Anda mungkin juga menyukai
- Gasolinera PemexDokumen5 halamanGasolinera PemexJoshbagabaga BasurtoBelum ada peringkat
- Resumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeDari EverandResumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeBelum ada peringkat
- Teoriay Problemas RefrigeracionDokumen21 halamanTeoriay Problemas RefrigeracionKeny AnchtBelum ada peringkat
- Reciclaje en SuizaDokumen4 halamanReciclaje en SuizaAnonymous c4w4dbPjSLBelum ada peringkat
- Transformada de Laplace y FourierDokumen18 halamanTransformada de Laplace y FourierKeny AnchtBelum ada peringkat
- Robot Cartesiano Con 3 Grados de LibertadDokumen28 halamanRobot Cartesiano Con 3 Grados de LibertadAntonio MartinezBelum ada peringkat
- Quia de Apoyo Habilidades Socio-Emocionales para La Vida.Dokumen22 halamanQuia de Apoyo Habilidades Socio-Emocionales para La Vida.mayimeg100% (2)
- Robotica Inteligencia ArtificialDokumen14 halamanRobotica Inteligencia Artificialequipo7uft blog100% (1)
- Brazo RoboticoDokumen9 halamanBrazo Roboticorudy condoriBelum ada peringkat
- Ensayo RoboticaDokumen10 halamanEnsayo RoboticaAndres VazquezBelum ada peringkat
- Filosofia de La Historia para La Educacion de La Humanidad (Von Herder Johann Gottfried)Dokumen143 halamanFilosofia de La Historia para La Educacion de La Humanidad (Von Herder Johann Gottfried)reginaldo aliçandro Bordin100% (1)
- Automatizacion de Brazo RoboticoDokumen25 halamanAutomatizacion de Brazo RoboticoDavid MartinezBelum ada peringkat
- Proyecto de Tesis - Brazo RobóticoDokumen17 halamanProyecto de Tesis - Brazo RobóticoVíctor Barreto VásquezBelum ada peringkat
- Robotica Educativa Con LEGODokumen44 halamanRobotica Educativa Con LEGOmanuelsol100% (1)
- Maqmin 23 14 Robótica en MineríaDokumen19 halamanMaqmin 23 14 Robótica en MineríaCRISTIAN ANTONIO PEREZ ATENCIABelum ada peringkat
- Robots Moviles PDFDokumen12 halamanRobots Moviles PDFbestb1iNkBelum ada peringkat
- Chapter IV Robotica de ServicioDokumen40 halamanChapter IV Robotica de ServicioPerez JoseBelum ada peringkat
- Los RobotsDokumen5 halamanLos Robotsnathaly lopezBelum ada peringkat
- Definición de Robot IndustrialDokumen14 halamanDefinición de Robot IndustrialFernando Trejo Huaman100% (1)
- Fundamentos de RoboticaDokumen18 halamanFundamentos de RoboticaJc RzBelum ada peringkat
- RobotsDokumen8 halamanRobotsORLANDO RODRIGUEZBelum ada peringkat
- Clasificacion de Brazos RoboticosDokumen12 halamanClasificacion de Brazos RoboticosRichard Muñoz100% (1)
- Robotica NovenoDokumen3 halamanRobotica NovenoMaria Elena Velssco ChavarroBelum ada peringkat
- 1.7 Tipos y Caracteristicas de RobotsDokumen4 halaman1.7 Tipos y Caracteristicas de RobotsRocha113Belum ada peringkat
- Documento Base RobóticaDokumen35 halamanDocumento Base RobóticaCliffor Jerry Herrera CastrilloBelum ada peringkat
- La Robótica y Sus AplicacionesDokumen4 halamanLa Robótica y Sus AplicacionesElvis Martinez BravoBelum ada peringkat
- Ia, Inteligencia Artificial, Unidad 5.Dokumen46 halamanIa, Inteligencia Artificial, Unidad 5.Neutro Crew SneBelum ada peringkat
- Tarea 4 Cim 2Dokumen17 halamanTarea 4 Cim 2angel_zero0Belum ada peringkat
- RoboticauwuDokumen8 halamanRoboticauwuAnnia Elena Rugama CorralesBelum ada peringkat
- Robot PUMDokumen40 halamanRobot PUMJose LuisBelum ada peringkat
- PDF Taller de Tecnologia Grado 10 DDDokumen3 halamanPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueBelum ada peringkat
- Clasificacion de Los RobotsDokumen4 halamanClasificacion de Los RobotsAA-IPN80% (5)
- Elaboracion de Un Robot Bipedo de Caminado DinamicoDokumen115 halamanElaboracion de Un Robot Bipedo de Caminado DinamicoPedro Palencia100% (1)
- Unidad I. Fundamentos BasicosDokumen28 halamanUnidad I. Fundamentos BasicosDiego NavaBelum ada peringkat
- Robotic ADokumen9 halamanRobotic ADerkis MarcanoBelum ada peringkat
- La Robotica OrgDokumen8 halamanLa Robotica OrgYarely SariasBelum ada peringkat
- Monografia Brazo Robotico 1Dokumen106 halamanMonografia Brazo Robotico 1anon_678365461Belum ada peringkat
- Trabajo de TamaraDokumen5 halamanTrabajo de TamaraDennis Ariel PardoBelum ada peringkat
- F-DC-04 Manual de Prácticas U3-4Dokumen5 halamanF-DC-04 Manual de Prácticas U3-4EnriqueRomeroBelum ada peringkat
- Clasificación de Los Robots - Robotica PunoDokumen6 halamanClasificación de Los Robots - Robotica PunoadrianBelum ada peringkat
- Clasificación Del Brazo RobóticoDokumen7 halamanClasificación Del Brazo RobóticoLenin Ismael Quizhpe CórdovaBelum ada peringkat
- Fernando Saenz NavarroDokumen127 halamanFernando Saenz NavarroMorales FranzuaBelum ada peringkat
- Robotica DanielDokumen12 halamanRobotica DanielDaniel LugoBelum ada peringkat
- Consulta RoboticaDokumen12 halamanConsulta RoboticaDaniel Tirado SánchezBelum ada peringkat
- Historia de La RoboticaDokumen7 halamanHistoria de La RoboticaLeonardo RomoBelum ada peringkat
- Clasificacion de La RoboticaDokumen15 halamanClasificacion de La RoboticaEdwin Eder León DíazBelum ada peringkat
- Clasificación de Robot FANUC Y MITSUBISHIDokumen21 halamanClasificación de Robot FANUC Y MITSUBISHIJulio Gonzales Guevara100% (2)
- S01.s1 - Evolución de La Robótica y Conceptos BásicosDokumen29 halamanS01.s1 - Evolución de La Robótica y Conceptos BásicosJonathanCatariBelum ada peringkat
- Origen de La RoboticaDokumen11 halamanOrigen de La RoboticaXavier RestrepoBelum ada peringkat
- La RoboticaDokumen18 halamanLa RoboticaJose Juniors Ruiz RoblesBelum ada peringkat
- Flores Balderrama Ivan ManuelDokumen12 halamanFlores Balderrama Ivan ManuelBerta BalleyBelum ada peringkat
- Robotica DanielDokumen12 halamanRobotica DanielDaniel LugoBelum ada peringkat
- 5.1 Bobadilla JoséDokumen9 halaman5.1 Bobadilla JoséJosé BobadillaBelum ada peringkat
- Clasificación de Los RobotsDokumen3 halamanClasificación de Los RobotsDavid Camilo MosqueraBelum ada peringkat
- La Robótica en La Actualidad 2Dokumen11 halamanLa Robótica en La Actualidad 2Anaile LMBelum ada peringkat
- Capitulo 1 BrazoDokumen10 halamanCapitulo 1 Brazovicday2005Belum ada peringkat
- 19-EISN-1-026 - Ensayo (Clase 7)Dokumen7 halaman19-EISN-1-026 - Ensayo (Clase 7)David BaezBelum ada peringkat
- Robots de Servicio SMDokumen5 halamanRobots de Servicio SMCris S'Martín Feijóo100% (1)
- Trabajo de Informatica UcatDokumen14 halamanTrabajo de Informatica UcatAndrews CardozoBelum ada peringkat
- Capitulo 1 BrazoDokumen10 halamanCapitulo 1 Brazovicday2005Belum ada peringkat
- Ntroducción A La ObóticaDokumen14 halamanNtroducción A La ObóticaAndrés BaldiviesoBelum ada peringkat
- Lab 01 CabreraDokumen15 halamanLab 01 CabreraLuis Valencia EscarcenaBelum ada peringkat
- Introducción A La RoboticaDokumen28 halamanIntroducción A La RoboticamasanchezcruzBelum ada peringkat
- Tarea RobóticaDokumen3 halamanTarea RobóticayanhishBelum ada peringkat
- Shell Rimula R4 X 15W-40Dokumen3 halamanShell Rimula R4 X 15W-40Keny Ancht100% (1)
- Muelle de Gas Bansbach PDFDokumen28 halamanMuelle de Gas Bansbach PDFKeny AnchtBelum ada peringkat
- Abro Aceite Diesel (&gasolina) 15W-40 Ci-4-Sl PDFDokumen1 halamanAbro Aceite Diesel (&gasolina) 15W-40 Ci-4-Sl PDFKeny AnchtBelum ada peringkat
- Anclaje A Muros de ConcretoDokumen3 halamanAnclaje A Muros de ConcretoKeny AnchtBelum ada peringkat
- Abro Aceite Diesel (&gasolina) 15w-40 Ci-4-SlDokumen1 halamanAbro Aceite Diesel (&gasolina) 15w-40 Ci-4-SlKeny AnchtBelum ada peringkat
- Brazo Excavador CompactoDokumen96 halamanBrazo Excavador CompactoErick VeraBelum ada peringkat
- Modelamiento MatematicoDokumen12 halamanModelamiento MatematicoKeny AnchtBelum ada peringkat
- ECONOMIZADORESDokumen10 halamanECONOMIZADORESKeny AnchtBelum ada peringkat
- Instrucciones de Uso de Productos QuimicosDokumen4 halamanInstrucciones de Uso de Productos QuimicosKeny AnchtBelum ada peringkat
- Expediente #2356-2010 (2da Instancia)Dokumen21 halamanExpediente #2356-2010 (2da Instancia)ErickBelum ada peringkat
- Ensayo Sobre La Tesis y La Investigación CientíficaDokumen5 halamanEnsayo Sobre La Tesis y La Investigación CientíficaElizabeth CollinsBelum ada peringkat
- Programa Preliminar Final VII Congreso de Estudiantes de ArqueologíaDokumen15 halamanPrograma Preliminar Final VII Congreso de Estudiantes de ArqueologíaFenix862Belum ada peringkat
- Resumen Metodo OwasDokumen12 halamanResumen Metodo OwasEmanuel Peña MelendezBelum ada peringkat
- El DerechoDokumen9 halamanEl DerechoBlanyir FarfánBelum ada peringkat
- El Método de La Matriz BCGDokumen3 halamanEl Método de La Matriz BCGBrandon BáezBelum ada peringkat
- Actividad 3 de QuimicaDokumen11 halamanActividad 3 de QuimicaValeria VillalobosBelum ada peringkat
- Escenario 8 Mercadeo PDFDokumen7 halamanEscenario 8 Mercadeo PDFKäro PchönBelum ada peringkat
- 16 Consecuencias de Los Conflictos TerritorialesDokumen6 halaman16 Consecuencias de Los Conflictos TerritorialesMirzam DelgadoBelum ada peringkat
- Calculo Avanzado 5 Ingeniería Industrial t7Dokumen8 halamanCalculo Avanzado 5 Ingeniería Industrial t7Andres PizañaBelum ada peringkat
- Producto Académico N2 1Dokumen4 halamanProducto Académico N2 1jerbBelum ada peringkat
- LibroDokumen208 halamanLibroKarolina OñateBelum ada peringkat
- Curriculo Gir-Actualizado 1Dokumen22 halamanCurriculo Gir-Actualizado 1Jhosep ZpBelum ada peringkat
- Ruta de Aprendizaje y Evaluación Alcantarillados - PracticaDokumen4 halamanRuta de Aprendizaje y Evaluación Alcantarillados - Practicaj_honjcBelum ada peringkat
- ElectroestimulaciónDokumen17 halamanElectroestimulaciónMariana CarreraBelum ada peringkat
- Ejemplo Contestacion Demanda de DivorcioDokumen3 halamanEjemplo Contestacion Demanda de DivorcioErnesto Carlos BerrocalBelum ada peringkat
- E510s-Inverter Catalogue - ES - WebDokumen16 halamanE510s-Inverter Catalogue - ES - WebCarlos Rodrigo CanoBelum ada peringkat
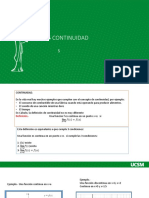
- Clase 4 Continuidadde Una FunciónDokumen16 halamanClase 4 Continuidadde Una FunciónKim MendozaBelum ada peringkat
- Juego Muntref PDFDokumen5 halamanJuego Muntref PDFAlana CanteroBelum ada peringkat
- Guia de Trabajo 1 Aritmética 7ºDokumen13 halamanGuia de Trabajo 1 Aritmética 7ºCarlos PerezBelum ada peringkat
- Las Grandes Transformaciones Del Siglo XIXDokumen3 halamanLas Grandes Transformaciones Del Siglo XIXpipe907Belum ada peringkat
- Monografia Sistema SolarDokumen18 halamanMonografia Sistema SolarMoises Eliud DueñasBelum ada peringkat
- Evidencia 4 Informe Variables Cuantitativas.Dokumen3 halamanEvidencia 4 Informe Variables Cuantitativas.Laura VargasBelum ada peringkat
- BITACORADokumen2 halamanBITACORANicolás MontalvánBelum ada peringkat
- Hablemos de LatriaDokumen7 halamanHablemos de LatriaRafael Sandoval RamirezBelum ada peringkat
- Planificacion de MatematicasDokumen11 halamanPlanificacion de MatematicasjutiapaparaBelum ada peringkat