Anda mungkin juga menyukai
- Especificaciones Powermaster Serie WB-A2-3P 15 PSIGDokumen1 halamanEspecificaciones Powermaster Serie WB-A2-3P 15 PSIGRodrigo Crevillen TinocoBelum ada peringkat
- (PI) UNE-EN - 13160-2 2016 - Comentarios E. Pajares PDFDokumen57 halaman(PI) UNE-EN - 13160-2 2016 - Comentarios E. Pajares PDFJOSE ALIRIO GARCIABelum ada peringkat
- Pra07 - Ejercicios de Sensores de Flujo y Presion PDFDokumen11 halamanPra07 - Ejercicios de Sensores de Flujo y Presion PDFDIEGO2Belum ada peringkat
- AutobusesDokumen1 halamanAutobusesSergio Sampayo BravoBelum ada peringkat
- 5 Funciones Varias Variables PDFDokumen9 halaman5 Funciones Varias Variables PDFALLAGE2Belum ada peringkat
- Hoja 4 CSDokumen11 halamanHoja 4 CSSergio Sampayo BravoBelum ada peringkat
- Hoja 2Dokumen3 halamanHoja 2Sergio Sampayo BravoBelum ada peringkat
- Hoja 1Dokumen2 halamanHoja 1Sergio Sampayo BravoBelum ada peringkat
- MatricesDokumen22 halamanMatricesSergio Sampayo BravoBelum ada peringkat
- Resume N Diagonal I Zac I OnDokumen7 halamanResume N Diagonal I Zac I OnSergio Sampayo BravoBelum ada peringkat
- Micro Examen InglesDokumen1 halamanMicro Examen InglesSergio Sampayo BravoBelum ada peringkat
- Tema 1 RedactadoDokumen9 halamanTema 1 RedactadoSergio Sampayo BravoBelum ada peringkat
- Análisis Geométrico en Una Máquina-HerramientaDokumen7 halamanAnálisis Geométrico en Una Máquina-HerramientaGabriel Borrero ABelum ada peringkat
- Catenaria PDFDokumen179 halamanCatenaria PDFJUAN PABLOBelum ada peringkat
- 1 La Importancia de La Administracion FinancieraDokumen30 halaman1 La Importancia de La Administracion FinancieraPablo Saavedra Saavedra100% (2)
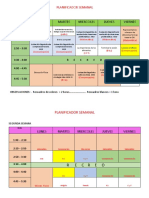
- 5 B. Planificador SemanalDokumen2 halaman5 B. Planificador SemanalJose Stalin Macalopu SerranoBelum ada peringkat
- Clima de La Región Norte o CibaoDokumen127 halamanClima de La Región Norte o CibaoJatnieris CabreraBelum ada peringkat
- Reporte Lem 3 EnchaquetadoDokumen8 halamanReporte Lem 3 EnchaquetadoAdanJimenezBelum ada peringkat
- EVAL. Leccion 5 Que Son Las Cargas ElectricasDokumen4 halamanEVAL. Leccion 5 Que Son Las Cargas ElectricasPilarBelum ada peringkat
- 09 - Medición de La LuzDokumen3 halaman09 - Medición de La LuzNena BunnyBelum ada peringkat
- La Evolucion de LAS Computadoras: PascalinaDokumen2 halamanLa Evolucion de LAS Computadoras: PascalinaRomina Ramos UrciaBelum ada peringkat
- Tema 6: Sistema Operativo Windows. Operaciones Con Directorios o CarpetasDokumen6 halamanTema 6: Sistema Operativo Windows. Operaciones Con Directorios o CarpetasJAVIER BORDONAU CARRASCOSABelum ada peringkat
- Servicios Auxiliares Mineros Practica N°2: Cálculos de EquiposDokumen8 halamanServicios Auxiliares Mineros Practica N°2: Cálculos de EquiposDeiber Esnaider Chumbe MirandaBelum ada peringkat
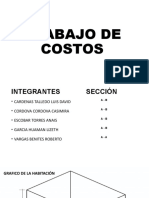
- Trabajo de CostosDokumen14 halamanTrabajo de CostosDavidBy MasterBelum ada peringkat
- Tarea 18 - (U2) - Lorea Valdez Alejandra Guadalupe - 1255Dokumen3 halamanTarea 18 - (U2) - Lorea Valdez Alejandra Guadalupe - 1255Alejandra Guadalupe Lorea ValdezBelum ada peringkat
- Ep3073pdir3 20111Dokumen4 halamanEp3073pdir3 20111Miguel Angel AlcántaraBelum ada peringkat
- Repaso Cepre SabadoDokumen3 halamanRepaso Cepre SabadoEdson Luis Egusquiza CordovaBelum ada peringkat
- Manual WaveDokumen129 halamanManual Waveguillote40Belum ada peringkat
- GUADAMUDDokumen12 halamanGUADAMUDyajairavera91Belum ada peringkat
- Generalidades Del Sistema Nervioso y Células ExcitablesDokumen167 halamanGeneralidades Del Sistema Nervioso y Células ExcitablesWATEfakBelum ada peringkat
- Anexo I.1 - Informes Investigacion Geofisica PDFDokumen155 halamanAnexo I.1 - Informes Investigacion Geofisica PDFFlavia Collacso TerrazasBelum ada peringkat
- Informe Tecnico Turbo Inventor Rhino CFD N 1Dokumen41 halamanInforme Tecnico Turbo Inventor Rhino CFD N 1EricEspinozaAcostaBelum ada peringkat
- Actividad 3 Procesos Industriales 2Dokumen11 halamanActividad 3 Procesos Industriales 2Juan reyBelum ada peringkat
- Acordes Primera y Segunda InversiónDokumen7 halamanAcordes Primera y Segunda Inversiónfernando90Belum ada peringkat
- Reporte de Consulta Sobre Los Temas: Modelo Corpuscular de La Materia, Modelo Atomicista y Modelo Esencialista.Dokumen7 halamanReporte de Consulta Sobre Los Temas: Modelo Corpuscular de La Materia, Modelo Atomicista y Modelo Esencialista.Alexis CG100% (1)
- HidrostáticaDokumen4 halamanHidrostáticaAbel Garcia GuillermoBelum ada peringkat
- Aprende A Dibujar Rostros y Manos Realistas - Parte 1Dokumen45 halamanAprende A Dibujar Rostros y Manos Realistas - Parte 1Santiago ChuquimiaBelum ada peringkat
- Informe Resistencia de Materiales EfDokumen31 halamanInforme Resistencia de Materiales EfAlex Manoli Hoyos CachayBelum ada peringkat