Anda mungkin juga menyukai
- MATH3161 Lecture 1Dokumen7 halamanMATH3161 Lecture 1BobBelum ada peringkat
- 189 Cheat Sheet MinicardsDokumen2 halaman189 Cheat Sheet Minicardst rex422Belum ada peringkat
- Non Linear Programming ProblemsDokumen66 halamanNon Linear Programming Problemsbits_who_am_iBelum ada peringkat
- Numerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectDokumen24 halamanNumerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectkahvumidragaispeciBelum ada peringkat
- MATH 122 Critical PointsDokumen4 halamanMATH 122 Critical PointsEzekiel PeterBelum ada peringkat
- 4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MDokumen10 halaman4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MverbicarBelum ada peringkat
- M100 - 10mid1sol - 10.12Dokumen2 halamanM100 - 10mid1sol - 10.12Eric ZhangBelum ada peringkat
- Constraint QualificationDokumen7 halamanConstraint Qualificationcharles luisBelum ada peringkat
- Constraint QualificationDokumen7 halamanConstraint QualificationWhattlial53Belum ada peringkat
- UUM 526 Optimization Techniques in Engineering Spring 2018-2019 Problem Set IDokumen3 halamanUUM 526 Optimization Techniques in Engineering Spring 2018-2019 Problem Set I_MerKeZ_Belum ada peringkat
- Unit 7: Cutting Plane AlgorithmsDokumen28 halamanUnit 7: Cutting Plane AlgorithmskartikdpBelum ada peringkat
- Exercise Part IIDokumen7 halamanExercise Part IICo londota2Belum ada peringkat
- SAT: Propositional Satisfiability: A TutorialDokumen37 halamanSAT: Propositional Satisfiability: A Tutorialsend_2meBelum ada peringkat
- MATP6620 Integer and Combinatorial OptimizationDokumen4 halamanMATP6620 Integer and Combinatorial OptimizationArya ChowdhuryBelum ada peringkat
- PQT PDFDokumen113 halamanPQT PDFchandu pandhareBelum ada peringkat
- X X X X X F X X X R X D: Question 1 (20 Marks - 5 Each)Dokumen6 halamanX X X X X F X X X R X D: Question 1 (20 Marks - 5 Each)Evan AzizBelum ada peringkat
- 12 OD Nonlinear Programming B-2008-2Dokumen6 halaman12 OD Nonlinear Programming B-2008-2carolinarvsocnBelum ada peringkat
- HW1 SolnDokumen2 halamanHW1 Solntysoccer12Belum ada peringkat
- Wei 2014Dokumen16 halamanWei 2014abbasbinBelum ada peringkat
- Math 105 Practice Exam 3 SolutionsDokumen3 halamanMath 105 Practice Exam 3 SolutionsexamkillerBelum ada peringkat
- EC400 Exam Solution 2012 MicroDokumen6 halamanEC400 Exam Solution 2012 MicroAvijit PuriBelum ada peringkat
- Classical Optimization Theory Quadratic Forms: Let Be A N-VectorDokumen48 halamanClassical Optimization Theory Quadratic Forms: Let Be A N-VectorAngad SehdevBelum ada peringkat
- Lecture 13Dokumen20 halamanLecture 13Aya ZaiedBelum ada peringkat
- Introduction To Simulation - Lecture 22: Integral Equation MethodsDokumen32 halamanIntroduction To Simulation - Lecture 22: Integral Equation MethodsHenrique Mariano AmaralBelum ada peringkat
- Class 11 Maths Important Questions Limits and DerivativesDokumen9 halamanClass 11 Maths Important Questions Limits and DerivativesRoy67% (6)
- Math 221 Solution To ProblemsDokumen16 halamanMath 221 Solution To ProblemsRyan Kristoffer NuñezBelum ada peringkat
- LMI Methods in Optimal and Robust ControlDokumen31 halamanLMI Methods in Optimal and Robust ControltahourahmedBelum ada peringkat
- Nonlinear ProgrammingDokumen35 halamanNonlinear ProgrammingPreethi GopalanBelum ada peringkat
- Derivative Tests SummaryDokumen5 halamanDerivative Tests Summarydalmikhaila9Belum ada peringkat
- Project 1Dokumen13 halamanProject 1sunjeevBelum ada peringkat
- MATH3161 UnswDokumen30 halamanMATH3161 UnswMaria DeeTee NguyenBelum ada peringkat
- 4.3 Problems With Inequality Constraints: General FormDokumen6 halaman4.3 Problems With Inequality Constraints: General FormEverton CollingBelum ada peringkat
- Problem#1: Figure1: Cross Section of BeamDokumen13 halamanProblem#1: Figure1: Cross Section of BeamAliRazaBelum ada peringkat
- Statistical Methods NotesDokumen9 halamanStatistical Methods NotesDennis Uygur AnderssonBelum ada peringkat
- Combinatorics 16Dokumen11 halamanCombinatorics 16Avani KumarBelum ada peringkat
- Sparsity and Its MathematicsDokumen44 halamanSparsity and Its MathematicsjwdaliBelum ada peringkat
- Midterm ReviewDokumen72 halamanMidterm ReviewOgonna NwabuikwuBelum ada peringkat
- Operation ResearchDokumen23 halamanOperation ResearchTahera ParvinBelum ada peringkat
- Random Variables (Cont'd) : Section 2.4: The Variance of A Random VariableDokumen19 halamanRandom Variables (Cont'd) : Section 2.4: The Variance of A Random VariableCharifa SaadiBelum ada peringkat
- Interpolation - Introduction: NTH n+1Dokumen51 halamanInterpolation - Introduction: NTH n+1atenhyunaeBelum ada peringkat
- Practice MidtermDokumen8 halamanPractice MidtermOlabiyi RidwanBelum ada peringkat
- Midterm 01 PracticeDokumen7 halamanMidterm 01 PracticeEvan LeeBelum ada peringkat
- Penalty, Barrier and Augmented Lagrangian MethodsDokumen10 halamanPenalty, Barrier and Augmented Lagrangian MethodsnisactBelum ada peringkat
- Formula Rio CNDokumen5 halamanFormula Rio CNJoão OliveiraBelum ada peringkat
- Equality Constrained Optimization: Daniel P. RobinsonDokumen33 halamanEquality Constrained Optimization: Daniel P. RobinsonJosue CofeeBelum ada peringkat
- Algebra Worksheet 2020Dokumen13 halamanAlgebra Worksheet 2020Taya LewendonBelum ada peringkat
- Modeling, Simulation and Optimisation For Chemical EngineeringDokumen22 halamanModeling, Simulation and Optimisation For Chemical EngineeringHậu Lê TrungBelum ada peringkat
- Differnetial Equation Cheat SheetDokumen5 halamanDiffernetial Equation Cheat SheetDebayan Dasgupta100% (5)
- OptimizationAlgorithms IIDokumen21 halamanOptimizationAlgorithms IISaheera Hazarika0% (1)
- Lec02 2012eightDokumen5 halamanLec02 2012eightPhạm Ngọc HòaBelum ada peringkat
- 1 Mathematical Preliminaries 2Dokumen17 halaman1 Mathematical Preliminaries 2shubhamBelum ada peringkat
- MATF 104 College Algebra - Chapter 2Dokumen40 halamanMATF 104 College Algebra - Chapter 2sf1d100% (1)
- 2233 mt1 S99sDokumen5 halaman2233 mt1 S99sAkoh C Josh ÜBelum ada peringkat
- DSS - Fuzzy (Literature)Dokumen26 halamanDSS - Fuzzy (Literature)Meliana AesyBelum ada peringkat
- Fundamental of Mathematics-IIDokumen23 halamanFundamental of Mathematics-IIShival KatheBelum ada peringkat
- Nonlinear OptimizationDokumen6 halamanNonlinear OptimizationKibria PrangonBelum ada peringkat
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsDari EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsBelum ada peringkat
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDari EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankBelum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- ch19 3Dokumen40 halamanch19 3BobBelum ada peringkat
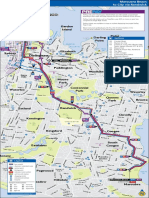
- 376 - 377 Bus MapDokumen1 halaman376 - 377 Bus MapBobBelum ada peringkat
- 376 - 377 Bus Time TableDokumen19 halaman376 - 377 Bus Time TableBobBelum ada peringkat
- Calc 1141 2Dokumen27 halamanCalc 1141 2BobBelum ada peringkat
- The Global Financial Crisis: - An Actuarial PerspectiveDokumen3 halamanThe Global Financial Crisis: - An Actuarial PerspectiveBobBelum ada peringkat
- ch4 5Dokumen37 halamanch4 5BobBelum ada peringkat
- Is Insurance A Luxury?Dokumen3 halamanIs Insurance A Luxury?BobBelum ada peringkat
- Takaful: An Islamic Alternative To Conventional Insurance Sees Phenomenal GrowthDokumen3 halamanTakaful: An Islamic Alternative To Conventional Insurance Sees Phenomenal GrowthBobBelum ada peringkat
- Rules of Professional ConductDokumen9 halamanRules of Professional ConductBobBelum ada peringkat
- International: 2020 VisionDokumen5 halamanInternational: 2020 VisionBobBelum ada peringkat
- Hapter Xercise OlutionsDokumen5 halamanHapter Xercise OlutionsBobBelum ada peringkat
- Draft Standards For The Development of Spreadsheets: 1 Spreadsheets Can Be AssetsDokumen5 halamanDraft Standards For The Development of Spreadsheets: 1 Spreadsheets Can Be AssetsBobBelum ada peringkat
- Signs of Ageing: HealthcareDokumen2 halamanSigns of Ageing: HealthcareBobBelum ada peringkat
- Code of Conduct For Candidates: Effective December 1, 2008Dokumen2 halamanCode of Conduct For Candidates: Effective December 1, 2008BobBelum ada peringkat
- The Uk Actuarial Profession The Actuaries' Code: ApplicationDokumen3 halamanThe Uk Actuarial Profession The Actuaries' Code: ApplicationBobBelum ada peringkat
- Pension Benefit Design: Flexibility and The Integration of Insurance Over The Life CycleDokumen43 halamanPension Benefit Design: Flexibility and The Integration of Insurance Over The Life CycleBobBelum ada peringkat
- Chapter 3: Professionalism Exercise Sample Solutions Exercise 3.1Dokumen6 halamanChapter 3: Professionalism Exercise Sample Solutions Exercise 3.1BobBelum ada peringkat
- Institute of Actuaries of India: Professional Conduct Standards (Referred To As PCS)Dokumen9 halamanInstitute of Actuaries of India: Professional Conduct Standards (Referred To As PCS)BobBelum ada peringkat
- Code of Professional Conduct: Section 5Dokumen4 halamanCode of Professional Conduct: Section 5BobBelum ada peringkat
- Code of Professional Conduct November 2009: IndexDokumen10 halamanCode of Professional Conduct November 2009: IndexBobBelum ada peringkat
- Expert Input: On The Current Financial CrisisDokumen7 halamanExpert Input: On The Current Financial CrisisBobBelum ada peringkat
- Chapter 2 Exercises and Solutions: Exercise 2.1Dokumen3 halamanChapter 2 Exercises and Solutions: Exercise 2.1BobBelum ada peringkat
- Doors Of: December 2009/january 2010Dokumen6 halamanDoors Of: December 2009/january 2010BobBelum ada peringkat
- Faculty of Business & Law School of Marketing and Management MODULE TITLE: Innovation and Change Module Code: 310HRM Type of Assessment: Essay Proportion of Module Mark: 100% (50% For Each Task)Dokumen5 halamanFaculty of Business & Law School of Marketing and Management MODULE TITLE: Innovation and Change Module Code: 310HRM Type of Assessment: Essay Proportion of Module Mark: 100% (50% For Each Task)Sơn BadGuyBelum ada peringkat
- Theoretical Framework & HypothesisDokumen28 halamanTheoretical Framework & HypothesisDjoko PriyonoBelum ada peringkat
- Solutions Advanced Econometrics 1 Midterm 2013Dokumen3 halamanSolutions Advanced Econometrics 1 Midterm 2013Esmée WinnubstBelum ada peringkat
- EmSAT Physics College Entry Exam Sample Items EnglishDokumen19 halamanEmSAT Physics College Entry Exam Sample Items EnglishAnjana100% (1)
- Non Linearity in Structural DynamicsDokumen679 halamanNon Linearity in Structural Dynamicsashkantorabi100% (1)
- QuestionsDokumen4 halamanQuestionsJanet Brigida CatiponBelum ada peringkat
- Valuation-Dividend Discount ModelDokumen23 halamanValuation-Dividend Discount Modelswaroop shettyBelum ada peringkat
- Envelope TheoremDokumen9 halamanEnvelope TheoremEconomics KnowledgeBelum ada peringkat
- Initial Value ThoermDokumen61 halamanInitial Value ThoermTushar DagaBelum ada peringkat
- Textbook Distribution-TablesDokumen1 halamanTextbook Distribution-TableskakkrasBelum ada peringkat
- FX Ax BX C: The Quadratic Function - Chapter 8Dokumen8 halamanFX Ax BX C: The Quadratic Function - Chapter 8api-298592212Belum ada peringkat
- Thapar University, Patiala Department of Chemical Engineering E To D (February 2018)Dokumen2 halamanThapar University, Patiala Department of Chemical Engineering E To D (February 2018)Vinay DograBelum ada peringkat
- L29 - Dynamic Programming (Continued)Dokumen35 halamanL29 - Dynamic Programming (Continued)Nirmit50% (2)
- ECE5340-6340 SyllabusDokumen4 halamanECE5340-6340 Syllabuskhanafzaal2576Belum ada peringkat
- Topology From The Differentiable Viewpoint (Milnor) PDFDokumen157 halamanTopology From The Differentiable Viewpoint (Milnor) PDFShaul Barkan100% (1)
- Validation of System Dynamics Models - A Case Study: Justyna Lemke, Małgorzata ŁatuszyńskaDokumen15 halamanValidation of System Dynamics Models - A Case Study: Justyna Lemke, Małgorzata ŁatuszyńskaMadinahBelum ada peringkat
- Lecture 6Dokumen3 halamanLecture 6Tấn Long LêBelum ada peringkat
- Policy Papers: Writer'S GuideDokumen53 halamanPolicy Papers: Writer'S GuideRokzxc GamingBelum ada peringkat
- System+Dynamics+3+Edition+WillPALM (043 083)Dokumen41 halamanSystem+Dynamics+3+Edition+WillPALM (043 083)Rosy Chávez Hernández100% (1)
- Practice - Test - 2 - Systems - of - Inequalities 4Dokumen4 halamanPractice - Test - 2 - Systems - of - Inequalities 4Destiny OnealBelum ada peringkat
- Sheet (2) Fits and TolerancesDokumen1 halamanSheet (2) Fits and TolerancesAjit Kumar0% (1)
- Practical Journal (To All Department)Dokumen71 halamanPractical Journal (To All Department)Israr AhmedBelum ada peringkat
- Lecture 5 Topic 4 Stat InferenceDokumen16 halamanLecture 5 Topic 4 Stat Inferencelondindlovu410Belum ada peringkat
- EE370 Lab Experiment 01Dokumen6 halamanEE370 Lab Experiment 01Ayman YounisBelum ada peringkat
- Differential EquationsDokumen73 halamanDifferential EquationsJhemson ELis100% (1)
- Test of HypothesesDokumen26 halamanTest of Hypothesesparkcheri0% (1)
- VAN DIJK KINTSCH Strategies of Discourse Comprehension PDFDokumen195 halamanVAN DIJK KINTSCH Strategies of Discourse Comprehension PDFAdriana SantosBelum ada peringkat
- NCERT Solutions Class 12 Maths Chapter 9 Differential EquationsDokumen50 halamanNCERT Solutions Class 12 Maths Chapter 9 Differential EquationsVidyakulBelum ada peringkat
- TQ - StatDokumen9 halamanTQ - StatJohn Mark Fernandez DanlagBelum ada peringkat
- A One Layer Recurrent Neural Network For Nonsmooth Pseudoconvex - 2022 - NeuralDokumen9 halamanA One Layer Recurrent Neural Network For Nonsmooth Pseudoconvex - 2022 - NeuralmadhusundarBelum ada peringkat