Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- On MIX DesignDokumen27 halamanOn MIX DesignGaurav naddaBelum ada peringkat
- Integral Bridge Design To EN 1992-2Dokumen58 halamanIntegral Bridge Design To EN 1992-2Dem HasiBelum ada peringkat
- Bhonga HouseDokumen9 halamanBhonga HousesweetloverzBelum ada peringkat
- Final Detiails T1111Dokumen7 halamanFinal Detiails T1111parammohaliBelum ada peringkat
- Baud GeneratorDokumen2 halamanBaud GeneratorparammohaliBelum ada peringkat
- VHDL Code For A Simple ALUDokumen4 halamanVHDL Code For A Simple ALUparammohali100% (1)
- UARTDokumen8 halamanUARTparammohaliBelum ada peringkat
- Ds ChecklistDokumen2 halamanDs ChecklistG-SamBelum ada peringkat
- WLW Y9 Information Booklet 2019Dokumen6 halamanWLW Y9 Information Booklet 2019isleworthsyonBelum ada peringkat
- CD 354 Revision 1 Design of Minor Structures-WebDokumen64 halamanCD 354 Revision 1 Design of Minor Structures-Webgaurav sharmaBelum ada peringkat
- Inspiron 15r Se 7520 Owner's Manual UsDokumen84 halamanInspiron 15r Se 7520 Owner's Manual UsABelum ada peringkat
- Yasir Hayat Geo Engineer CVDokumen5 halamanYasir Hayat Geo Engineer CVYasir HayatBelum ada peringkat
- Manpower RequirementsDokumen12 halamanManpower Requirementslinga2014Belum ada peringkat
- Admin GuideDokumen532 halamanAdmin GuideukaburBelum ada peringkat
- Cell Algorithm SwitchDokumen12 halamanCell Algorithm Switchsandy_arisandy100% (2)
- Install and service instructions for Themaclassic combination and system boilersDokumen60 halamanInstall and service instructions for Themaclassic combination and system boilersbettyanghelBelum ada peringkat
- W78C32Dokumen14 halamanW78C32Hamter YoBelum ada peringkat
- Accedian Networks MetroNODE 10GE 2pg - FINAL - 083112Dokumen2 halamanAccedian Networks MetroNODE 10GE 2pg - FINAL - 083112Cory HaesslerBelum ada peringkat
- Introduction To Xamarin FormDokumen37 halamanIntroduction To Xamarin FormKurniaBelum ada peringkat
- Icon Library: Current As of June 8, 2011Dokumen36 halamanIcon Library: Current As of June 8, 2011putakoBelum ada peringkat
- Marina Bay Sands SingaporeDokumen4 halamanMarina Bay Sands SingaporeFitriBelum ada peringkat
- How To Bridge Private Two LANDokumen41 halamanHow To Bridge Private Two LANst3liosBelum ada peringkat
- Lesson 7: The Eras of Art and Music: ObjectivesDokumen8 halamanLesson 7: The Eras of Art and Music: ObjectivesAsteria TimeBelum ada peringkat
- Tletvl Technical Drafting Specialization Las Week5 & 6Dokumen10 halamanTletvl Technical Drafting Specialization Las Week5 & 6Nixon AtienzaBelum ada peringkat
- Viewguide 1Dokumen2 halamanViewguide 1api-424173654Belum ada peringkat
- Samsung Galaxy smartphones supporting Knox modelsDokumen15 halamanSamsung Galaxy smartphones supporting Knox modelsRai SaputraBelum ada peringkat
- Structural/non structural fixings in concreteDokumen20 halamanStructural/non structural fixings in concreteabhishek yadavBelum ada peringkat
- Cấu hình Open SWanDokumen11 halamanCấu hình Open SWanCucku TieotuBelum ada peringkat
- BRKRST-3114 The Art of Network ArchitectureDokumen60 halamanBRKRST-3114 The Art of Network ArchitectureTimucin DIKMEN100% (1)
- STI Firestop BrochureDokumen16 halamanSTI Firestop BrochureconchunchunBelum ada peringkat
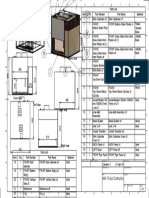
- AAA - Product Construction Drawing v1Dokumen1 halamanAAA - Product Construction Drawing v1alexBelum ada peringkat
- CIT 215 Intro To Programming Languages - 1 PDFDokumen196 halamanCIT 215 Intro To Programming Languages - 1 PDFjustin onagaBelum ada peringkat
- Session LogDokumen532 halamanSession LogGhsoted SmoneoneBelum ada peringkat
- A4000 Installation ManualDokumen10 halamanA4000 Installation ManualMuti FutiBelum ada peringkat