Anda mungkin juga menyukai
- Tedy Kuswara: A StorytellerDokumen1 halamanTedy Kuswara: A StorytellerAnonymous hWj4HKIDOFBelum ada peringkat
- The Speed of Trust: Based On The Book by Stephen MR CoveyDokumen34 halamanThe Speed of Trust: Based On The Book by Stephen MR CoveyAnonymous hWj4HKIDOF100% (1)
- Schedule PlanDokumen3 halamanSchedule PlanAnonymous hWj4HKIDOFBelum ada peringkat
- Jadwal Juli - Oktober 2016 HarianDokumen1 halamanJadwal Juli - Oktober 2016 HarianAnonymous hWj4HKIDOFBelum ada peringkat
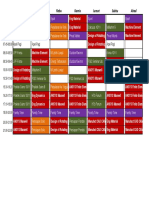
- Jadwal Persiapan S2 v2Dokumen1 halamanJadwal Persiapan S2 v2Anonymous hWj4HKIDOFBelum ada peringkat
- Goldstein R J Fluid Mechanics MeasurementsDokumen1 halamanGoldstein R J Fluid Mechanics MeasurementsAnonymous hWj4HKIDOFBelum ada peringkat
- 0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorDokumen5 halaman0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorAnonymous hWj4HKIDOF100% (1)
- 5716159Dokumen34 halaman5716159Anonymous hWj4HKIDOFBelum ada peringkat
- 3241 Lecture 2Dokumen8 halaman3241 Lecture 2Anonymous hWj4HKIDOFBelum ada peringkat
- Chapter 2 - Macromechanical Analysis of A Lamina Exercise SetDokumen12 halamanChapter 2 - Macromechanical Analysis of A Lamina Exercise SetAnonymous hWj4HKIDOFBelum ada peringkat
- Automating Battery Pack Design AA V9 I2Dokumen4 halamanAutomating Battery Pack Design AA V9 I2Anonymous hWj4HKIDOFBelum ada peringkat
- MSC Development Planning and MSC Development Planning Research ScholarshipsDokumen2 halamanMSC Development Planning and MSC Development Planning Research ScholarshipsAnonymous hWj4HKIDOFBelum ada peringkat
- Vehicle Dynamics: Instructor: Ashok Kumar Pandey EmailDokumen6 halamanVehicle Dynamics: Instructor: Ashok Kumar Pandey EmailAnonymous hWj4HKIDOFBelum ada peringkat
- UPM University Petru Major 13 183 PaperDokumen3 halamanUPM University Petru Major 13 183 PaperAnonymous hWj4HKIDOFBelum ada peringkat
- Presentation 1Dokumen4 halamanPresentation 1Anonymous hWj4HKIDOFBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Design of A Windmill For Pumping WaterDokumen73 halamanDesign of A Windmill For Pumping WaterRakheeb BashaBelum ada peringkat
- RP C2843 - Accident 01122012Dokumen2 halamanRP C2843 - Accident 01122012Aeon MarBelum ada peringkat
- N739ef 172N Poh PDFDokumen73 halamanN739ef 172N Poh PDFJuan TapiaBelum ada peringkat
- A Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDokumen17 halamanA Study of The Internal Aerodynamics of The Concorde Inlet: John W. SlaterDpt HtegnBelum ada peringkat
- Commando, Fleetwing BT 12, Douglas A 20 Havoc,: JL Mcclellan: P51 Draft P 1 of 32Dokumen32 halamanCommando, Fleetwing BT 12, Douglas A 20 Havoc,: JL Mcclellan: P51 Draft P 1 of 32Kliment VoroshilovBelum ada peringkat
- Analysis of Different Hybridization Factor of Hybrid Electric Turbojet Engine in Conceptual Aircraft Design PDFDokumen9 halamanAnalysis of Different Hybridization Factor of Hybrid Electric Turbojet Engine in Conceptual Aircraft Design PDFAmritap SandilyaBelum ada peringkat
- Presentation 1Dokumen23 halamanPresentation 1akplanetariumBelum ada peringkat
- Mooney M20TN TKS Ice Protection SystemDokumen28 halamanMooney M20TN TKS Ice Protection SystemScheuermann100% (1)
- SPZ6000 Schematic NewDokumen1 halamanSPZ6000 Schematic Newavrata79Belum ada peringkat
- Electric Flight March 2018Dokumen70 halamanElectric Flight March 2018hexapodo2100% (1)
- A Comparison of The Predicted Mechanical Behavior of Lug Joints Using Strength of Materials Models and Finite Element AnalysisDokumen56 halamanA Comparison of The Predicted Mechanical Behavior of Lug Joints Using Strength of Materials Models and Finite Element AnalysisNaman Dugar100% (1)
- Laboratory Experiment 3: Mohd Ashraf Mohd IsmailDokumen29 halamanLaboratory Experiment 3: Mohd Ashraf Mohd IsmailMohd Ashraf Mohd IsmailBelum ada peringkat
- Adverse YawDokumen5 halamanAdverse YawArun KumarBelum ada peringkat
- Soal UTS Bahasa Inggris Kelas 5 Semester 2Dokumen2 halamanSoal UTS Bahasa Inggris Kelas 5 Semester 2Di Na100% (6)
- APW Airplane MaintenanceDokumen64 halamanAPW Airplane Maintenancenovoair.techservicesBelum ada peringkat
- Is 6594Dokumen17 halamanIs 6594rajmarathiBelum ada peringkat
- Crane Wheel Load EccentricityDokumen2 halamanCrane Wheel Load Eccentricitypranit_rai0% (1)
- Study of Rollover Dynamics of Heavy VehiclesDokumen93 halamanStudy of Rollover Dynamics of Heavy VehiclesImtiazAliShaukatBelum ada peringkat
- Compressible Flow - (Solved Problems) PDFDokumen17 halamanCompressible Flow - (Solved Problems) PDFRimple MaheyBelum ada peringkat
- Ram Air Turbine Test EquipmentDokumen2 halamanRam Air Turbine Test EquipmentfaelimjBelum ada peringkat
- A346qrh PDFDokumen196 halamanA346qrh PDFRayBelum ada peringkat
- QuesTeksFerriumC61C64andC6 PDFDokumen23 halamanQuesTeksFerriumC61C64andC6 PDFEmily MillerBelum ada peringkat
- Overview TurbinDokumen9 halamanOverview TurbinBryan PramadiBelum ada peringkat
- CH 14 - Maintenance Publication Forms and RecordDokumen3 halamanCH 14 - Maintenance Publication Forms and RecordAdil Yehya100% (1)
- Vintage Airplane - Oct 1992Dokumen36 halamanVintage Airplane - Oct 1992Aviation/Space History LibraryBelum ada peringkat
- History of Canadian AirportsDokumen51 halamanHistory of Canadian Airportssyed.imamBelum ada peringkat
- Stratus Es/Esg Pilot'S GuideDokumen12 halamanStratus Es/Esg Pilot'S GuidesandyBelum ada peringkat
- Hale Midship Muscle Pump ManualDokumen302 halamanHale Midship Muscle Pump ManualSA67% (3)
- OK Autrod 5556 (AlMg5Mn)Dokumen1 halamanOK Autrod 5556 (AlMg5Mn)borovniskiBelum ada peringkat
- EC6004 Satellite CommunicationDokumen13 halamanEC6004 Satellite Communicationalenjd8248Belum ada peringkat