Anda mungkin juga menyukai
- Class RfPortDokumen3 halamanClass RfPortnassr_ismailBelum ada peringkat
- Network Capacity OverviewDokumen1 halamanNetwork Capacity Overviewnassr_ismailBelum ada peringkat
- 64 QAM FeatureDokumen9 halaman64 QAM Featurenassr_ismailBelum ada peringkat
- Uplink Pdtch-Pacch UsageDokumen1 halamanUplink Pdtch-Pacch Usagenassr_ismailBelum ada peringkat
- Location Tracking of Mobiles (Smart Filtering)Dokumen5 halamanLocation Tracking of Mobiles (Smart Filtering)nassr_ismailBelum ada peringkat
- 256 QAM FeatureDokumen7 halaman256 QAM Featurenassr_ismailBelum ada peringkat
- Adaptive PCC Anchoring ProcedureDokumen3 halamanAdaptive PCC Anchoring Procedurenassr_ismailBelum ada peringkat
- Iub Port Available Bandwidth Utilizing Ratio PDFDokumen2 halamanIub Port Available Bandwidth Utilizing Ratio PDFnassr_ismailBelum ada peringkat
- Dropctrlerrindseqerr ParameterDokumen2 halamanDropctrlerrindseqerr Parameternassr_ismailBelum ada peringkat
- HspaPlusSwitch FeaturesDokumen5 halamanHspaPlusSwitch Featuresnassr_ismailBelum ada peringkat
- Add Intra-Frequency Neighboring CellDokumen11 halamanAdd Intra-Frequency Neighboring Cellnassr_ismailBelum ada peringkat
- Important Parameters HuaweiDokumen5 halamanImportant Parameters Huaweinassr_ismailBelum ada peringkat
- Pa-Pb Power DistDokumen1 halamanPa-Pb Power Distnassr_ismailBelum ada peringkat
- UL RSSI EricssonDokumen15 halamanUL RSSI EricssonKemal Akbar60% (5)
- 2GDokumen71 halaman2GJimmy LauBelum ada peringkat
- ICSU SettingsDokumen19 halamanICSU Settingsnassr_ismailBelum ada peringkat
- Kalman EstimationDokumen28 halamanKalman EstimationKhoa Le TienBelum ada peringkat
- Nokia Consistency CheckDokumen1 halamanNokia Consistency Checknassr_ismailBelum ada peringkat
- Netact Tutorial PDFDokumen9 halamanNetact Tutorial PDFIevgen Volvach100% (2)
- Type1 Frame StructDokumen1 halamanType1 Frame Structnassr_ismailBelum ada peringkat
- DL Power AllocationDokumen1 halamanDL Power Allocationnassr_ismailBelum ada peringkat
- Power BoostingDokumen1 halamanPower Boostingnassr_ismailBelum ada peringkat
- CME Poster Feature OM Management PDFDokumen1 halamanCME Poster Feature OM Management PDFnassr_ismailBelum ada peringkat
- NSN - HW Parameter MappingDokumen9 halamanNSN - HW Parameter Mappingnassr_ismailBelum ada peringkat
- White Paper Understanding Mobile Terminated Call FailuresDokumen15 halamanWhite Paper Understanding Mobile Terminated Call FailuresSantosh KumarBelum ada peringkat
- Coordinate Systems and Transformations PDFDokumen13 halamanCoordinate Systems and Transformations PDFMirzaAriefFadzilahAhmadBelum ada peringkat
- Coordinate Systems and Transformations PDFDokumen13 halamanCoordinate Systems and Transformations PDFMirzaAriefFadzilahAhmadBelum ada peringkat
- Netact Tutorial PDFDokumen9 halamanNetact Tutorial PDFIevgen Volvach100% (2)
- Nokia LTE Alarms & Faults PDFDokumen5 halamanNokia LTE Alarms & Faults PDFnassr_ismail0% (1)
- IT Services 2017Dokumen2 halamanIT Services 2017nassr_ismailBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elements of Practical Aerodynamics - Bradley JonesDokumen456 halamanElements of Practical Aerodynamics - Bradley JonesJohn Kevin100% (4)
- Instrument Landing SystemDokumen16 halamanInstrument Landing SystemRana AsimBelum ada peringkat
- Competency DictionaryDokumen444 halamanCompetency DictionaryMichael AndersonBelum ada peringkat
- 2003 AllochrtDokumen1 halaman2003 Allochrtam1liBelum ada peringkat
- 1 Aircraft Navigation PDFDokumen3 halaman1 Aircraft Navigation PDFMuizzuddin Rosli0% (1)
- Eflu6050 Manual enDokumen16 halamanEflu6050 Manual enpablo martorell laraBelum ada peringkat
- Axial CompresserDokumen48 halamanAxial Compresservishnu kadiyalaBelum ada peringkat
- PMDG 747-400: Queen of The Skies IiDokumen113 halamanPMDG 747-400: Queen of The Skies IiRafrol RamonBelum ada peringkat
- Fundamentals of Gas Dynamics (NOC16 - ME05) Assignment - 8: SolutionsDokumen7 halamanFundamentals of Gas Dynamics (NOC16 - ME05) Assignment - 8: SolutionsSeenu CnuBelum ada peringkat
- Flying Scale Models July 2018Dokumen68 halamanFlying Scale Models July 2018Nikko Limua100% (1)
- Icao UsoapDokumen42 halamanIcao UsoapHari Adhikari100% (2)
- OMD-4 - Supplementary TrainingDokumen46 halamanOMD-4 - Supplementary TrainingSrawanBelum ada peringkat
- Calculating Minimum Pump Submersion to Avoid Vortex FormationDokumen3 halamanCalculating Minimum Pump Submersion to Avoid Vortex FormationIsaac Kendall0% (1)
- Pitot-Static Test Set: User Instruction ManualDokumen64 halamanPitot-Static Test Set: User Instruction ManualPeter McKevitzBelum ada peringkat
- Seaeye Panther-XT PlusDokumen6 halamanSeaeye Panther-XT PlusaremattBelum ada peringkat
- PDFDokumen3 halamanPDF6BisnagaBelum ada peringkat
- CathayDokumen17 halamanCathayShaurya RawatBelum ada peringkat
- Pushover Analysis SACSDokumen12 halamanPushover Analysis SACSIshwarya SrikanthBelum ada peringkat
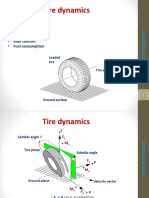
- Tire Dynamics: Tires AffectDokumen21 halamanTire Dynamics: Tires AffectAamir SohailBelum ada peringkat
- Air Traffic ControlDokumen12 halamanAir Traffic ControlDatta Mks100% (1)
- Mig 29 ManualDokumen30 halamanMig 29 ManualJose PatiñoBelum ada peringkat
- PDF C 172r QuestionDokumen11 halamanPDF C 172r QuestionSiddharth AroraBelum ada peringkat
- How To Measure LDO NoiseDokumen9 halamanHow To Measure LDO Noisesanjeevsoni64Belum ada peringkat
- DCS Guide to the Kamov Ka-50 Black Shark Attack HelicopterDokumen422 halamanDCS Guide to the Kamov Ka-50 Black Shark Attack HelicopterFernando CarmelBelum ada peringkat
- Automatic Tracking With Surveillance RadarsDokumen2 halamanAutomatic Tracking With Surveillance RadarsUzman MofeedBelum ada peringkat
- Guidelines For ATCO Common Core Content Initial Training - Part 3 - MOD 8 - TCLDokumen50 halamanGuidelines For ATCO Common Core Content Initial Training - Part 3 - MOD 8 - TCLjlferreiraBelum ada peringkat
- Aer Lingus PDFDokumen3 halamanAer Lingus PDFNg Wei JiangBelum ada peringkat
- Reading TestDokumen2 halamanReading TestTiara Nove RIABelum ada peringkat
- PIPER PA-34-220T "Seneca V" Checklist: Colorado Flight CenterDokumen16 halamanPIPER PA-34-220T "Seneca V" Checklist: Colorado Flight CenterCoreRtagBelum ada peringkat
- UAV Capabilities AnalysisDokumen103 halamanUAV Capabilities AnalysisAviation/Space History LibraryBelum ada peringkat