Anda mungkin juga menyukai
- Machine Vibration (A Beginners Guide)Dokumen151 halamanMachine Vibration (A Beginners Guide)mavric44493% (30)
- SKF - Tech Associates of CharlotteDokumen57 halamanSKF - Tech Associates of Charlotteiatorres100% (4)
- Using Time Waveform Analysis To Distinguish Looseness From MisalignmentDokumen5 halamanUsing Time Waveform Analysis To Distinguish Looseness From MisalignmentManel Montesinos100% (1)
- PeakVue TrainingDokumen98 halamanPeakVue TrainingThyagaraju Palisetty100% (5)
- ISO 18436 Category IV Vibration Analyst Training TopicsDokumen1 halamanISO 18436 Category IV Vibration Analyst Training TopicsDean LofallBelum ada peringkat
- Vibration Analysis - Center of Electrical MachinesDokumen12 halamanVibration Analysis - Center of Electrical MachinesmortezaBelum ada peringkat
- 05-Fault Analysis 4Dokumen17 halaman05-Fault Analysis 4Hatem Abdelrahman100% (1)
- Lead Screw SelectionDokumen21 halamanLead Screw Selectionaushad3mBelum ada peringkat
- Case Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerDari EverandCase Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Machinery Diagnostic PlotsDokumen16 halamanMachinery Diagnostic Plotsfazzlie100% (1)
- SDT Lubrication ULTRASONIDO INGLES PDFDokumen14 halamanSDT Lubrication ULTRASONIDO INGLES PDFALONSO SOLÍSBelum ada peringkat
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDari EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisPenilaian: 4 dari 5 bintang4/5 (2)
- Vibration ChartDokumen1 halamanVibration Chartairframer1981Belum ada peringkat
- VIBS Modal Overview 021703 MACLDokumen55 halamanVIBS Modal Overview 021703 MACLBakkiya RajBelum ada peringkat
- Tunisia Bently Presentation DayDokumen208 halamanTunisia Bently Presentation DayHamdi Mohamed100% (1)
- Vibration Adv 0402Dokumen433 halamanVibration Adv 0402Sajid Rafique100% (7)
- Proven Method For Specifying Both Six Spectral Alarm Bands As Well As Narrowband Alarm EnvelopesDokumen4 halamanProven Method For Specifying Both Six Spectral Alarm Bands As Well As Narrowband Alarm EnvelopesVILLANUEVA_DANIEL2064Belum ada peringkat
- Design of Shafts and KeysDokumen106 halamanDesign of Shafts and KeysLoay MohammedBelum ada peringkat
- Training Course IIIDokumen188 halamanTraining Course IIIHosam Abd Elkhalek100% (2)
- Dynamic Calculation of Cement Mill FoundationDokumen1 halamanDynamic Calculation of Cement Mill FoundationHosam Abd ElkhalekBelum ada peringkat
- Chapter 10Dokumen63 halamanChapter 10Hosam Abd Elkhalek100% (1)
- Chapter 10Dokumen63 halamanChapter 10Hosam Abd Elkhalek100% (1)
- Bypass Screw Conveyor Drive:: MotorDokumen2 halamanBypass Screw Conveyor Drive:: MotorHosam Abd ElkhalekBelum ada peringkat
- Vibration Assessment QuizDokumen2 halamanVibration Assessment QuizJose Luis RattiaBelum ada peringkat
- Electric Motor Diagnostics Defect Frequencies and Data ColleDokumen51 halamanElectric Motor Diagnostics Defect Frequencies and Data ColleSubrata Dubey50% (2)
- Raw Mill Drive Line IIDokumen5 halamanRaw Mill Drive Line IIHosam Abd ElkhalekBelum ada peringkat
- Bearing Vibration Analysis in Labview PDFDokumen11 halamanBearing Vibration Analysis in Labview PDFAli ShanBelum ada peringkat
- Machinery Malfunction Diagnosis and Correction - Constant ContactDokumen2 halamanMachinery Malfunction Diagnosis and Correction - Constant ContactLisan YanBelum ada peringkat
- RBMWizardDokumen286 halamanRBMWizardJesus EspinozaBelum ada peringkat
- Balancing Without Phase ReadingDokumen2 halamanBalancing Without Phase Readingvirtual_56Belum ada peringkat
- Autocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookDokumen8 halamanAutocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookLe Thanh Hai100% (2)
- Vibration Analysis of Gear Box.5-MilosprokoDokumen3 halamanVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- Creating PeakVue Measurement PointsDokumen2 halamanCreating PeakVue Measurement PointsNewman RiosBelum ada peringkat
- Critical Speed of ShaftsDokumen6 halamanCritical Speed of ShaftssachmayaBelum ada peringkat
- Phase Analysis: Part 1Dokumen27 halamanPhase Analysis: Part 1Shawn RuhlBelum ada peringkat
- Bumptest 180410120817Dokumen13 halamanBumptest 180410120817Daniel SolaresBelum ada peringkat
- 2130 PPT PeakVueCaseDokumen98 halaman2130 PPT PeakVueCasesebastian100% (1)
- Vibration Field Guide (For the Newbie Vibration Analyst)Dari EverandVibration Field Guide (For the Newbie Vibration Analyst)Belum ada peringkat
- Introduction To PeakvueDokumen55 halamanIntroduction To PeakvuesebastianBelum ada peringkat
- ORBIT AnalysisDokumen4 halamanORBIT AnalysisManoj PaneriBelum ada peringkat
- Order Analysis ToolkitDokumen16 halamanOrder Analysis ToolkitManuel Enrique Salas FernándezBelum ada peringkat
- ISO 18436 Category IVDokumen2 halamanISO 18436 Category IVzona amrullohBelum ada peringkat
- CGL02 Blowers Report May 2009Dokumen9 halamanCGL02 Blowers Report May 2009Hosam Abd Elkhalek100% (1)
- CGL02 Blowers Report May 2009Dokumen9 halamanCGL02 Blowers Report May 2009Hosam Abd Elkhalek100% (1)
- Training Cat III Practice Exam Asset Optimization en 39842Dokumen3 halamanTraining Cat III Practice Exam Asset Optimization en 39842Mohammadreza Galeban100% (1)
- Vibration IntermediateDokumen512 halamanVibration IntermediateSajid Rafique100% (6)
- Centrifugal Fans Using Vibration Analysis To Detect ProblemsDokumen3 halamanCentrifugal Fans Using Vibration Analysis To Detect ProblemsGivon Da Anneista100% (1)
- AMPLITUDE MODULATION Versus BEATSDokumen5 halamanAMPLITUDE MODULATION Versus BEATSHaitham YoussefBelum ada peringkat
- Rotating Shaft Whirling of ShaftDokumen8 halamanRotating Shaft Whirling of ShaftGinu Thomas100% (1)
- Vibration NotesDokumen95 halamanVibration NotesHaitham Youssef100% (1)
- 3-Single Degree Free VibrationDokumen124 halaman3-Single Degree Free VibrationsolomonrajarBelum ada peringkat
- Basics of VibrationDokumen6 halamanBasics of VibrationChetan PrajapatiBelum ada peringkat
- Basics of Turbomachinery BalanceDokumen14 halamanBasics of Turbomachinery BalanceSuthan RBelum ada peringkat
- Bently Book Chapter 4 Timebase Plots1Dokumen18 halamanBently Book Chapter 4 Timebase Plots1Manuel L LombarderoBelum ada peringkat
- Orbit and Timebase PlotsDokumen16 halamanOrbit and Timebase PlotsAnonymous w6TIxI0G8l100% (1)
- Bump TestDokumen5 halamanBump Testwsjouri2510Belum ada peringkat
- Low Freq. Meas & gSEDokumen13 halamanLow Freq. Meas & gSEsatya_chagantiBelum ada peringkat
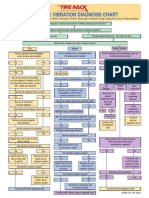
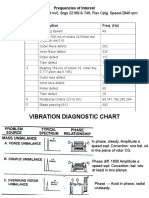
- Vibration Diagnostic Chart1Dokumen16 halamanVibration Diagnostic Chart1Anand KumarBelum ada peringkat
- App Note Shaft Crack BNCDokumen9 halamanApp Note Shaft Crack BNCLuisBelum ada peringkat
- EM 67 - Recommended Practices For A Bump TestDokumen4 halamanEM 67 - Recommended Practices For A Bump TestChad Hunt100% (2)
- 11 PeakVue OverviewDokumen38 halaman11 PeakVue OverviewAhmad Syahroni100% (1)
- ISO 18436 Category IV Vibration Analyst TrainingDokumen4 halamanISO 18436 Category IV Vibration Analyst TrainingDean Lofall50% (2)
- Monitoring Gear Boxes With Peakvue: Presentation at Niagara Falls Vibration Institute Chapter January 20, 2005Dokumen60 halamanMonitoring Gear Boxes With Peakvue: Presentation at Niagara Falls Vibration Institute Chapter January 20, 2005eko bagus sunaryo100% (2)
- Detect Machinery Faults by Using Peak VueDokumen13 halamanDetect Machinery Faults by Using Peak VueHarold Alconz100% (2)
- VibrationDokumen8 halamanVibrationAnuj Gautam100% (1)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentDari EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- VibMatters Current IssueDokumen19 halamanVibMatters Current IssueUsman JabbarBelum ada peringkat
- Detection of Ski Slopes in Vibration SpectrumsDokumen7 halamanDetection of Ski Slopes in Vibration SpectrumsjeyaselvanmBelum ada peringkat
- Envelope BearingDokumen14 halamanEnvelope BearingHussein Razaq100% (1)
- Vibration Analysis Gt6 Generator LibyaDokumen6 halamanVibration Analysis Gt6 Generator LibyaRohit GunerkarBelum ada peringkat
- Dual Channel Phase - Crest Factor-Cascade-Run Up - LORDokumen5 halamanDual Channel Phase - Crest Factor-Cascade-Run Up - LORMohd Asiren Mohd SharifBelum ada peringkat
- Case History EnvelopingDokumen40 halamanCase History EnvelopingHosam Abd ElkhalekBelum ada peringkat
- Gearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsDokumen18 halamanGearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsRICARDO OLIVEROBelum ada peringkat
- Paul Bradley Thesis 2012Dokumen383 halamanPaul Bradley Thesis 2012AlhumaidBelum ada peringkat
- Predict-Mobius Training BrochureDokumen7 halamanPredict-Mobius Training BrochurefaisalBelum ada peringkat
- A Bridge RuleDokumen120 halamanA Bridge RulemanishBelum ada peringkat
- Mechanical Vibrations and Condition MonitoringDari EverandMechanical Vibrations and Condition MonitoringPenilaian: 5 dari 5 bintang5/5 (1)
- 1515 - Cement Mill Natural ModesDokumen1 halaman1515 - Cement Mill Natural ModesHosam Abd ElkhalekBelum ada peringkat
- CourseDokumen35 halamanCourseHosam Abd ElkhalekBelum ada peringkat
- 2 - LEADER - Understanding Journal Bearings PDFDokumen26 halaman2 - LEADER - Understanding Journal Bearings PDFpandunugraha04Belum ada peringkat
- Basic Machinery Vibrations PDFDokumen164 halamanBasic Machinery Vibrations PDFHosam Abd Elkhalek100% (4)
- Flow Sheet Line IDokumen28 halamanFlow Sheet Line IHosam Abd ElkhalekBelum ada peringkat
- All Quiet On The Western Front ExcerptDokumen2 halamanAll Quiet On The Western Front ExcerptHosam Abd Elkhalek100% (3)
- CementDokumen44 halamanCementPawan SinghBelum ada peringkat
- Reba ViDokumen13 halamanReba ViJaques ValleBelum ada peringkat
- Frequencies CPU-38 - 16003727Dokumen1 halamanFrequencies CPU-38 - 16003727Hosam Abd ElkhalekBelum ada peringkat
- All Quiet On The Western Front ExcerptDokumen2 halamanAll Quiet On The Western Front ExcerptHosam Abd Elkhalek100% (3)
- 8 Critical Speeds of Shafts PDFDokumen9 halaman8 Critical Speeds of Shafts PDFMohammed Safuvan Kazhungil100% (1)
- B1 Critical Speed of ShaftDokumen13 halamanB1 Critical Speed of ShaftAkash BargeBelum ada peringkat
- Presentation of Water RotorDokumen11 halamanPresentation of Water RotorMUHAMMAD SARFARAZ0% (1)
- Vibration Engg. LabDokumen14 halamanVibration Engg. LabHardial SinghBelum ada peringkat
- Dynamics Lab QuizDokumen4 halamanDynamics Lab QuizSudhananda MallickBelum ada peringkat
- Recent Technical Trends in Ball ScrewsDokumen12 halamanRecent Technical Trends in Ball ScrewsjoseingtecindBelum ada peringkat
- Rotating Steel ShaftsDokumen3 halamanRotating Steel ShaftsSrini KumarBelum ada peringkat
- Jurnal WIRAWAN PDFDokumen9 halamanJurnal WIRAWAN PDFFirdaus Darul Ikhsan 2007125639Belum ada peringkat
- FireWater PumpDokumen22 halamanFireWater PumpAshwin BlasterBelum ada peringkat
- Machine DesignDokumen53 halamanMachine DesignSeylik YapmaBelum ada peringkat
- Ijsetr Vol 3 Issue 8 2091 2094 PDFDokumen4 halamanIjsetr Vol 3 Issue 8 2091 2094 PDFfariskolej4946Belum ada peringkat
- Exp-2 TomDokumen3 halamanExp-2 TomMail BotBelum ada peringkat
- Design of Shafts: ME 423: Machine Design Instructor: Ramesh SinghDokumen31 halamanDesign of Shafts: ME 423: Machine Design Instructor: Ramesh SinghVijayaBelum ada peringkat
- Experiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)Dokumen5 halamanExperiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)wawagulsBelum ada peringkat
- Addax Catalog - 2022Dokumen12 halamanAddax Catalog - 2022kylegazeBelum ada peringkat
- Response of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleDokumen7 halamanResponse of A Continuous Guideway On Equally Spaced Supports Traversed by A Moving VehicleanirbanBelum ada peringkat
- 04-Pres Basic BalancingDokumen11 halaman04-Pres Basic BalancinghuliplayBelum ada peringkat
- DOM ProblemsSolvedinClassDokumen129 halamanDOM ProblemsSolvedinClassrukmini_ramkiBelum ada peringkat
- EXP:2 Date: 20-08-2021 Determination of Critical Speed of Whirling Shafts AimDokumen5 halamanEXP:2 Date: 20-08-2021 Determination of Critical Speed of Whirling Shafts AimAnantha ReddyBelum ada peringkat
- Whirling of Shaft SMM 3 by NITK SurathkalDokumen20 halamanWhirling of Shaft SMM 3 by NITK SurathkalMarilyn PetersBelum ada peringkat
- Jit Qb-Dom - Blooms TaxonomyDokumen39 halamanJit Qb-Dom - Blooms TaxonomyBalu phoenixBelum ada peringkat
- Whirling of ShaftDokumen7 halamanWhirling of Shaftadityaguptaa100% (1)