Anda mungkin juga menyukai
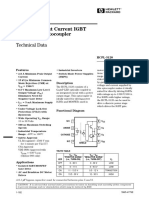
- 2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120Dokumen15 halaman2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120euromoszeusBelum ada peringkat
- WB93R-5 Wess004508 1207 PDFDokumen12 halamanWB93R-5 Wess004508 1207 PDFJuan PérezBelum ada peringkat
- Jameco Part Number 13354FSC: Distributed byDokumen8 halamanJameco Part Number 13354FSC: Distributed byJuan PérezBelum ada peringkat
- Irf9530, Sihf9530: Vishay SiliconixDokumen8 halamanIrf9530, Sihf9530: Vishay SiliconixKrista TranBelum ada peringkat
- CNH EDC Tier 3 and Tier 4a Fault Code Chart (3000-3947Dokumen20 halamanCNH EDC Tier 3 and Tier 4a Fault Code Chart (3000-3947Avs ElectronBelum ada peringkat
- Tny267pn PDFDokumen24 halamanTny267pn PDFPham LongBelum ada peringkat
- Stamford-As440-Voltage Regulator PDFDokumen4 halamanStamford-As440-Voltage Regulator PDFPablo Gaspar D'Agostini Amengual100% (2)
- WEG CFW700 Quick Parameter Reference PDFDokumen76 halamanWEG CFW700 Quick Parameter Reference PDFEdson Luiz ValandroBelum ada peringkat
- Skid Steers LoadersDokumen16 halamanSkid Steers LoadersJuan PérezBelum ada peringkat
- Buk98180 100aDokumen12 halamanBuk98180 100aX'mix ĐreamerBelum ada peringkat
- Buk98180 100aDokumen12 halamanBuk98180 100aX'mix ĐreamerBelum ada peringkat
- Suzuki F6a Engine ManualDokumen202 halamanSuzuki F6a Engine ManualJongardsOllirum70% (20)
- Texaedu s1t enDokumen12 halamanTexaedu s1t enSantosNegri100% (1)
- CNH EDC Tier 3 and Tier 4a Fault Code Chart (3000-3947Dokumen20 halamanCNH EDC Tier 3 and Tier 4a Fault Code Chart (3000-3947Avs ElectronBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- A Comparison of Subspace Methods For Sylvester Equations: Mathematics InstituteDokumen9 halamanA Comparison of Subspace Methods For Sylvester Equations: Mathematics InstituteDurga SivakumarBelum ada peringkat
- Determine Beam Deflection Using Integration and Geometric MethodsDokumen8 halamanDetermine Beam Deflection Using Integration and Geometric MethodsNadiaBelum ada peringkat
- Table-Of-Specifications-Math 9Dokumen2 halamanTable-Of-Specifications-Math 9johayma fernandezBelum ada peringkat
- Transformation of Plane StressDokumen27 halamanTransformation of Plane StressDave Harrison FloresBelum ada peringkat
- Quantitative Techniques for Management DecisionsDokumen4 halamanQuantitative Techniques for Management DecisionsFiraa'ool Yusuf100% (1)
- Sensex 1Dokumen354 halamanSensex 1raghav4life8724Belum ada peringkat
- HIMA - WhitePaper - Hybrid Systems For Smart Pipeline Management - finalEUDokumen6 halamanHIMA - WhitePaper - Hybrid Systems For Smart Pipeline Management - finalEUAndrew XuguomingBelum ada peringkat
- Trigonometry Worksheet with 15 ProblemsDokumen2 halamanTrigonometry Worksheet with 15 ProblemsChandrasegran NargesBelum ada peringkat
- Design and Analysis of an Indoor StadiumDokumen34 halamanDesign and Analysis of an Indoor StadiumChinnu Mohanan33% (6)
- FE DP1 Math AASL P1 SolDokumen10 halamanFE DP1 Math AASL P1 SolJustin Clement TjiaBelum ada peringkat
- Fun The Mystery of The Missing Kit Maths AdventureDokumen7 halamanFun The Mystery of The Missing Kit Maths AdventureJaredBelum ada peringkat
- Monthly Reference 5Dokumen22 halamanMonthly Reference 5Nurul AbrarBelum ada peringkat
- Solved For Each of The Following Examples Draw A Representative IsoquantDokumen1 halamanSolved For Each of The Following Examples Draw A Representative IsoquantM Bilal SaleemBelum ada peringkat
- Cost Optimization of Post-Tensioned I-GirderDokumen5 halamanCost Optimization of Post-Tensioned I-GirderPUENTES2407Belum ada peringkat
- Selection, Bubble, Insertion Sorts & Linear Binary Search ExplainedDokumen5 halamanSelection, Bubble, Insertion Sorts & Linear Binary Search ExplainedAndrew MagdyBelum ada peringkat
- Tabel Distribuzi Normal Z-Harus 0.5 Dikurangi PDFDokumen1 halamanTabel Distribuzi Normal Z-Harus 0.5 Dikurangi PDFLisna L. PaduaiBelum ada peringkat
- Subsea Control Systems SXGSSC PDFDokumen6 halamanSubsea Control Systems SXGSSC PDFLimuel EspirituBelum ada peringkat
- Simple Harmonic Motion and ElasticityDokumen105 halamanSimple Harmonic Motion and ElasticityyashveerBelum ada peringkat
- Rangka Batang RhezaDokumen11 halamanRangka Batang RhezaKABINET JALADARA NABDABelum ada peringkat
- Application of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationDokumen7 halamanApplication of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationijsretBelum ada peringkat
- Design of Predictive Magic Cards.Dokumen26 halamanDesign of Predictive Magic Cards.aries25th3Belum ada peringkat
- 199307Dokumen87 halaman199307vtvuckovicBelum ada peringkat
- CISE-302-Linear-Control-Systems-Lab-Manual 1Dokumen22 halamanCISE-302-Linear-Control-Systems-Lab-Manual 1ffffffBelum ada peringkat
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDokumen22 halamanCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakBelum ada peringkat
- Evolutionary Computation:: Genetic AlgorithmsDokumen49 halamanEvolutionary Computation:: Genetic AlgorithmsShobanraj LetchumananBelum ada peringkat
- Etabs NotesDokumen11 halamanEtabs Noteskarimunnisa sheikBelum ada peringkat
- The Boat Traveled 92.5 Feet.: Angle of ElevationDokumen5 halamanThe Boat Traveled 92.5 Feet.: Angle of ElevationMBelum ada peringkat
- What Is KnowledgeDokumen7 halamanWhat Is KnowledgeRaunakMishraBelum ada peringkat
- Structure Chap-7 Review ExDokumen7 halamanStructure Chap-7 Review Exabenezer g/kirstosBelum ada peringkat
- Multi-Objective Optimization For Football Team Member SelectionDokumen13 halamanMulti-Objective Optimization For Football Team Member SelectionSezim Tokozhan kyzyBelum ada peringkat