Anda mungkin juga menyukai
- Radioarte PDFDokumen53 halamanRadioarte PDFMarosaMorosaBelum ada peringkat
- Frases Prehechas Boletas de La SEPDokumen2 halamanFrases Prehechas Boletas de La SEPRo MaldonadoBelum ada peringkat
- Seminario 1 - Incremento de Esfuerzos Debido A Diferentes Tipos de CargaDokumen14 halamanSeminario 1 - Incremento de Esfuerzos Debido A Diferentes Tipos de CargaRoger TuestaBelum ada peringkat
- KSDokumen3 halamanKSOrio TilleriaBelum ada peringkat
- Calculos Del MotorDokumen15 halamanCalculos Del MotorWalter Coronel100% (1)
- NTP Iso 4427 1 PDFDokumen22 halamanNTP Iso 4427 1 PDFnais311Belum ada peringkat
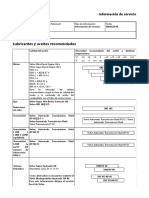
- Lubricantes Volvo L70FDokumen2 halamanLubricantes Volvo L70FDiego Gonzalez BuendiaBelum ada peringkat
- Estudio TopograficoDokumen3 halamanEstudio TopograficoAngel Vidal Dimaria Peralta Ricra0% (1)
- Analisis de Costos UnitariosDokumen14 halamanAnalisis de Costos UnitariosCynthiaClementeVilcaBelum ada peringkat
- Informe GiraDokumen19 halamanInforme GiraAlex MirandaBelum ada peringkat
- 17.1.1 Matriz 5W1HDokumen6 halaman17.1.1 Matriz 5W1HLuis Felipe U. RodríguezBelum ada peringkat
- Sistema de PosicionamientoDokumen160 halamanSistema de PosicionamientoRamón Rodriguez HerreraBelum ada peringkat
- CurpDokumen1 halamanCurpSebastian GarbalenaBelum ada peringkat
- ProcedimientosDokumen2 halamanProcedimientosroberto martinezBelum ada peringkat
- Experimento de Metabolismo VegetalDokumen2 halamanExperimento de Metabolismo VegetalLiyiPaternina100% (1)
- Sensores Actuadores IOTDokumen16 halamanSensores Actuadores IOTsomwuanBelum ada peringkat
- Ruta de Aprendizaje U1-1ergrado-Comu-S8 PDFDokumen9 halamanRuta de Aprendizaje U1-1ergrado-Comu-S8 PDFJorge LopezBelum ada peringkat
- Criterios de EstabilidadDokumen6 halamanCriterios de Estabilidadfabian111213Belum ada peringkat
- Trabajo Final de Toma de Decisiones Grupo 2Dokumen12 halamanTrabajo Final de Toma de Decisiones Grupo 2janezita100% (1)
- Usando El ResonadorDokumen22 halamanUsando El Resonadorinxs_the_bestBelum ada peringkat
- Catalogo Mecalux PDFDokumen40 halamanCatalogo Mecalux PDFJhamill Linares TejedaBelum ada peringkat
- Principios Accion PreventivaDokumen2 halamanPrincipios Accion PreventivaViti YoungBelum ada peringkat
- Análisis de Precios Unitarios: PartidaDokumen38 halamanAnálisis de Precios Unitarios: PartidaDAMBERS DAVIS CHAPILLIQUENBelum ada peringkat
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Aclarar Térninos y Conceptos Del CursoDokumen10 halamanGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Aclarar Térninos y Conceptos Del Cursoluis eduardo charryBelum ada peringkat
- Actas de Observaciones de Recepcion de Obra La Union Leticia Saneamiento ChiclayoDokumen3 halamanActas de Observaciones de Recepcion de Obra La Union Leticia Saneamiento Chiclayonilton cerronBelum ada peringkat
- Surichaqui LinealDokumen21 halamanSurichaqui LinealLeonardo ManuelBelum ada peringkat
- Modulo de Comunicacion en EnfermeriaDokumen50 halamanModulo de Comunicacion en EnfermeriaEstela HopfBelum ada peringkat
- Guia Nº1 Ejercicios Mecanica de FluidosDokumen1 halamanGuia Nº1 Ejercicios Mecanica de FluidosA01312078Belum ada peringkat
- Guía de Ejercicios Elasticidad 2010Dokumen4 halamanGuía de Ejercicios Elasticidad 2010Rocio Becerra CastilloBelum ada peringkat