Anda mungkin juga menyukai
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Dari EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Penilaian: 5 dari 5 bintang5/5 (2)
- Simbologia de Soldadura Aws A2.4Dokumen43 halamanSimbologia de Soldadura Aws A2.4Ery FreireBelum ada peringkat
- Válvulas de seguridad: características y funcionamientoDokumen83 halamanVálvulas de seguridad: características y funcionamientoFrancisco Nabor De la Concha RomeroBelum ada peringkat
- Trabajos en Caliente Marzo 2016Dokumen61 halamanTrabajos en Caliente Marzo 2016Mario Scheggia Farfan100% (1)
- Proyecto Final - Montaña Rusa.Dokumen14 halamanProyecto Final - Montaña Rusa.Karla Andrea Hernández Gil0% (2)
- Valvulas NEUMATICASDokumen90 halamanValvulas NEUMATICASAidae SaucedaBelum ada peringkat
- Sistemas de Lazo Cerrado en el Proceso de Trillado de ArrozDokumen4 halamanSistemas de Lazo Cerrado en el Proceso de Trillado de ArrozSergio PootBelum ada peringkat
- Unidad 2 Diseño de SujetadoresDokumen7 halamanUnidad 2 Diseño de SujetadoresVictor Rábago100% (1)
- Auditoría energética: Análisis de consumos y estrategias de ahorroDokumen12 halamanAuditoría energética: Análisis de consumos y estrategias de ahorroJoseph Abel Aguillon100% (1)
- Manejo de Las Herramientas de Etiquetado EnergéticoDokumen4 halamanManejo de Las Herramientas de Etiquetado Energéticojose luis barbosa mendez100% (1)
- Generalidades en EngranajesDokumen78 halamanGeneralidades en EngranajesJorge LondoñoBelum ada peringkat
- Ing. Mecatrónica 3.2 Geometría de Herramienta de Corte Manufactura Avanzada Unidad IiiDokumen49 halamanIng. Mecatrónica 3.2 Geometría de Herramienta de Corte Manufactura Avanzada Unidad IiiLuis Antonio Barboza100% (1)
- Oliverio ExamenesDokumen7 halamanOliverio ExamenesJonathanBelum ada peringkat
- Control ON-OFFDokumen10 halamanControl ON-OFFRubén RiveraBelum ada peringkat
- Inversion CinematicaDokumen5 halamanInversion CinematicaCortazar CesarBelum ada peringkat
- Descripción y Tipos de MaquinadoDokumen3 halamanDescripción y Tipos de MaquinadoMarcos Alfredo AbreuBelum ada peringkat
- Unidad 5 M E Y E. OficialDokumen19 halamanUnidad 5 M E Y E. Oficialsantiago jarquinBelum ada peringkat
- Elementos Unidimensionales 1Dokumen47 halamanElementos Unidimensionales 1Andrés Edisson ÁguilaBelum ada peringkat
- Reconocimiento de Placas Usando Matlab - Proyecto DSP 2.0Dokumen4 halamanReconocimiento de Placas Usando Matlab - Proyecto DSP 2.0Nickolae Quintanilla ChavezBelum ada peringkat
- Diseño e Ingenieria Asistido Por ComputadoraDokumen18 halamanDiseño e Ingenieria Asistido Por ComputadoraJose Humberto RVBelum ada peringkat
- Sist Control Capitulo2Dokumen61 halamanSist Control Capitulo2Jeff BybeBelum ada peringkat
- CHRISDokumen2 halamanCHRISJose Anderson HuertaBelum ada peringkat
- Vibraciones UiiDokumen17 halamanVibraciones UiiEmmanuel GuzmánBelum ada peringkat
- Tipos de Vibraciones MecánicasDokumen7 halamanTipos de Vibraciones MecánicasLuis Andres Copa Yujra100% (1)
- Auxiliar 4 EngranajesDokumen2 halamanAuxiliar 4 EngranajesAlejandro Veliz SilvaBelum ada peringkat
- Cálculo potencia bombas ejerciciosDokumen8 halamanCálculo potencia bombas ejerciciosAlejandroBelum ada peringkat
- Transmisiones HidraulicasDokumen17 halamanTransmisiones HidraulicasEdgar MendezBelum ada peringkat
- Ing Elec Fundamentos RobóticaDokumen18 halamanIng Elec Fundamentos RobóticaCaricia Vazquez LagosBelum ada peringkat
- Arrancadores reversibles de motores trifásicos y monofásicosDokumen31 halamanArrancadores reversibles de motores trifásicos y monofásicosLeonela SalinasBelum ada peringkat
- Expo SamDokumen11 halamanExpo SamPaul DwayneBelum ada peringkat
- Unidad 6Dokumen34 halamanUnidad 6aaron linkinBelum ada peringkat
- Investigación Grados de LibertadDokumen10 halamanInvestigación Grados de LibertadJav RivBelum ada peringkat
- Sistemas MecanicosDokumen14 halamanSistemas MecanicosJose Bazan ValleBelum ada peringkat
- Sistemas de Visión IntegradosDokumen6 halamanSistemas de Visión IntegradosJonathan BarronBelum ada peringkat
- Trabajo Mecanismo LimadoraDokumen9 halamanTrabajo Mecanismo LimadoraMarlon Jahir OsorioBelum ada peringkat
- Actuadores InvestigacionDokumen26 halamanActuadores InvestigacionSol GómezBelum ada peringkat
- Sensores y transductores de flujo y caudalDokumen20 halamanSensores y transductores de flujo y caudalMonserrath Pérez50% (2)
- Como Hacer Un Engranaje RectoDokumen2 halamanComo Hacer Un Engranaje RectoMelisa PaucarBelum ada peringkat
- Bandas en VDokumen6 halamanBandas en VMay Guashco RubioBelum ada peringkat
- Trayectorias de Herramientas y Soluciones AlternasDokumen15 halamanTrayectorias de Herramientas y Soluciones AlternasFrancisco Guida100% (1)
- La Historia de La Neumática e HidraulicaDokumen4 halamanLa Historia de La Neumática e HidraulicaMichel GarcíaBelum ada peringkat
- Características Principales de Los PLCsDokumen11 halamanCaracterísticas Principales de Los PLCsNelpz Lopez0% (1)
- 4.3. Corte Por HiloDokumen4 halaman4.3. Corte Por Hiloisael sanchez garciaBelum ada peringkat
- Vibraciones o ChatterDokumen4 halamanVibraciones o Chatteralex GBelum ada peringkat
- Compresor de PistónDokumen6 halamanCompresor de PistónElizabeth Linares LopezBelum ada peringkat
- Clasificacion de Levas y SeguidoresDokumen17 halamanClasificacion de Levas y SeguidoresChristian Quito0% (1)
- Unidad 5 Diseño Mécanico II TeoriaDokumen23 halamanUnidad 5 Diseño Mécanico II TeoriaDiego Guadalupe Diaz SantiagoBelum ada peringkat
- Controles Electricos Unidad 4 Relevador ProgramableDokumen15 halamanControles Electricos Unidad 4 Relevador ProgramableLuis Bautista BelloBelum ada peringkat
- Seleccion de ActuadoresDokumen4 halamanSeleccion de ActuadoresEre0% (1)
- Simulación ventilador eléctricoDokumen5 halamanSimulación ventilador eléctricoEsperanza Benavides100% (1)
- Diferencias entre motores de CA y CCDokumen4 halamanDiferencias entre motores de CA y CCJM VRBelum ada peringkat
- Conceptos Básicos y Nociones de Lubricación GeneralDokumen9 halamanConceptos Básicos y Nociones de Lubricación GeneralJared GarciaBelum ada peringkat
- Ventajas y desventajas de los tipos de mantenimiento: correctivo, preventivo y predictivoDokumen3 halamanVentajas y desventajas de los tipos de mantenimiento: correctivo, preventivo y predictivoMisael RodriguezBelum ada peringkat
- Programación de Máquinas de CNC Con Códigos G y MDokumen9 halamanProgramación de Máquinas de CNC Con Códigos G y MLuis SuárezBelum ada peringkat
- Actividad 2Dokumen56 halamanActividad 2Enrique FanesBelum ada peringkat
- Unidad No. 1 Componentes de Un Sistema Neumatico e Hid.Dokumen21 halamanUnidad No. 1 Componentes de Un Sistema Neumatico e Hid.gonzalezlazaro5100% (1)
- Levas y Su ClasificacionDokumen9 halamanLevas y Su Clasificacionmadura123Belum ada peringkat
- Error en Estado Estable-1Dokumen6 halamanError en Estado Estable-1moro2000Belum ada peringkat
- Cuestionario Cinematica Cinetica MecanicaDokumen6 halamanCuestionario Cinematica Cinetica Mecanicadiegomontd12Belum ada peringkat
- Levas y seguidores radiales, de cara plana y de carretillaDokumen12 halamanLevas y seguidores radiales, de cara plana y de carretillaXavier AlexanderBelum ada peringkat
- Motor de Excitación IndependienteDokumen3 halamanMotor de Excitación IndependienteIVONNEBelum ada peringkat
- Consulta de FresasDokumen15 halamanConsulta de FresasJael RuizBelum ada peringkat
- Las 9 S'sDokumen9 halamanLas 9 S'sDiana Fernández TtitoBelum ada peringkat
- Aplicaciones de Los Motores DCDokumen5 halamanAplicaciones de Los Motores DCNilson AtenciaBelum ada peringkat
- Sistema biela manivela: transforma movimiento circular en alternativoDokumen6 halamanSistema biela manivela: transforma movimiento circular en alternativoFranCanavBelum ada peringkat
- Biela ManivelaDokumen7 halamanBiela ManivelaEbenezer MendivilBelum ada peringkat
- Mejora RugosidadDokumen4 halamanMejora RugosidadEry FreireBelum ada peringkat
- 1 Barra de Menus RV SPSSDokumen15 halaman1 Barra de Menus RV SPSSEry FreireBelum ada peringkat
- Preparacion de Un Paper IeeeDokumen3 halamanPreparacion de Un Paper IeeeTrosquisito Juan FgpBelum ada peringkat
- Capacidad de Transporte en Tornillo Sin FinDokumen10 halamanCapacidad de Transporte en Tornillo Sin FinEry FreireBelum ada peringkat
- Discontinuidades Con Límites AWS PDFDokumen91 halamanDiscontinuidades Con Límites AWS PDFEry FreireBelum ada peringkat
- Sistema SobreamortiguadoDokumen21 halamanSistema SobreamortiguadoEry FreireBelum ada peringkat
- Mecanismos TodoDokumen92 halamanMecanismos TodoefraacBelum ada peringkat
- Mecanizado Amigable Con El AmbienteDokumen76 halamanMecanizado Amigable Con El AmbienteEry FreireBelum ada peringkat
- Metodos de Ensayo de La MaquinabilidadDokumen9 halamanMetodos de Ensayo de La MaquinabilidadEry FreireBelum ada peringkat
- Código de Dibujo Técnico-Mecánico EcuatorianoDokumen150 halamanCódigo de Dibujo Técnico-Mecánico EcuatorianoJavier Carvajal63% (8)
- Resumen Aislantes EléctricosDokumen15 halamanResumen Aislantes EléctricosRenzo100% (3)
- Tema1 Catalizadores RuaDokumen41 halamanTema1 Catalizadores RuaIván SeguraBelum ada peringkat
- Planta TraDokumen56 halamanPlanta TraMaria Jose Martinez ArriagadaBelum ada peringkat
- Motor de InduccionDokumen2 halamanMotor de InduccionVlad VargasBelum ada peringkat
- Tipos de consumo y clasificaciónDokumen2 halamanTipos de consumo y clasificaciónJuaan Montesco0% (1)
- Diseño máquina peletizadora 1t diaria avesDokumen79 halamanDiseño máquina peletizadora 1t diaria avesMario Alvarado TapiaBelum ada peringkat
- Proyecto de Título INNOPOLDokumen235 halamanProyecto de Título INNOPOLMaría Jose SantelicesBelum ada peringkat
- Protección Convencional de Generadores SíncronosDokumen12 halamanProtección Convencional de Generadores SíncronosGiampier Elias DiazBelum ada peringkat
- Circuitos Con ReléDokumen4 halamanCircuitos Con ReléJoy TrianaBelum ada peringkat
- Zdiag. Flujo Planta AsfalticaDokumen8 halamanZdiag. Flujo Planta AsfalticaJuan Carlos Hoyos CalderonBelum ada peringkat
- Proyecto Mecanica SenatiDokumen66 halamanProyecto Mecanica SenatiBrandwin LmBelum ada peringkat
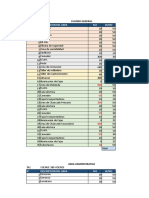
- Resumen de áreas y potencia instalada en planta industrialDokumen14 halamanResumen de áreas y potencia instalada en planta industrialEdward Anglesh Ccuno pumaBelum ada peringkat
- Requerimiento de Herramientas, Materiales e InsumosDokumen2 halamanRequerimiento de Herramientas, Materiales e InsumosAlejandro Ilizarbe AvilaBelum ada peringkat
- Mamani Montesinos Carlos Miguel Ramos Velez Frey WilsonDokumen107 halamanMamani Montesinos Carlos Miguel Ramos Velez Frey WilsonKeila M.Belum ada peringkat
- Ventiladores - Buscar Con GoogleDokumen5 halamanVentiladores - Buscar Con Googleusuario452Belum ada peringkat
- Proyecto Emp 500 y 600Dokumen30 halamanProyecto Emp 500 y 600Samuel Flores PinayaBelum ada peringkat
- Balance de EcuacionesDokumen3 halamanBalance de EcuacionesAlexis Tenorio BolivarBelum ada peringkat
- Acero SilicioDokumen3 halamanAcero SilicioElxLinoBelum ada peringkat
- Problemas Propuestos - 1 - Bloque 2Dokumen4 halamanProblemas Propuestos - 1 - Bloque 2Tarik BenkhalloukBelum ada peringkat
- Proyectos de Inversion de Briquetas 123Dokumen36 halamanProyectos de Inversion de Briquetas 123Yampier Anthony Solis HuarocBelum ada peringkat
- GGA0503222A5Dokumen1 halamanGGA0503222A5Gulf ATHENEABelum ada peringkat
- Tarea SES 2013Dokumen74 halamanTarea SES 2013ElyReyesBelum ada peringkat
- Tarea 5. Bombas de Desplazamiento Positivo Con Desplazamiento Fijo y Variable.Dokumen12 halamanTarea 5. Bombas de Desplazamiento Positivo Con Desplazamiento Fijo y Variable.JorgeCarlosBelum ada peringkat
- Investigacion de La Importancia de HidrocarburosDokumen10 halamanInvestigacion de La Importancia de Hidrocarburosbraulio alvaradoBelum ada peringkat
- Curso de Subestaciones PARTE II EQUIPAMIENTODokumen58 halamanCurso de Subestaciones PARTE II EQUIPAMIENTOLisandroBelum ada peringkat