Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Detecting Global Optimality and Extracting Solutions in GloptipolyDokumen18 halamanDetecting Global Optimality and Extracting Solutions in GloptipolydialauchennaBelum ada peringkat
- 0.2 KG 618.6 NM 3.5 NM 2.389 NSM 3.2 NSM 1:1:100 Rad/s 55.6 Rads 1g 1280 1280Dokumen1 halaman0.2 KG 618.6 NM 3.5 NM 2.389 NSM 3.2 NSM 1:1:100 Rad/s 55.6 Rads 1g 1280 1280dialauchennaBelum ada peringkat
- In Class Exercise 2: CSCI 510/EGGN 510 Image and Multidimensional Signal Processing Fall 2014Dokumen1 halamanIn Class Exercise 2: CSCI 510/EGGN 510 Image and Multidimensional Signal Processing Fall 2014dialauchennaBelum ada peringkat
- In Class Exercise 1: MATLAB Help. For Help On The Image Processing Toolbox, Look Under Image Processing Toolbox inDokumen1 halamanIn Class Exercise 1: MATLAB Help. For Help On The Image Processing Toolbox, Look Under Image Processing Toolbox indialauchennaBelum ada peringkat
- In Class Exercise 15: CSCI 510/EGGN 510 Image and Multidimensional Signal Processing Fall 2014Dokumen1 halamanIn Class Exercise 15: CSCI 510/EGGN 510 Image and Multidimensional Signal Processing Fall 2014dialauchennaBelum ada peringkat
- ACS321 Assignment (Worth 15% of The Overall Mark) : NotesDokumen1 halamanACS321 Assignment (Worth 15% of The Overall Mark) : NotesdialauchennaBelum ada peringkat
- Isma2012 0520Dokumen14 halamanIsma2012 0520dialauchennaBelum ada peringkat
- Laplace TransformDokumen47 halamanLaplace Transformdialauchenna100% (1)
- Journal of Mathematical Analysis and Applications: Xingjian Jing, Ziqiang Lang, Stephen A. BillingsDokumen13 halamanJournal of Mathematical Analysis and Applications: Xingjian Jing, Ziqiang Lang, Stephen A. BillingsdialauchennaBelum ada peringkat
- Medtronic Sees A High-Tech Solution To Global Health Woes - IEEE SpectrumDokumen2 halamanMedtronic Sees A High-Tech Solution To Global Health Woes - IEEE SpectrumdialauchennaBelum ada peringkat
- Laplace Transforms: N N N N N NDokumen7 halamanLaplace Transforms: N N N N N NdialauchennaBelum ada peringkat
- Recursive Least-Squares FIR Adaptive Filter - MATLAB AdaptfiltDokumen3 halamanRecursive Least-Squares FIR Adaptive Filter - MATLAB AdaptfiltdialauchennaBelum ada peringkat
- CSCI 512 - EENG 512 Computer VisionDokumen4 halamanCSCI 512 - EENG 512 Computer VisiondialauchennaBelum ada peringkat
- Ukspec Ceng CompetencesDokumen6 halamanUkspec Ceng CompetencesdialauchennaBelum ada peringkat
- Multiple Choice Quiz: (See Related Pages)Dokumen2 halamanMultiple Choice Quiz: (See Related Pages)dialauchennaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
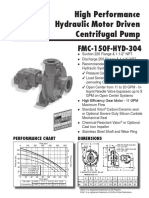
- FMC-150F-HYD-304 - 04-13 Bomba AceDokumen2 halamanFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesBelum ada peringkat
- Asl Ga55+90-02 9095 0504 76 PDFDokumen72 halamanAsl Ga55+90-02 9095 0504 76 PDFMushfiqur RahmanBelum ada peringkat
- Little Helper. Igantic Effect!: 150 VarioDokumen12 halamanLittle Helper. Igantic Effect!: 150 Variokgv_mailsBelum ada peringkat
- Industrial Attachment ReportDokumen20 halamanIndustrial Attachment ReportAlbert OjiamboBelum ada peringkat
- ) - (75 Meters) (M) - (9.8: 64 Solutions and Tests For Exploring Creation With PhysicsDokumen1 halaman) - (75 Meters) (M) - (9.8: 64 Solutions and Tests For Exploring Creation With Physicsgjw1684Belum ada peringkat
- Nissan 370Z: 3.7 PETROL Periodic MaintenanceDokumen3 halamanNissan 370Z: 3.7 PETROL Periodic MaintenanceMichael KaneBelum ada peringkat
- Suction Pile SpecDokumen33 halamanSuction Pile Specriaz16shaik100% (1)
- Intergraph Caesar Course ContentDokumen2 halamanIntergraph Caesar Course ContentValesh MonisBelum ada peringkat
- 3516B Valve Lash and Valve Brigde AdjustmentDokumen8 halaman3516B Valve Lash and Valve Brigde Adjustmentmanu luvungaBelum ada peringkat
- Eeguc Unit IDokumen28 halamanEeguc Unit IParventhan KannanBelum ada peringkat
- Grundfosliterature 6014937 PDFDokumen8 halamanGrundfosliterature 6014937 PDFIbrahima BABelum ada peringkat
- D2 Tool Steel - Heat Treatment Process PDFDokumen3 halamanD2 Tool Steel - Heat Treatment Process PDFGayathriRajasekaranBelum ada peringkat
- Type 1: Technical ParametersDokumen7 halamanType 1: Technical ParametersMuhammad AliBelum ada peringkat
- Oxygen Cylinder GuidanceDokumen1 halamanOxygen Cylinder GuidanceDarapu PrasanthiBelum ada peringkat
- 2008 Seadoo Shop ManualDokumen555 halaman2008 Seadoo Shop Manualanon_846090969100% (3)
- 303-05A+Accessory+DriveDokumen5 halaman303-05A+Accessory+DriveP HandokoBelum ada peringkat
- Depth of Water: A. Soil and Water Conservation EngineeringDokumen36 halamanDepth of Water: A. Soil and Water Conservation EngineeringJayvee Laureta100% (1)
- Statically Indeterminate BeamsDokumen7 halamanStatically Indeterminate BeamsMary Jane PelaezBelum ada peringkat
- RST 2010 CatalogDokumen90 halamanRST 2010 CatalogGoodBikesBelum ada peringkat
- Screws Self-DrillingDokumen22 halamanScrews Self-DrillingSamra DukićBelum ada peringkat
- CE 249 MidtemDokumen6 halamanCE 249 MidtemJepoy EliseoBelum ada peringkat
- Engineering Chemistry Unit 3 Notes RGPVDokumen14 halamanEngineering Chemistry Unit 3 Notes RGPVMufaddal HamidBelum ada peringkat
- Windlass Brake TestDokumen44 halamanWindlass Brake TestHasancan YavaşBelum ada peringkat
- 1-Fundamentals of Creep in MaterialsDokumen6 halaman1-Fundamentals of Creep in MaterialsLucianoBorasiBelum ada peringkat
- BEL - 6D Through Conduit GateDokumen2 halamanBEL - 6D Through Conduit Gateasoka.pwBelum ada peringkat
- BRH 625 Sandvi̇k BreakerDokumen87 halamanBRH 625 Sandvi̇k BreakerSerkanAl100% (1)
- R1 PDFDokumen15 halamanR1 PDFaliBelum ada peringkat
- PARKER TGK/THK MotorDokumen36 halamanPARKER TGK/THK MotorgugiBelum ada peringkat
- Belt Alignment ToolDokumen2 halamanBelt Alignment ToolAshutosh VishwakarmaBelum ada peringkat
- Scania CatalogDokumen68 halamanScania Catalogj_hernandez_ch80% (5)