa idntica traslacin en 0. El efecto de la rotacin 2 se muestra en la
Figura 6.b.
Y
Y
y A
xA
A (x A , y A )
zA
zA
X
0 ( x0 , y 0 )
v
X
y = u z A
x = v z A
a) Desplazamiento del punto A
b) Efecto de zA
Figura 6. Transporte de desplazamientos.
Nuevamente, pero ahora con relacin a la Figura 6.b tenemos que:
y = ( x A x0 ) z A
(8)
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
x = ( y A y 0 ) z A
(9)
x0 = x A + x = x A + ( y A y 0 ) z A
(10)
y 0 = y A + y = y A ( x A x0 ) z A
(11)
z 0 = z A
(12)
En forma matricial se tiene
x0 1 0 ( y A y 0 ) x A
y 0 = 0 1 ( x A x0 ) y A
z 0 0
z A
1
0
(13)
{D0} = [TDA0] {DA}
(14)
MATRIZ [fBB] DE BARRAS EN SERIE (SEGMENTOS DE SECCIN VARIABLE)
Para la barra formada por segmentos de eje recto (de seccin constante o no) no colineales (Figura 7) la
submatriz de flexibilidad del extremo B ([fBB]) puede obtenerse a partir de la submatriz de flexibilidad de cada
segmento (referida a su sistema coordenado local) transformada al sistema global de toda la barra y
transportada al extremo B de sta (Figura 8), lo anterior conduce a la expresin (15) obtenida por Damy
(1981).
Yi'
Y2'
X i'
Sistemas coordenados
locales
X 2'
Yi'
Xn
A
Y
Yn
X i'
Sistema coordenado
global
Figura 7. Barra formada por segmentos de eje recto no colineales.
[ f BB ]= [H Bi ]T [ f BB ]i [H Bi ]
n
(15)
i =1
De cada barra se conoce [fBB]i (referida a su sistema local), tambin se conoce la matriz de transformacin.
Para una barra en 2D es ampliamente conocido que, la matriz de transformacin est definida por la ecuacin
(16) cuyos elementos se representan en la Figura 9, de tal manera que, la transformacin de [fBB]i a globales
se realiza aplicando la expresin (17).
Sociedad Mexicana de Ingeniera Estructural
[ f BB ] = ?
[ f BB1 ]1
Rgidos
[ f BB ]2
Rgidos
+
Figura 8. Representacin esquemtica para obtener [fBB].
Y'
Sistema
local
X'
( X B , YB )
YB Y A
XB XA
L
Sen i =
YB YA
L
Sistema
global
( X A , YA )
Cos i =
A
XB XA
Figura 9. Elementos de la matriz de transformacin para una barra en 2D.
cos i
[T ]i = sen i
0
sen i
cos i
0
0
0
1
[fBB]i = [T ]i [fBB]i [T]i
T
(16)
(17)
MATRIZ DE FLEXIBILIDAD DE UNA BARRA BIDIMENSIONAL DE SECCIN VARIABLE
Desde hace ya varios aos, Damy (1982), basndose en la teora clsica de vigas, aplic el mtodo de las
flexibilidades para la obtencin de los coeficientes de flexibilidad de elementos de seccin variable, Tena
(1997) hizo una presentacin completa del mtodo, una parte de sus resultados se muestran en la Figura 10
que contiene, adems, el significado de algunos trminos de la matriz de flexibilidad para elementos barra
bidimensionales. Las expresiones (18) a (22) permiten calcular esos trminos, por lo que la submatriz de
flexibilidades [f] queda expresada como:
XIV Congreso Nacional de Ingeniera Estructural
f33
f11
0
f32
f22
MZ
f23
Acapulco, Gro., 2004
Fx
0L
FY
0L
a) Fx = 1
L
1
c) Mz = 1
b) Fy = 1
Figura 10. Trminos de la matriz de flexibilidad de una barra bidimensional
f 11
[ f ]= 0
0
L
0
f 22
f 32
f 11 =
f 22 =
L
0
dx
EA( x )
( L x) 2 dx
+
EI z ( x )
f 23 =
L
0
f 33 =
f 23
f 33
(19)
L
0
dx
GAcy ( x )
( L x)dx
= f 32
EI z ( x )
L
0
(18)
dx
EI z ( x )
(20)
(21)
(22)
En las expresiones anteriores, como se sabe, E y G son, respectivamente, el mdulo de elasticidad y el de
rigidez a cortante del material; A(x), Iz(x) y Acy(x) son funciones que representan la variacin del rea,
momento de inercia y rea de cortante de la seccin transversal de la barra con respecto a su eje, una manera
de evaluar los trminos de la matriz [f] (ecuaciones 19 a 21), sobre todo cuando las propiedades geomtricas
de la barra son variables, es mediante integracin numrica (Monroy 2002).
Una vez obtenida [fBB], la inverza de esta submatriz resulta ser la submatriz de rigidez del extremo B de toda
la barra ([kBB]), una manera de completar la matriz de rigidez de toda la barra es utilizar a la matriz de
transporte de fuerzas (mencionada con anterioridad), para ello consideremos la barra en cuyos extremos A y B
se encuentran actuando las fuerzas indicadas en la Figura 11, por equilibrio tenemos que:
F x' = 0 ; Fx' A + Fx' B = 0
F y ' = 0 ; Fy ' A + Fy ' B = 0
M A = 0 ; LFy ' B + M A + M B = 0
Expresando las ecuaciones anteriores en forma matricial quedan de la siguiente manera.
Sociedad Mexicana de Ingeniera Estructural
Fy A
FyB
FxB
Fx A
MA
MB
L
0
Figura 11. Fuerzas actuando en los extremos de una barra en 3D
Fx ' A 1 0 0 Fx ' B
Fy ' A + 0 1 0 Fy ' B = 0
M 0 L 1 M
B
A
{FA} + [HBA] {FB} = 0
(23)
En la ecuacin anterior, [HBA] es la matriz de transporte de B a A. De manera similar, el equilibrio del nudo
B conduce a
(24)
[HBA] {FA} + {FB}= 0
Las fuerzas y los desplazamientos, ambos de los extremos de la barra, estn relacionados mediante
F ' k '
A' = AA
'
FB k BA
' '
d A
k AB
'
k BB d B'
desarrollando la ecuacin anterior y sustituyendo en la ecuacin 24 se tiene que:
0 = [ [kAA] + [HBA] [kBA] ] {dA} + [ [kAB] + [HBA] [kBB] ] {dB}
la igualdad anterior debe de ser vlida para cualquier {dA} y {dB} por lo que
[kAA] = [HBA] [kBA]
[kAB] = [HBA] [kBB]
(25)
(26)
sabemos que [kBA] = [kAB]T , por lo que, sustituyendo (26) en la ecuacin anterior y realizando la transpuesta
obtenemos
[kBA] = [kBB] [HBA]T
(27)
Observando las ecuaciones 25 a la 27 concluimos que nicamente se requieren [kBB] y [HBA] para obtener a
la matriz [k], el razonamiento anterior tambin es vlido para rigideces referidas al sistema global pero
utilizando la matriz de transporte definida por la ecuacin (4).
DESARROLLO DEL PROGRAMA
La aplicacin del procedimiento presentado en prrafos anteriores requiere, para fines prcticos, del uso de la
computadora, por lo que, como parte de este trabajo, y a partir del programa SECVAR5 (Monroy 2002) el
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
cual realiza la integracin numrica para la obtencin de los coeficientes de flexibilidad y momentos de
empotramiento de una barra de eje recto de seccin variable, se desarroll el programa BARSER2 que realiza
el transporte, al extremo de la barra, de las flexibilidades y desplazamientos (debidos a las fuerzas externas)
de cada segmento, para obtener la submatriz de flexibilidad total de la barra y a partir de esta las submatrices
[kBB], [kBA] y [kAA] as como las fuerzas en los extremos de la barra (reacciones) producidas por las fuerzas
externas. Para realizar lo anterior BARSER2 utiliza respectivamente las correspondientes matrices de
transporte de fuerzas y desplazamientos mostradas en prrafos anteriores, BARSER2 incluye la posibilidad
de manejar a la barra formada por una serie de segmentos no colineales (Figura 12) y para cada uno de ellos
con diferente forma de su seccin transversal, el programa BARSER2 acepta segmentos de seccin
transversal: I, T, rectangular, trapecial, circular, rectangular hueca, trapecial hueca y circular hueca
(Figura 13); con ancho y peralte constante o con variacin lineal o parablica entre sus extremos.
Y
segmentos no colineales
x
Z
h(x)
constante
parbola
lineal
Figura 12. Barra de seccin variable formada por una serie de segmentos no colineales.
Por cuestiones de espacio, el listado del programa BARSER2 no se incluy en este documento, sin embargo,
se puede solicitar en el Departamento de Estructuras de la DICTyG de la Facultad de Ingeniera de la UNAM
o a la direccin electrnica fmonroy@correo.unam.mx en donde tambin, apreciable lector, nos puede enviar
sus comentarios y sugerencias al respecto los cuales agradecemos anticipadamente.
Bs
Bs
ts
ts
ts
ts
Bs
Bi=0 ts=0 t=0
Bs
Bi
Bi
Bi=0
ts=0 t=0
t=0
Bs
ts
Bs
ts
ts
H
ts
Bi
Bs=0 Bi=0 ts=0 t=0
Bs=0 Bi=0 t=0
Bi=0
Figura 13. Formas para la seccin transversal de una barra de seccin variable, programa BARSER2.
10
Sociedad Mexicana de Ingeniera Estructural
EJEMPLOS
Tena (2002) hace una comparacin de los resultados presentados por Balkaya (2001) quien estudi, utilizando
elementos finitos, cmo afecta a los factores de rigidez y momentos de empotramiento el incremento de la
profundidad de acartelamiento en trabes simtricas de seccin T, con los obtenidos a partir de la teora de
Bernoulli-Euler para trabes acarteladas presentada por Tena-Colunga (1996), tambin presentan los resultados
del anlisis de un marco de una cruja con trabe acartelada de seccin T utilizando elementos finitos en 3D,
los cuales, como menciona Tena (2002) son muy valiosos para poder hacer comparaciones utilizando mtodos
que se basan en la teora clsica de vigas, mtodos energticos y/o el clculo de variaciones y, desde luego,
con el mtodo presentado en este trabajo.
Con lo anterior en mente, a continuacin se presentan una serie de ejemplos cuyos resultados, provenientes de
la aplicacin de la metodologa aqu presentada implementada en el programa BARSER2, se comparan con
los correspondientes proporcionados por otros autores.
EJEMPLO 1, MARCO CON BARRAS DE SECCIN VARIABLE
Se presenta el marco mostrado en la Figura 14 (Leontovich 1982), el anlisis estructural fue realizado con el
procedimiento propuesto en este trabajo, es decir se consider al marco como formado por una serie de cinco
segmentos de eje recto (dos de ellos no colineales) de seccin variable (Figura 15), tambin se utiliz al
programa SAP2000 y los resultados de ambas herramientas se muestran en la tabla 1 junto con los que
presenta la referencia antes citada.
2 k / pie
1: 4
840pies
3 pies
1259,98
pies
1:10
2099,98
pies
20 pies
ancho = 1.5 pies
Y
X
40
pies
199,86
10
2 pies
Figura 14. Geometra del marco del ejemplo 1 (Ejemplo 13-3 Leontovich 1982)
11
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
X
2
Figura 15. Nmero de segmentos de seccin variable para el ejemplo 1
Tabla 1. Algunos resultados del ejemplo 1.
Reacciones en el apoyo B
Horizontal (kip)
Vertical (kip)
Momento (kip-pie)
16.39
40
75.08
15.96
40
69.84
15.96
40
69.84
Herramienta
o procedimiento
Leontovich
Barras en Serie
SAP 2000 (barra)
Como puede verse los resultados proporcionados por SAP2000 (con elementos barra de seccin variable) y el
procedimiento de barras en serie son idnticos, no as con los presentados por Leontovich (1982), el autor
sospecha que la diferencia se puede deber al hecho de que en la referencia citada no se consideraron
deformaciones por fuerza axial ni por fuerza cortante (solo por flexin).
EJEMPLO 2, VIGA DE SECCIN VARIABLE DE EJE RECTO
Se aplica a la viga que se muestra en la Figura 16 el procedimiento de discretizarla en una serie de segmentos
rectos colineales de seccin variable.
10 Ton
Y
5 Ton
2 Ton/m
Z
50 cm
1 Ton/m
1 Ton/m
X
t=2.5 cm
M1z
h=0.8m
M2z
h=0.6m
h=1.2m
F1y
5m
5m
2.5 m
h=variable
lineal
F2y
Seccin transversal
E=20,390,000 Ton/m 2
=0.3
12
Sociedad Mexicana de Ingeniera Estructural
Figura 16. Barra de seccin transversal I de peralte variable (variacin lineal).
En la tabla 2 se muestran Los resultados proporcionados por BARSER2 y los obtenidos por Monroy (2003)
mediante los programas SECVAR5 y STAAD (en todos se incluy el efecto de la deformacin por cortante).
Los resultados obtenidos con las tres herramientas muestran que, para este ejemplo, prcticamente no existen
diferencias para las fuerzas y momentos de empotramiento.
Tabla 2. Fuerzas y momentos de empotramiento para el ejemplo 2.
Herramienta
o
procedimiento
Secvar5
BARSER2
Reacciones en el apoyo A
Horizontal
Vertical
Momento
(kip)
(kip)
(kip-pie)
23.59
103.75
23.58
103.60
STAAD
23.59
103.73
Reacciones en el apoyo B
Horizontal
Vertical
Momento
(kip)
(kip)
(kip-pie)
11.41
64.00
11.42
64.20
-
11.41
64.06
EJEMPLO 3, TRABE ACARTELADA SIMTRICA
Se presentan los resultados que se obtienen a partir de anlisis con elementos finitos elsticos bidimensionales
(utilizando SAP2000) para la familia de trabes acarteladas simtricas de seccin rectangular y variacin lineal
del acartelamiento, por lo que, en este ejemplo se utiliza la barra que se muestra en la Figura 17, se consideran
distintas profundidades de acartelamiento representado por el factor R, el cual establece el cociente existente
del peralte adicional en el extremo entre el peralte de la seccin media de la viga (Figura 17) y longitudes de
acartelamiento (en funcin del factor a, Figura 17). La profundidad de acartelamiento se vari de 0 a 2 con
incrementos de 0.25. Las longitudes relativas de acartelamiento consideradas fueron a = 0.1, a = 0.2, a =
0.3 y a = 0.4. Es de mencionar que se consider la componente de la deformacin debida a la fuerza cortante.
w = .764 Ton/m
10
H=.4m
RH
a0L
b=.25m
0
L = 50m
m=.2
E = 518,400.1 Ton/m2
Figura 17. Geometra de las trabes acarteladas simtricas de seccin rectangular
En las Figura 19 a, b, c y d se muestran, de manera grfica, los resultados obtenidos aplicando el programa
SAP2000 modelando a la barra con elementos finitos bidimensionales (Figura 18) con respecto a los que se
obtienen a partir de teora de Bernoulli-Euler para trabes acarteladas de eje recto (programa SECVAR5) as
como los proporcionados considerando el efecto de arco, es decir modelando a la barra como una serie de
segmentos de eje recto no colineales (programa BARSER2), las Figuras 19e y 19f muestran la diferencia en
porcentaje de los momentos de empotramiento ante carga uniformemente distribuida. En ellas se observa que:
13
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
Figura 18. Modelos de elementos finitos para el ejemplo 3 (programa SAP2000).
Momento de empotramiento a = .1
2.2
Momento de empotramiento, a = .2
2.2
2.1
2.1
2.0
EF 2D
1.9
Eje recto
1.8
Segmentos no
colineales
1.7
2.0
EF 2D
1.9
Eje recto
1.8
Segmentos no
colineales
1.7
1.6
Factor (R)
1.5
0
0.5
1.5
1.6
1.5
Factor (R)
0.5
1.5
b)
a)
Momento de empotramiento, a = .3
Momento de empotramiento, a = .4
2.2
2.1
EF 2D
2.0
Eje recto
1.9
Segmentos no
colineales
1.8
1.7
1.6
1.5
Factor (R)
0
0.5
1.5
2.2
2.1
2.0
1.9
EF 2D
Eje rect o
Segment os no
colineales
1.8
1.7
1.6
1.5
Factor (R)
0.5
c)
d)
Colineales vs EF2D (%)
No colineales vs EF2D (%)
25
25
20
20
15
15
10
10
1.5
a = .1, .2, .3 y .4
a = .1, .2, .3 y .4
e)
f)
Figura 19. Resultados obtenidos para el ejemplo 3
14
Sociedad Mexicana de Ingeniera Estructural
1.
Para valores de R mayores que la unidad, existe una diferencia notable entre el modelo de barra de
eje recto y los modelos de EF2D y de segmentos no colineales, los resultados de estos dos ltimos
coinciden satisfactoriamente.
2.
Los momentos de empotramiento se incrementan a medida que la longitud relativa de
acartelamiento (a) aumenta, por lo que en ese aspecto el procedimientos de segmentos no colineales
y el de EF2D coinciden, ese incremento se presenta hasta valores de a cercanos a .7 (o 1
aproximadamente) y descienden a medida que aumenta la profundidad de acartelamiento R, sin
embargo, bajo el modelado como viga de eje recto ese incremento continua.
3.
Por otra parte, se observa que los resultados presentados por el modelo de barra de eje recto con
respecto al de EF2D presenta diferencias de alrededor del 5% para R menor o igual a .75 y del 10%
al 15% para R menor o igual a 1.5.
EJEMPLO 4, MARCO DE UNA CRUJA CON TRABE ACARTELADA
Ahora se compararan los elementos mecnicos que presenta el marco de una cruja con trabe acartelada
simtrica mostrado en la Figura 20 (Balkaya, 2001), utilizando elementos finitos bidimensionales mediante el
programa SAP2000 (Figura 21), con los que se obtienen a partir de un anlisis plano modelando al marco
como una serie de segmentos no colineales de seccin variable mediante el programa BARSER2 y tambin
con los de la referencia antes citada (elementos finitos slidos, Balkaya 2001).
segmentos rgidos (nudo)
0.764 Ton/m
1.25
0
0.12
0.8
0
0.4
0.25
0
segmentos no colineales
eje de simetra
Unidades en m.
1.5
1.5
m= 0.2
2.5
1.5
0
1.0
0
0.5
0
Figura 20. Marco del ejemplo 4.
15
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
Figura 21. Modelo de elementos finitos bidimensionales (SAP2000).
Como apunta Tena (2002), independientemente del tipo de viga, existe cierta incertidumbre con respecto al
modelado de la conexin viga-columna, por lo que es difcil decidir qu proporcin de la unin viga-columna
debe considerarse como zona rgida para fines de anlisis. En este sentido, aunque poco prctico para el
anlisis de edificios, el modelado con elementos finitos tridimensionales (3DFEM) es ms apropiado. Por lo
anterior, en este ejemplo se utilizaron elementos finitos bidimensionales los cuales implican mucho menor
esfuerzo en las etapas de preproceso (preparacin del modelo) y postproceso (interpretacin de resultados)
para un usuario con las herramientas de anlisis comunes hoy en da. Para el modelado de la unin vigacolumna (nudo) se consideraron tres hiptesis diferentes sobre la rigidez de la unin viga-columna: 100%
efectiva (nudo rgido), 50% efectiva y 0% efectiva (nudo flexible).
Para el marco mostrado en la Figura 20, en la tabla 3 se muestran los elementos mecnicos calculados con las
diferentes herramientas, tambin se indican los calculados por Balkaya (elementos finitos slidos). Se observa
que la aproximacin del modelo de segmentos no colineales cuando se considera que la unin viga-columna
es 50% efectiva, con el modelo de elementos finitos (EF3D) es bastante aceptable ya que las diferencias son
menores al 8%, para este ejemplo el modelo propuesto por Balkaya (elemento de dos nodos de longitud
equvalente) alcanza diferencias de ms del 10% aproximadamente. Tambin se observa que los resultados del
modelo de EF2D son muy parecidos a los del modelo EF3D (las diferencias no rebasan el 6%
aproximadamente).
Tabla 3. Elementos mecnicos en la trabe acartelada y columnas
Modelo
Zona
rgida
en
el
nudo
Cara de la cartela
Elementos mecnicos en columnas
100%
Momento
(t-m)
1.220
1.337
1.404
Axial
(t)
0.914
0.864
0.916
Cortante
(t)
1.914
1.910
1.910
Centro del
claro
Momento
(t-m)
1.016
0.989
0.848
50%
1.253
0.858
1.910
1.008
1.301
0.858
2.101
0.844
0%
1.125
0.809
1.910
1.142
1.200
0.809
2.101
0.823
EF3D
EF2D
No
colineales
No
colineales
No
colineales
Elementos mecnicos en la viga
Cara superior de la columna
Base
Momento
(t-m)
1.372
1.298
1.422
Cortante
(t)
0.913
0.864
0.916
Axial
(t)
2.100
2.101
2.101
Momento
(t-m)
0.914
0.866
0.868
16
Sociedad Mexicana de Ingeniera Estructural
COMENTARIOS FINALES
Se present la aplicacin de las matrices de transporte como una opcin para la evaluacin de los elementos
de las matrices de rigidez elsticas bidimensionales as como de las fuerzas y momentos de empotramiento,
todos ellos, para barras de seccin transversal variable formadas por segmentos colineales y no colineales,
este procedimiento permite tomar en cuenta el acoplamiento fuerza axial-momento flexionante y considerar el
efecto de arco.
El artculo hace una comparacin de los resultados que se obtienen al modelar a las trabes acarteladas de
seccin I, rectangulares y T como vigas que cumplen con la teora de Bernoulli-Euler, con respecto a
soluciones obtenidas con elementos finitos utilizando herramientas de uso comn en la prctica.
Se compararon los elementos mecnicos de varias estructuras simples con trabe acartelada y columnas de
seccin variable sujetas a carga uniformemente distribuida principalmente (ellos fueron obtenidos mediante
un anlisis con elementos finitos planos), con respecto al que se obtiene modelando a todos los elementos
(colineales o no) conforme a la teora de Bernoulli-Euler. De la comparacin de los resultados obtenidos para
el marco de referencia, uno puede concluir que una alternativa para el modelado de trabes acarteladas que
forman parte de marcos es utilizar elementos de seccin variable no colineales.
Para aplicaciones prcticas, la implementacin de la metodologa propuesta condujo a la elaboracin del
programa de computadora VARSER2, con caractersticas de sencillez y flexibilidad, ya que le permite al
usuario la posibilidad de manejar barras constituidas por una serie de segmentos no colineales con diferentes
formas de su seccin transversal, especificando como datos las dimensiones caractersticas segn la forma de
la seccin, tambin es posible decidir si se incluir o no la deformacin por cortante as como indicar el
nmero de puntos a considerar en el proceso de integracin numrica y, adems, la posibilidad de considerar
el efecto de nudo rgido.
El programa VARSER2 se aplic a varios ejemplos (algunos de los cuales se incluyeron en este reporte), la
comparacin entre s de los resultados proporcionados por otras herramientas y textos relacionados con el
tema, result ser bastante satisfactoria. Las diferencias encontradas se deben (como anotan acertadamente
varios autores), al efecto de la deformacin por cortante dependiente de la relacin peralte claro y de la forma
de la seccin transversal de la barra, al efecto de arco y a la distribucin no lineal de esfuerzos producido por
ste en cierto tipo de secciones. Por lo anterior VARSER2 constituye una alternativa moderna para la
solucin de este tipo de problemas.
Por sencillez, el programa VARSER2 se desarroll en una versin de BASIC, pero con poco esfuerzo, todo o
una parte del mismo, puede ser traducido a otro lenguaje (si es necesario), y/o hacerle las modificaciones
convenientes para incorporarlo a algn programa de Anlisis Estructural, con lo que se tendr la posibilidad
de resolver estructuras con barras de seccin transversal variable formadas por segmentos no colineales como
una opcin ms dentro del mismo programa.
Finalmente, el autor considera que, el procedimiento analtico presentado result muy confiable para el
modelado elstico de barras con elementos de seccin variable no colineales, por lo que puede ser utilizado
para fines prcticos para estructuras similares a las aqu presentadas.
REFERENCIAS
Balkaya C. (2001), Behavior and modeling of nonprismatic members having T sections, ASCE Journal of
Structural Engineering, 127 (8), pp. 940-946.
Damy R. (1982), Notas de la clase Anlisis Estructural, Facultad de Ingeniera UNAM, Mxico.
17
XIV Congreso Nacional de Ingeniera Estructural
Acapulco, Gro., 2004
Damy R. (1984), Notas de la clase Aplicacin de las Computadoras al Anlisis Estructural y Teora General
de las Estructuras, Divisin de Estudios de Postgrado, Facultad de Ingeniera UNAM, Mxico.
El-Mezaini N., Balkaya C. y itipitioglu E. (1991), Analysis of frames with nonprismatic members, ASCE
Journal of Structural Engineering, 117 (6), pp. 1573-1592.
Handbook of Frame Constants, Beam Factors and Moment Coeficients for Members of Variable Section,
(1958), Portland Cement Association.
Just D. J. (1977), Plane frameworks of tapering box and I-section, ASCE Journal of Structural Engineering,
103 (1), pp. 71-86.
Monroy F. (2003), Aplicacin de la integracin numrica a la obtencin de la rigidez elstica de elementos
de seccin variable, Revista Ingeniera, Investigacin y Tecnologa, Facultad de Ingeniera UNAM,
Volumen IV, Nmero 1 enero-marzo de 2003.
QUICK-BASIC, versiones 2.0, 4.0 y 4.5 Microsoft Corp. 1984 a 1989.
Rajasekaran S. (1994), Equations for tapered thin-walled beams of generic open section, ASCE Journal of
Engineering Mechanics, 120 (8), pp. 1607-1629.
SAP 2000, Structural Analysis Program, versiones 7.40 y 8.28, Computers and Structures, Inc. Berkeley,
California U.S.A., 1996-2004.
STAAD, Structural Analysis and Design Program, versiones 22(III) y 2003(Pro) Research Engineers, Inc.
Yorba Linda CA, U.S.A., 1990-2000.
Tena-Colunga A. (1996), Stiffness formulation for nonprismatic beam elements, ASCE Journal of
Structural Engineering, 122 (12), pp. 1484-1489.
Tena A. (1997), Rigidez Elstica de elementos de seccin variable, Revista Ingeniera, Facultad de
Ingeniera UNAM, Volumen LXVI, Nmero 2 Abril-Junio de 1997.
Tena A. (2002), Modelado Elstico de Trabes acarteladas de Seccin T, XIII Congreso Nacional de
Ingeniera Estructural, Puebla, Pue., Mxico.
Tena-Colunga A. y Zaldo A. (1994), Formulacin Elstica de la Rigidez de Elementos de Seccin Variable,
IX Congreso Nacional de Ingeniera Estructural, Zacatecas, Zac., Mxico.
Valerian L. (1981), Prticos y Arcos, Soluciones Condensadas para el Anlisis Estructural, CECSA,
Mxico.
Yang Y-B. y Yau J-D. (1987), Stability of beams with tapered I-sections, ASCE Journal of Engineering
Mechanics, 113 (9), pp. 1337-1357.
18
Anda mungkin juga menyukai
- Glosario de FerrocarrilesDokumen27 halamanGlosario de FerrocarrilesDaniellhe Alejandro Charles ToroBelum ada peringkat
- Las Cartas de Tarot Son 78 y Se Dividen en Dos GruposDokumen3 halamanLas Cartas de Tarot Son 78 y Se Dividen en Dos GruposlisandroalvradoBelum ada peringkat
- MERCOSURDokumen95 halamanMERCOSURInés RomanoBelum ada peringkat
- Luminotecnia 133 Julio-Agosto 2016Dokumen69 halamanLuminotecnia 133 Julio-Agosto 2016etolockaBelum ada peringkat
- Historial Clínico InicialDokumen11 halamanHistorial Clínico InicialMARIA MAGDALENA MONDRAGON AGUILARBelum ada peringkat
- Informe FinalDokumen22 halamanInforme FinalRon MañaBelum ada peringkat
- MakroAhorro Food 12Dokumen17 halamanMakroAhorro Food 12Lucho ClaiBelum ada peringkat
- Cumbres de La Tierra - MedioambienteDokumen14 halamanCumbres de La Tierra - MedioambienteJOAQUIN DE JESUS YANA ORMACHEABelum ada peringkat
- CoB - SANGRE EN LAS CALLESDokumen20 halamanCoB - SANGRE EN LAS CALLESSergio Mesa MedinaBelum ada peringkat
- 09 - Arcillas y RX Sedimentarias PDFDokumen88 halaman09 - Arcillas y RX Sedimentarias PDFjohan velizBelum ada peringkat
- Unidad 5. Muestreo SistemáticoDokumen17 halamanUnidad 5. Muestreo SistemáticoSergio Miguel Polanco Santos100% (1)
- PARTE II ANÁLISIS DE CIRCUITOS DC REGLAS DE KIRCHHOFFDokumen16 halamanPARTE II ANÁLISIS DE CIRCUITOS DC REGLAS DE KIRCHHOFFGiovanny SuaBelum ada peringkat
- Lista de Precios Ferbras S.A. (Division PVC) HERRAJES - 02 de Abril de 2018Dokumen16 halamanLista de Precios Ferbras S.A. (Division PVC) HERRAJES - 02 de Abril de 2018Pedro Arroyo BelloBelum ada peringkat
- Fase 3 Monogafia de Matematica III INTEGRALES TRIPLESDokumen6 halamanFase 3 Monogafia de Matematica III INTEGRALES TRIPLESNicolas Alvitres GrundyBelum ada peringkat
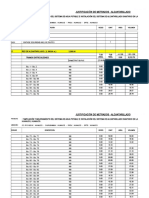
- Metrado D DesagueDokumen140 halamanMetrado D Desaguehxsey cryBelum ada peringkat
- Negocios InternacionalesDokumen234 halamanNegocios InternacionalesKaren Rios Paredes75% (4)
- 7.semiologia Recto y AnoDokumen7 halaman7.semiologia Recto y AnoMiguel Iglesias GomezBelum ada peringkat
- Para Enamorar A RuthDokumen13 halamanPara Enamorar A RuthAndenes CHILLITUPABelum ada peringkat
- Manual 7942 EspanolDokumen98 halamanManual 7942 EspanolSalvador Carbente CarbarinBelum ada peringkat
- Concepto Basico de CristalizacionDokumen2 halamanConcepto Basico de CristalizacionGabi ReyesmBelum ada peringkat
- Cuestionario Especializado Modulo Iv Anexo 2 Reservorio 2022Dokumen1 halamanCuestionario Especializado Modulo Iv Anexo 2 Reservorio 2022Luis condoriBelum ada peringkat
- Roca MetamorficasDokumen5 halamanRoca MetamorficasCésarRenatoCopacondoriCuaylaBelum ada peringkat
- EVEREST La Ruta Lógica Parte 2Dokumen35 halamanEVEREST La Ruta Lógica Parte 2Scott XrtBelum ada peringkat
- Control Prenatal Estudio de CasoDokumen22 halamanControl Prenatal Estudio de CasoElizabethPrietoBelum ada peringkat
- Recepción y Almacenamiento de Materia PrimaDokumen11 halamanRecepción y Almacenamiento de Materia PrimaalcidesBelum ada peringkat
- Material 5toDokumen60 halamanMaterial 5tofabrinoelguevaraBelum ada peringkat
- Depresión, Jóvenes y Pandemia Corte 2Dokumen21 halamanDepresión, Jóvenes y Pandemia Corte 2DIEGO VARGASBelum ada peringkat
- Etapas de La Revolucion IndustrialDokumen5 halamanEtapas de La Revolucion IndustrialDaniel Ricardo Garcia BaizBelum ada peringkat
- TrabajoDokumen6 halamanTrabajodanielchancusig4Belum ada peringkat
- Evidencia 1 QuimicaDokumen8 halamanEvidencia 1 QuimicaGerson Israel Resendiz MoralesBelum ada peringkat