Anda mungkin juga menyukai
- Unit IV 8255 PIO Programmable Input Output PortDokumen42 halamanUnit IV 8255 PIO Programmable Input Output Portadithya12345690% (10)
- 04 - Lab04 - IO - Ports - Using - The - 8255 - PPI - Device PDFDokumen12 halaman04 - Lab04 - IO - Ports - Using - The - 8255 - PPI - Device PDFsaid sakićBelum ada peringkat
- MP ManualDokumen30 halamanMP Manualvarsha bhatBelum ada peringkat
- 8255 PPI - Ppi Programmable Peripheral InterfaceDokumen62 halaman8255 PPI - Ppi Programmable Peripheral InterfaceVport PortBelum ada peringkat
- Unit - III: The 8255 Programmable Peripheral InterfaceDokumen32 halamanUnit - III: The 8255 Programmable Peripheral Interfaceمحمد لياقت حسينBelum ada peringkat
- MP PrintDokumen64 halamanMP PrintpoonamBelum ada peringkat
- ES Lab FileDokumen37 halamanES Lab FileMøhït JáñgírBelum ada peringkat
- 8255Dokumen4 halaman8255Manish RauniyarBelum ada peringkat
- 80511Dokumen123 halaman80511snehith009100% (1)
- Micro Final TRMPPRDokumen13 halamanMicro Final TRMPPRDeependra DabasBelum ada peringkat
- 8255 Mode 1,2 TD PDFDokumen26 halaman8255 Mode 1,2 TD PDFNaveen Kishore GattimBelum ada peringkat
- EM785830AA: 8-Bit Micro-ControllerDokumen43 halamanEM785830AA: 8-Bit Micro-ControllerboleplBelum ada peringkat
- Experiment 7 Serial Port Control - 8251Dokumen3 halamanExperiment 7 Serial Port Control - 8251AliMirzaieBelum ada peringkat
- 8255Dokumen25 halaman8255Phạm HùngBelum ada peringkat
- Basics of Peripheral Devices and WorkingDokumen33 halamanBasics of Peripheral Devices and WorkingNarasimha Murthy Yayavaram100% (1)
- Expt. No. 4 Interfacing Display Devices With 8051Dokumen13 halamanExpt. No. 4 Interfacing Display Devices With 8051UJBelum ada peringkat
- Mpmcnotesunit IIIDokumen34 halamanMpmcnotesunit IIIAmy OliverBelum ada peringkat
- Peripheral Interfacing Unit Iii: Mr. S. Vinod Lecturer Eee DepartmentDokumen123 halamanPeripheral Interfacing Unit Iii: Mr. S. Vinod Lecturer Eee DepartmentVinod SrinivasanBelum ada peringkat
- Datasheet 82C55Dokumen26 halamanDatasheet 82C55Paulo VictorBelum ada peringkat
- 5 82c55 Programmable Peripheral Interface1 PDFDokumen37 halaman5 82c55 Programmable Peripheral Interface1 PDFMotasim ShahinBelum ada peringkat
- MCP2016 16 Bit I-O I2C PDFDokumen38 halamanMCP2016 16 Bit I-O I2C PDFwhynot05Belum ada peringkat
- Tty To Rs232Dokumen8 halamanTty To Rs232sandeepverma8257100% (2)
- A Microprocessor Based Black and White Image ScannerDokumen13 halamanA Microprocessor Based Black and White Image ScannerPraveen Kumar SinghBelum ada peringkat
- Mpa Question Bank1Dokumen16 halamanMpa Question Bank1Sharon FrancisBelum ada peringkat
- Micro Processor 8085Dokumen8 halamanMicro Processor 8085BravoYusuf100% (2)
- Verilog CodesDokumen4 halamanVerilog CodesHusnain AliBelum ada peringkat
- Automation NotesDokumen28 halamanAutomation NotesSonal Power UnlimitdBelum ada peringkat
- Lab AshDokumen5 halamanLab AshMuhd DeenBelum ada peringkat
- Features Description: CMOS Programmable Peripheral InterfaceDokumen22 halamanFeatures Description: CMOS Programmable Peripheral InterfaceNegru P. PlantatieBelum ada peringkat
- Intelligent Water Control System Using 8051 (AT89C51) : Project ReportDokumen12 halamanIntelligent Water Control System Using 8051 (AT89C51) : Project ReportNadeem AnjumBelum ada peringkat
- 8085 Memory InterfacingDokumen17 halaman8085 Memory InterfacingMadhavan SamBelum ada peringkat
- Instrumentation II Lab2 - 9Dokumen5 halamanInstrumentation II Lab2 - 9Patiram YadavBelum ada peringkat
- Chapter 2: 8255 Programmable Peripheral Interface: Department of MechatronicsDokumen29 halamanChapter 2: 8255 Programmable Peripheral Interface: Department of MechatronicsTho Ho DucBelum ada peringkat
- Features Description: CMOS Programmable Peripheral InterfaceDokumen26 halamanFeatures Description: CMOS Programmable Peripheral Interfaceanh_em5503Belum ada peringkat
- 8255A Programmable: Peripheral Interface (PPI)Dokumen26 halaman8255A Programmable: Peripheral Interface (PPI)ShazidBelum ada peringkat
- Unit - III InterfacingDokumen53 halamanUnit - III InterfacingPavan ParthikBelum ada peringkat
- Expt No 10 - LCD MSG DisplayDokumen10 halamanExpt No 10 - LCD MSG DisplayshreyaBelum ada peringkat
- 4.motor ApplicationDokumen8 halaman4.motor ApplicationAkram TahaBelum ada peringkat
- Jiunkpe Ns s1 1998 23492070 14716 Timer AppendicesDokumen20 halamanJiunkpe Ns s1 1998 23492070 14716 Timer AppendicestongkomputerBelum ada peringkat
- Embedded MicrocontrollerDokumen30 halamanEmbedded MicrocontrollervinoliabenitaBelum ada peringkat
- Unit 3 - Peripheral InterfacingDokumen56 halamanUnit 3 - Peripheral InterfacingSathiyarajBelum ada peringkat
- Microp LAB RecordDokumen10 halamanMicrop LAB RecordH A MDBelum ada peringkat
- Ppi 8255Dokumen163 halamanPpi 8255Taufik Mage3Belum ada peringkat
- 8085 MicroprocessorDokumen70 halaman8085 MicroprocessorPrasath Rajendran100% (11)
- Interfacing Programs For 8085Dokumen37 halamanInterfacing Programs For 8085archankumarturagaBelum ada peringkat
- 82C55 PpiDokumen22 halaman82C55 PpiMD AminBelum ada peringkat
- PLC QuestionDokumen14 halamanPLC QuestionWaseem AhmadBelum ada peringkat
- Unit 4Dokumen108 halamanUnit 4Rasool NayabBelum ada peringkat
- 20EC3352 LAB EXPERIMENTS OldDokumen47 halaman20EC3352 LAB EXPERIMENTS Oldswathi kesanaBelum ada peringkat
- Data Transfer Techniques and 110 Ports - : ExampleDokumen2 halamanData Transfer Techniques and 110 Ports - : Examplenanda_kavalaBelum ada peringkat
- 8255aDokumen67 halaman8255apranavmahajan45Belum ada peringkat
- 8255 ReportDokumen12 halaman8255 Reportapi-26100966Belum ada peringkat
- 2 Digit Token Display System ReportDokumen9 halaman2 Digit Token Display System Reportdeardestiny100% (1)
- Interfacing ICs - 8255Dokumen48 halamanInterfacing ICs - 8255Adarsh AnandBelum ada peringkat
- 1Dokumen29 halaman1Ronniel de RamosBelum ada peringkat
- Projects With Microcontrollers And PICCDari EverandProjects With Microcontrollers And PICCPenilaian: 5 dari 5 bintang5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Phase-Locked Loop (PLL) : EE174 - SJSU Tan NguyenDokumen40 halamanPhase-Locked Loop (PLL) : EE174 - SJSU Tan NguyenriponkumarBelum ada peringkat
- Controlling 4ECEDokumen23 halamanControlling 4ECEKeilla Romabiles LeopandoBelum ada peringkat
- MCQ1Dokumen51 halamanMCQ1Keilla Romabiles LeopandoBelum ada peringkat
- Cpe083 Lecture2Dokumen9 halamanCpe083 Lecture2Keilla Romabiles LeopandoBelum ada peringkat
- Correlation & ConvolutionDokumen17 halamanCorrelation & ConvolutionKeilla Romabiles LeopandoBelum ada peringkat
- MCQ2-Sat ComDokumen41 halamanMCQ2-Sat ComKeilla Romabiles LeopandoBelum ada peringkat
- Assignment ADIDokumen2 halamanAssignment ADIKeilla Romabiles LeopandoBelum ada peringkat
- Integral&DerivativeDokumen2 halamanIntegral&DerivativeKeilla Romabiles LeopandoBelum ada peringkat
- Emergency PreparednessDokumen16 halamanEmergency PreparednessKeilla Romabiles LeopandoBelum ada peringkat
- DectobcdDokumen2 halamanDectobcdKeilla Romabiles LeopandoBelum ada peringkat
- ProblemSet1 LeopandoDokumen10 halamanProblemSet1 LeopandoKeilla Romabiles LeopandoBelum ada peringkat
- The Second Law of Thermodynamics: MAE 320 - Chapter 6Dokumen8 halamanThe Second Law of Thermodynamics: MAE 320 - Chapter 6Keilla Romabiles LeopandoBelum ada peringkat
- Emergency PreparednessDokumen16 halamanEmergency PreparednessKeilla Romabiles LeopandoBelum ada peringkat
- Motion - 1&2DDokumen2 halamanMotion - 1&2DKeilla Romabiles LeopandoBelum ada peringkat
- Notes/Lect 4 MMTDokumen19 halamanNotes/Lect 4 MMTKeilla Romabiles LeopandoBelum ada peringkat
- Electrical SafetyDokumen15 halamanElectrical SafetyKeilla Romabiles LeopandoBelum ada peringkat
- Emergency PreparednessDokumen16 halamanEmergency PreparednessKeilla Romabiles LeopandoBelum ada peringkat
- xs01 PDFDokumen3 halamanxs01 PDFKeilla Romabiles LeopandoBelum ada peringkat
- Chopper FormulaDokumen1 halamanChopper FormulaKeilla Romabiles LeopandoBelum ada peringkat
- Math 151 (WN10) CH 3 NotesDokumen52 halamanMath 151 (WN10) CH 3 NotesKeilla Romabiles LeopandoBelum ada peringkat
- Solution Quiz3 INME4045 2004Dokumen2 halamanSolution Quiz3 INME4045 2004Keilla Romabiles LeopandoBelum ada peringkat
- Solution Quiz3 INME4045 2004 PDFDokumen2 halamanSolution Quiz3 INME4045 2004 PDFKeilla Romabiles LeopandoBelum ada peringkat
- Ass2 Broadcast FinalDokumen2 halamanAss2 Broadcast FinalKeilla Romabiles LeopandoBelum ada peringkat
- Lecture 1 Acoustic FundamentalsDokumen50 halamanLecture 1 Acoustic FundamentalsKeilla Romabiles LeopandoBelum ada peringkat
- GATE EE 2002 Actual Paper PDFDokumen24 halamanGATE EE 2002 Actual Paper PDFKeilla Romabiles LeopandoBelum ada peringkat
- PHYS 102 - Exam 1 - Spring 2015: Identify The Choice That Best Completes The Statement or Answers The QuestionDokumen6 halamanPHYS 102 - Exam 1 - Spring 2015: Identify The Choice That Best Completes The Statement or Answers The QuestionKeilla Romabiles LeopandoBelum ada peringkat
- KBP Broadcast Code 2011Dokumen52 halamanKBP Broadcast Code 2011Jairdan BabacBelum ada peringkat
- Circuits Practice Test KeyDokumen6 halamanCircuits Practice Test KeyKeilla Romabiles LeopandoBelum ada peringkat
- Circuits Practice Test KeyDokumen6 halamanCircuits Practice Test KeyKeilla Romabiles LeopandoBelum ada peringkat
- Chapter 14Dokumen24 halamanChapter 14Keilla Romabiles LeopandoBelum ada peringkat
- Beving BKV VT-80 ENDokumen4 halamanBeving BKV VT-80 ENJuan Pablo Chumba LaraBelum ada peringkat
- Product Data Sheet: Relayaux - Fast Trip and Lockout Relay - 8 C/O - Pick-Up Time 10 Ms - 220 V DCDokumen3 halamanProduct Data Sheet: Relayaux - Fast Trip and Lockout Relay - 8 C/O - Pick-Up Time 10 Ms - 220 V DCKuenley TiNy OndeBelum ada peringkat
- HISIC450 Overheight Detectors: Reliable Overheight Detection of VehiclesDokumen8 halamanHISIC450 Overheight Detectors: Reliable Overheight Detection of Vehiclesazer NadingaBelum ada peringkat
- Grounding Rod Catalog Socome PDFDokumen3 halamanGrounding Rod Catalog Socome PDFedy yusufBelum ada peringkat
- Memory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorDokumen16 halamanMemory Interfaces Made Easy With Xilinx Fpgas and The Memory Interface GeneratorRamya NedumbalaBelum ada peringkat
- Technical Data: DescriptionDokumen4 halamanTechnical Data: DescriptionMiltongrimi GrimilBelum ada peringkat
- 2015 - Catalog - ABB Cable Accessories 145-170 KV - English - Cable Terminations CD - REV ADokumen2 halaman2015 - Catalog - ABB Cable Accessories 145-170 KV - English - Cable Terminations CD - REV ARomany AllamBelum ada peringkat
- Chapter 08 Discrete State Process ControlDokumen32 halamanChapter 08 Discrete State Process ControlJosé Blanco MendezBelum ada peringkat
- AVHDLDokumen183 halamanAVHDLIslam SamirBelum ada peringkat
- Group 8 Final Manuscript 1Dokumen41 halamanGroup 8 Final Manuscript 1Reymond Clark AdasaBelum ada peringkat
- Sony Play StationDokumen26 halamanSony Play Stationvivekmiku100% (1)
- Acer R3Dokumen102 halamanAcer R3shibilvBelum ada peringkat
- Delta ModulationDokumen44 halamanDelta ModulationJyotirmoy DekaBelum ada peringkat
- Eee-Vi-Switchgear & Protection (10ee62) - Notes PDFDokumen92 halamanEee-Vi-Switchgear & Protection (10ee62) - Notes PDFRK KBelum ada peringkat
- Tap ChangerDokumen1 halamanTap Changerduykhanh1710Belum ada peringkat
- SAIC-RTR4 User Manual 20 PagesDokumen20 halamanSAIC-RTR4 User Manual 20 PagesJim ToewsBelum ada peringkat
- Task 3 P2 Ionosphere CompleteDokumen7 halamanTask 3 P2 Ionosphere CompleteSean GalvinBelum ada peringkat
- Fast Recovery Epitaxial Diode (FRED) : Dsei 60 I 69 A V 200 V T 35 NsDokumen3 halamanFast Recovery Epitaxial Diode (FRED) : Dsei 60 I 69 A V 200 V T 35 NsAnonymous 78iAn6Belum ada peringkat
- Peltier Device Experiments PDFDokumen4 halamanPeltier Device Experiments PDFTravisBelum ada peringkat
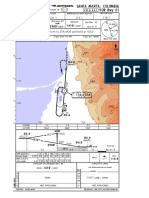
- Santa Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Dokumen1 halamanSanta Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Guillermo Serrano KelcyBelum ada peringkat
- 15 Inch PV755A Optoma PanoView PV755A MonitorDokumen3 halaman15 Inch PV755A Optoma PanoView PV755A MonitorVictor Tito C GBelum ada peringkat
- Module 1 - Advanced Computer ArchitectureDokumen15 halamanModule 1 - Advanced Computer ArchitectureDream CatcherBelum ada peringkat
- Modulation and Multiplexing Schemes in Satellite CommunicationsDokumen7 halamanModulation and Multiplexing Schemes in Satellite CommunicationsSUNILBelum ada peringkat
- BK16-EDG-04-001-REV A - Instrument Connection DiagramsDokumen3 halamanBK16-EDG-04-001-REV A - Instrument Connection DiagramsNguyen Hong QuyetBelum ada peringkat
- Publications in International Journals: S.No. Name of The Journals Title of The Paper Year of PublicationDokumen3 halamanPublications in International Journals: S.No. Name of The Journals Title of The Paper Year of Publicationmanda sridharBelum ada peringkat
- Aftron - Split AC Unit SpecDokumen2 halamanAftron - Split AC Unit Specjhay rarezaBelum ada peringkat
- Current Electricity-1 JEE Main and AdvancedDokumen8 halamanCurrent Electricity-1 JEE Main and Advancedbibhas_samantaBelum ada peringkat
- Piper Pa32r IpcDokumen414 halamanPiper Pa32r IpcJelly MortonBelum ada peringkat
- Laboratory: Generation of Am SignalsDokumen25 halamanLaboratory: Generation of Am SignalsTun ShukorBelum ada peringkat
- Molecular Orbital TutorialDokumen28 halamanMolecular Orbital TutorialehmedBelum ada peringkat