Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- General CatalogueDokumen19 halamanGeneral Cataloguedbristow21Belum ada peringkat
- What Is MEMS TechnologyDokumen6 halamanWhat Is MEMS TechnologyMAHDILEE100% (2)
- Greenlane Biogas Cover Page See Content On Following Page (S)Dokumen3 halamanGreenlane Biogas Cover Page See Content On Following Page (S)Cibele AlvesBelum ada peringkat
- Seminar On: Underwater WeldingDokumen30 halamanSeminar On: Underwater WeldingGAJENDRA KUMARBelum ada peringkat
- Steinmetz CP - On The Law of Hysteresis Part 3Dokumen47 halamanSteinmetz CP - On The Law of Hysteresis Part 3Rahul GaurBelum ada peringkat
- Principles of Motion EconomyDokumen39 halamanPrinciples of Motion EconomyNikhil GargBelum ada peringkat
- 224 Core Data Best Practices PDFDokumen198 halaman224 Core Data Best Practices PDFHoang TranBelum ada peringkat
- Week 1: Directing and Managing Project ExecutionDokumen10 halamanWeek 1: Directing and Managing Project ExecutionAnonymous 4eQB3WZBelum ada peringkat
- Fendolite Proofing PDFDokumen4 halamanFendolite Proofing PDFShaji MathewBelum ada peringkat
- 390 Illustrated Parts CatalogDokumen145 halaman390 Illustrated Parts CatalogEricson ViaBelum ada peringkat
- Akhila ResumeDokumen2 halamanAkhila ResumejeelaniBelum ada peringkat
- TB 10301-2009 Technical Spicification For Basic Operation Safety of Railway EngineeringDokumen133 halamanTB 10301-2009 Technical Spicification For Basic Operation Safety of Railway EngineeringHENDROBelum ada peringkat
- KeiretsuDokumen17 halamanKeiretsuHimanshu KumarBelum ada peringkat
- Rube GoldbergDokumen20 halamanRube Goldbergapi-297309213Belum ada peringkat
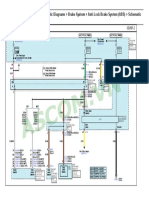
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDokumen1 halaman2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsHuy Trần QuốcBelum ada peringkat
- Startup ShutdownDokumen4 halamanStartup ShutdownPit_mkluBelum ada peringkat
- DPM Class-NotesDokumen38 halamanDPM Class-NotesZephaniah MuneneBelum ada peringkat
- "Campus Placement" Has Been Always A Dream For Me in GraduationDokumen3 halaman"Campus Placement" Has Been Always A Dream For Me in GraduationvivekBelum ada peringkat
- Software Engineering I (02161) Lecture Notes: Assoc. Prof. Hubert Baumeister Spring 2012Dokumen16 halamanSoftware Engineering I (02161) Lecture Notes: Assoc. Prof. Hubert Baumeister Spring 2012Karthik KeyanBelum ada peringkat
- Oracle Enterprise Manager Cloud Control 12c Cloud MGMT Workshop - D77277GC10 - 1080544 - USDokumen4 halamanOracle Enterprise Manager Cloud Control 12c Cloud MGMT Workshop - D77277GC10 - 1080544 - USJinendraabhiBelum ada peringkat
- Handling Tickets Is Called Issue Tracking System.: Sap SDDokumen6 halamanHandling Tickets Is Called Issue Tracking System.: Sap SDNaveen KumarBelum ada peringkat
- RC Square Pile Brochure 2022Dokumen8 halamanRC Square Pile Brochure 2022k33_hon87Belum ada peringkat
- Fabric Conveyor Belts Installation and Maintenance Guide: Habasit - Solutions in MotionDokumen16 halamanFabric Conveyor Belts Installation and Maintenance Guide: Habasit - Solutions in MotionAbdul Kani Ahamed MBelum ada peringkat
- Yoshimura Rs3 Slip On Exhaust Honda Cbr600 f4 I20012006Dokumen4 halamanYoshimura Rs3 Slip On Exhaust Honda Cbr600 f4 I20012006Ahmed WahidBelum ada peringkat
- Aero EngineDokumen118 halamanAero EngineTarun Choudhary100% (1)
- Valvulas Moog Hoja de DatosDokumen24 halamanValvulas Moog Hoja de DatosLuis Alberto RamosBelum ada peringkat
- TTester 1.10k EN 140409-1Dokumen89 halamanTTester 1.10k EN 140409-1Domingo ArroyoBelum ada peringkat
- Revisd Load Calculations Orchid HospitalDokumen11 halamanRevisd Load Calculations Orchid Hospitalsubstationlover100% (1)
- TOYO - HNS Manual - ReferencialDokumen47 halamanTOYO - HNS Manual - Referencialjesus paul cuellar zegarraBelum ada peringkat
- Rubber FormulationsDokumen17 halamanRubber FormulationsAkash Kumar83% (6)