Anda mungkin juga menyukai
- An Experimental Investigation of Nonlinear Vibration and Frequency Response Analysis of Cantilever Viscoelastic BeamsDokumen11 halamanAn Experimental Investigation of Nonlinear Vibration and Frequency Response Analysis of Cantilever Viscoelastic BeamsRotBelum ada peringkat
- CATEGORY 5: All Graphics Relate to Topic and Make Understanding EasierDokumen1 halamanCATEGORY 5: All Graphics Relate to Topic and Make Understanding EasierArnel AvilaBelum ada peringkat
- Electrical Overstress (EOS): Devices, Circuits and SystemsDari EverandElectrical Overstress (EOS): Devices, Circuits and SystemsBelum ada peringkat
- Linearization Notes Online 2Dokumen29 halamanLinearization Notes Online 2lamborghini1991Belum ada peringkat
- CounterACT Console User Manual 7.0.0 PDFDokumen763 halamanCounterACT Console User Manual 7.0.0 PDFlazarusBelum ada peringkat
- Answers To Coursebook Exercises: 1 IntegersDokumen3 halamanAnswers To Coursebook Exercises: 1 Integersammara shafique86% (21)
- INST240 Sec4Dokumen127 halamanINST240 Sec4bhanu6212Belum ada peringkat
- Updated Chapter 2 Control Systems Lecture NotesDokumen22 halamanUpdated Chapter 2 Control Systems Lecture Notesvijay rajBelum ada peringkat
- Airfoil Inverse DesignDokumen12 halamanAirfoil Inverse DesignFilip StojkovskiBelum ada peringkat
- SAPWM62 InstallationDokumen52 halamanSAPWM62 InstallationEmanuel JaggerBelum ada peringkat
- Gyro Position Control - Student ManualDokumen55 halamanGyro Position Control - Student ManualBruno Martins Leite0% (1)
- Introduction to Discrete Linear Controls: Theory and ApplicationDari EverandIntroduction to Discrete Linear Controls: Theory and ApplicationBelum ada peringkat
- Dynamic Response of Cavitating TurbomachineryDokumen208 halamanDynamic Response of Cavitating TurbomachinerymsreerajvarmaBelum ada peringkat
- Subject Code:: Data VisualizationDokumen8 halamanSubject Code:: Data VisualizationAmanBelum ada peringkat
- Extended Kalman Filter For UAV AttitudeDokumen8 halamanExtended Kalman Filter For UAV AttitudebestatscienceBelum ada peringkat
- Rotor Dynamic Modelling As A Powerfull Tool For Vibrartion Analysis of Large TurbomachineryIFTOMM 2010Dokumen7 halamanRotor Dynamic Modelling As A Powerfull Tool For Vibrartion Analysis of Large TurbomachineryIFTOMM 2010sainath_84Belum ada peringkat
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachDari EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachBelum ada peringkat
- Progress in Atomic Spectroscopy: Part ADokumen743 halamanProgress in Atomic Spectroscopy: Part Aprovocator74Belum ada peringkat
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDari EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionBelum ada peringkat
- EGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Dokumen65 halamanEGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Curro Espadafor Fernandez AmigoBelum ada peringkat
- RocketDokumen45 halamanRocketDefenceDog100% (1)
- PpoDokumen21 halamanPpoDinesh PatilBelum ada peringkat
- ECSS E ST 10C System Engineering General RequirementDokumen100 halamanECSS E ST 10C System Engineering General RequirementarcoarcoBelum ada peringkat
- Design-Patterns Cheat SheetDokumen36 halamanDesign-Patterns Cheat SheetcesarmarinhorjBelum ada peringkat
- GSLC 2 - Group 1-Hal 541 - Rabu, 05 Desember 2018Dokumen3 halamanGSLC 2 - Group 1-Hal 541 - Rabu, 05 Desember 2018twenty4seven100% (2)
- Dynamic Modeling and Ascent Flight Control of Ares-I Crew LaunchDokumen167 halamanDynamic Modeling and Ascent Flight Control of Ares-I Crew LaunchKhoa VũBelum ada peringkat
- 1D Kalman Filter - ShoudongDokumen9 halaman1D Kalman Filter - ShoudongSohibul HajahBelum ada peringkat
- RSLogix 5000 Report(s) PDFDokumen680 halamanRSLogix 5000 Report(s) PDFDaniel GtzBelum ada peringkat
- Magnus EffectDokumen6 halamanMagnus EffectZvonko TBelum ada peringkat
- Introduction To State Space Analysis: Lecture Notes by N.Selvaganesan, IIST (January - May 2018)Dokumen43 halamanIntroduction To State Space Analysis: Lecture Notes by N.Selvaganesan, IIST (January - May 2018)sithara sBelum ada peringkat
- Introduction To Convective Heat Transfer Analysis Chapter 8 PDFDokumen84 halamanIntroduction To Convective Heat Transfer Analysis Chapter 8 PDFhenrengBelum ada peringkat
- Modelling of The Three-Phase Induction Motor Using SIMULINKDokumen3 halamanModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- Thermal and Statistical Physics - Mallett - BlumlerDokumen27 halamanThermal and Statistical Physics - Mallett - BlumlerOswaldo Avalos QuispeBelum ada peringkat
- Paper Formatting GuideDokumen3 halamanPaper Formatting GuidemamatBelum ada peringkat
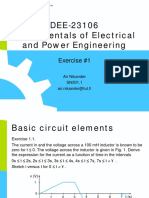
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Dokumen12 halamanDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipBelum ada peringkat
- IEEEDokumen5 halamanIEEEvishmayBelum ada peringkat
- I.E.S-(Conv.)-2000 Air Conditioning Design CalculationsDokumen6 halamanI.E.S-(Conv.)-2000 Air Conditioning Design CalculationsYogesh DanekarBelum ada peringkat
- GPS Based Soldier Tracking and Health MonitoringDokumen4 halamanGPS Based Soldier Tracking and Health MonitoringAnonymous kw8Yrp0R5r100% (2)
- Deadband+hysterisis EstimationDokumen4 halamanDeadband+hysterisis EstimationBesan LaduBelum ada peringkat
- Mo Phong Matlab Ball and BeamDokumen52 halamanMo Phong Matlab Ball and BeamHuong NguyenBelum ada peringkat
- EE3092 Corona CharacteristicsDokumen3 halamanEE3092 Corona CharacteristicsRas PqrBelum ada peringkat
- PsoDokumen17 halamanPsoKanishka SahniBelum ada peringkat
- 10 Root LocusDokumen13 halaman10 Root LocusAhmed Tanveer Ashraff100% (1)
- 3 DOF Gyroscope Courseware Sample For MATLAB UsersDokumen8 halaman3 DOF Gyroscope Courseware Sample For MATLAB UsersDragan LazicBelum ada peringkat
- Turbomolecular PumpDokumen10 halamanTurbomolecular PumpMustafa SayyedBelum ada peringkat
- Control Systems Resource SheetDokumen12 halamanControl Systems Resource SheetCharlie Ho SiBelum ada peringkat
- Generator Under ExcitationDokumen2 halamanGenerator Under ExcitationRodolfo LicuBelum ada peringkat
- Computer Methods For Orbit TransferDokumen344 halamanComputer Methods For Orbit TransferAnonymous REw1YIq4q7Belum ada peringkat
- 1977 Black - Inventing The Negative Feedback AmplifierDokumen6 halaman1977 Black - Inventing The Negative Feedback AmplifierAndreaBelum ada peringkat
- B-Spline Curve ModelingDokumen60 halamanB-Spline Curve ModelingSudeep SharmaBelum ada peringkat
- The Realization of Virtual Reality of Launching Rocket Based On Simulink and VRMLDokumen4 halamanThe Realization of Virtual Reality of Launching Rocket Based On Simulink and VRMLIJEC_EditorBelum ada peringkat
- Hamamatsu PMT HandbookDokumen292 halamanHamamatsu PMT HandbookJames SullivanBelum ada peringkat
- Solenoid Lab ManualDokumen17 halamanSolenoid Lab Manualbrandon999Belum ada peringkat
- A (Bold Faced) : by HandDokumen79 halamanA (Bold Faced) : by Handএ. এইচ ফিরোজBelum ada peringkat
- Gnuplot BasicsDokumen5 halamanGnuplot Basicsabhineet sharmaBelum ada peringkat
- Parametric ExcitationDokumen14 halamanParametric ExcitationSolomanTrismosinBelum ada peringkat
- Ch-1 Industrial MAchines and MechanicsDokumen26 halamanCh-1 Industrial MAchines and MechanicsQasim Ali0% (1)
- Contoh Soal Dan Penyelesain Ke2Dokumen4 halamanContoh Soal Dan Penyelesain Ke2Siti HannaBelum ada peringkat
- rr320803 Process Dynamics and ControlDokumen6 halamanrr320803 Process Dynamics and ControlSRINIVASA RAO GANTABelum ada peringkat
- Fluent Evaporation & CondensationDokumen27 halamanFluent Evaporation & CondensationTooba GhouriBelum ada peringkat
- Lab BasedDokumen14 halamanLab BasedMukul Goyal100% (1)
- Nasa TN D-8431Dokumen234 halamanNasa TN D-8431HarryjoshiBelum ada peringkat
- Recursive Algorithm Practice Problems SolvedDokumen92 halamanRecursive Algorithm Practice Problems Solved楊喻妃Belum ada peringkat
- LQR FeedforwardDokumen20 halamanLQR Feedforwardsri248Belum ada peringkat
- Factorization Methods for Discrete Sequential EstimationDari EverandFactorization Methods for Discrete Sequential EstimationBelum ada peringkat
- Conservation Law Ma515 2017Dokumen6 halamanConservation Law Ma515 2017teju1996coolBelum ada peringkat
- Assignment 4Dokumen2 halamanAssignment 4teju1996coolBelum ada peringkat
- AchievementsDokumen2 halamanAchievementsteju1996coolBelum ada peringkat
- 14D100020 - 1Dokumen2 halaman14D100020 - 1teju1996coolBelum ada peringkat
- MA533 Assignment 1 SolutionsDokumen2 halamanMA533 Assignment 1 Solutionsteju1996coolBelum ada peringkat
- 14D100020 - 1Dokumen2 halaman14D100020 - 1teju1996coolBelum ada peringkat
- The Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube ResonatorsDokumen12 halamanThe Nonlinear Dynamics of Electrostatically-Actuated, Single-Walled Carbon Nanotube Resonatorsteju1996coolBelum ada peringkat
- Assignment 5Dokumen1 halamanAssignment 5teju1996coolBelum ada peringkat
- Fundamental groups of topological spaces and properties of covering spacesDokumen2 halamanFundamental groups of topological spaces and properties of covering spacesteju1996coolBelum ada peringkat
- Multi-Marginal Optimal Transport: Theory and ApplicationsDokumen29 halamanMulti-Marginal Optimal Transport: Theory and Applicationsteju1996coolBelum ada peringkat
- Minor Homepage DocumentDokumen2 halamanMinor Homepage Documentteju1996coolBelum ada peringkat
- Assignment 2Dokumen1 halamanAssignment 2teju1996coolBelum ada peringkat
- 14D100020 - 0Dokumen1 halaman14D100020 - 0teju1996coolBelum ada peringkat
- 14D100020 - 1Dokumen2 halaman14D100020 - 1teju1996coolBelum ada peringkat
- NL 200950 DDokumen5 halamanNL 200950 Dteju1996coolBelum ada peringkat
- Anomalous Dissipation in Single-Walled Carbon Nanotube ResonatorsDokumen5 halamanAnomalous Dissipation in Single-Walled Carbon Nanotube Resonatorsteju1996coolBelum ada peringkat
- Nonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire ResonatorsDokumen6 halamanNonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire Resonatorsteju1996coolBelum ada peringkat
- PhysRevE 86 046208Dokumen7 halamanPhysRevE 86 046208teju1996coolBelum ada peringkat
- Nonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire ResonatorsDokumen6 halamanNonlinear and Nonplanar Dynamics of Suspended Nanotube and Nanowire Resonatorsteju1996coolBelum ada peringkat
- Coupling Between Flexural Modes in Free Vibration of Single-Walled Carbon NanotubesDokumen10 halamanCoupling Between Flexural Modes in Free Vibration of Single-Walled Carbon Nanotubesteju1996coolBelum ada peringkat
- Theoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered BeamDokumen11 halamanTheoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered Beamteju1996coolBelum ada peringkat
- RM 8Dokumen109 halamanRM 8teju1996coolBelum ada peringkat
- 1602 00508v1Dokumen6 halaman1602 00508v1teju1996coolBelum ada peringkat
- WCE2013 pp1640-1645Dokumen6 halamanWCE2013 pp1640-1645teju1996coolBelum ada peringkat
- Series ExpansionDokumen2 halamanSeries Expansionteju1996coolBelum ada peringkat
- Nano9 3 035702Dokumen7 halamanNano9 3 035702teju1996coolBelum ada peringkat
- Effects of DC voltage on initiation of whirling motion in nanowire oscillatorsDokumen30 halamanEffects of DC voltage on initiation of whirling motion in nanowire oscillatorsteju1996coolBelum ada peringkat
- Effects of DC voltage on initiation of whirling motion in nanowire oscillatorsDokumen30 halamanEffects of DC voltage on initiation of whirling motion in nanowire oscillatorsteju1996coolBelum ada peringkat
- Rotopeka - May-June 2009Dokumen8 halamanRotopeka - May-June 2009The Rotary Club of Topeka100% (3)
- The Impacts of Internet To SocietyDokumen1 halamanThe Impacts of Internet To SocietyAlviona SalsabillaBelum ada peringkat
- DAS 3224 ManualDokumen67 halamanDAS 3224 ManualyencalseBelum ada peringkat
- 2018 Metrobank-MTAP-DepEd Math Challenge National Finals Grade 10 Individual Oral Competition QuestionsDokumen5 halaman2018 Metrobank-MTAP-DepEd Math Challenge National Finals Grade 10 Individual Oral Competition QuestionsHarris Lee50% (2)
- Consolidated Changes For 59 The DitionDokumen613 halamanConsolidated Changes For 59 The DitionSHERIEFBelum ada peringkat
- Creating Interactive OLAP Applications With MySQL Enterprise and MondrianDokumen37 halamanCreating Interactive OLAP Applications With MySQL Enterprise and MondrianOleksiy Kovyrin100% (10)
- Chapter 6 Solution PDFDokumen7 halamanChapter 6 Solution PDFgauravroongtaBelum ada peringkat
- Information Resources Information Systems: Management Information Systems 8/E Raymond Mcleod, Jr. and George SchellDokumen34 halamanInformation Resources Information Systems: Management Information Systems 8/E Raymond Mcleod, Jr. and George SchellAbdul LatifBelum ada peringkat
- LED User's ManualDokumen13 halamanLED User's ManualCristiBelum ada peringkat
- Determinants NotesDokumen3 halamanDeterminants NotesSoham PatilBelum ada peringkat
- W Products KeysDokumen4 halamanW Products KeysAdrian RoigBelum ada peringkat
- Mining Frequent Itemsets and Association RulesDokumen59 halamanMining Frequent Itemsets and Association RulesSandeep DwivediBelum ada peringkat
- Object Oriented SAD-2 Part IDokumen80 halamanObject Oriented SAD-2 Part IbtittyBelum ada peringkat
- Taylor Introms11GE PPT 02Dokumen45 halamanTaylor Introms11GE PPT 02hddankerBelum ada peringkat
- Stacks and QueuesDokumen21 halamanStacks and QueuesDhivya NBelum ada peringkat
- INTRODUCTIONDokumen35 halamanINTRODUCTIONAmit HBelum ada peringkat
- MillionDokumen488 halamanMillionSandruka AnzutlBelum ada peringkat
- Libros Vs EbooksDokumen19 halamanLibros Vs EbooksOscarito ArriagadaBelum ada peringkat
- Acc400 Chapter 8 Quiz Note FileDokumen6 halamanAcc400 Chapter 8 Quiz Note Filemad_hatter_Belum ada peringkat
- Dynamic ProgrammingDokumen52 halamanDynamic ProgrammingattaullahchBelum ada peringkat
- Chapter 4 Unsupervised Learning Dimensionality Reduction and Learning TheoryDokumen32 halamanChapter 4 Unsupervised Learning Dimensionality Reduction and Learning TheoryShefali DigikarBelum ada peringkat
- Career Objective:: Arumugam.MDokumen3 halamanCareer Objective:: Arumugam.MarwinBelum ada peringkat
- Keypoints Algebra 1 ADokumen3 halamanKeypoints Algebra 1 AtnezkiBelum ada peringkat