Anda mungkin juga menyukai
- Distributed Control System ArchitectureDokumen5 halamanDistributed Control System ArchitecturebharathshajiBelum ada peringkat
- Distributed Control Systems: Process Control in The Chemical IndustriesDokumen14 halamanDistributed Control Systems: Process Control in The Chemical IndustriesAhmad HamoudaBelum ada peringkat
- Chapter 4 FinalDokumen11 halamanChapter 4 Finalmuhaba muhamedBelum ada peringkat
- Honeywell Dcs ArchitectureDokumen14 halamanHoneywell Dcs ArchitectureVanama MalaiBelum ada peringkat
- Distributed Control System (DCS) : Information Technology Institute Intake32 - MechatronicsDokumen9 halamanDistributed Control System (DCS) : Information Technology Institute Intake32 - Mechatronicshonesty88Belum ada peringkat
- Distributed Control Systems (DCS)Dokumen13 halamanDistributed Control Systems (DCS)Aparna GirishBelum ada peringkat
- Introduction to Industrial Automation and Control SystemsDokumen59 halamanIntroduction to Industrial Automation and Control SystemsAbdisa BegnaBelum ada peringkat
- PLC vs DCS: Key Differences Between Programmable Logic Controllers and Distributed Control SystemsDokumen4 halamanPLC vs DCS: Key Differences Between Programmable Logic Controllers and Distributed Control SystemsBhavik ShahBelum ada peringkat
- Unit - 3Dokumen44 halamanUnit - 3S ADITYA (RA1911003010347)Belum ada peringkat
- Chap24 422 441Dokumen20 halamanChap24 422 441Arash MazandaraniBelum ada peringkat
- Substation Control and AutomationDokumen20 halamanSubstation Control and AutomationJorge A. Perez YebraBelum ada peringkat
- SCADA PaperDokumen15 halamanSCADA Paperprashantbgpatel1Belum ada peringkat
- Control Industrial Processes Remotely with SCADADokumen6 halamanControl Industrial Processes Remotely with SCADAPaul Allen LegarteBelum ada peringkat
- Control System: Types of Industrial Control SystemsDokumen19 halamanControl System: Types of Industrial Control SystemsAdnan Nawaz100% (2)
- Unit-3 PPT CndcsDokumen83 halamanUnit-3 PPT CndcsgouthamBelum ada peringkat
- CAAS - Common Avionics Architecture SystemDokumen4 halamanCAAS - Common Avionics Architecture SystemKûmãr PrabakaranBelum ada peringkat
- Manan DcsDokumen19 halamanManan Dcsmridulparikh100% (1)
- Distributed Control SystemDokumen31 halamanDistributed Control SystemAbdullah BarkaBelum ada peringkat
- Scada: From Wikipedia, The Free EncyclopediaDokumen10 halamanScada: From Wikipedia, The Free EncyclopediaextremedownloadingsBelum ada peringkat
- Distributed Control System ComponentsDokumen19 halamanDistributed Control System ComponentsCHITYALA YASHWANTH KRISHNA ,ECE18 Vel Tech, ChennaiBelum ada peringkat
- A PROJECT REPORT ON Electronic Voting MachineDokumen97 halamanA PROJECT REPORT ON Electronic Voting Machinereddu143Belum ada peringkat
- Implementation of Home Automation Safety Control Using Programmable Logic ControllerDokumen10 halamanImplementation of Home Automation Safety Control Using Programmable Logic ControllerAnjaneyulu NaikBelum ada peringkat
- Project On Honeywell TDC3000 DcsDokumen77 halamanProject On Honeywell TDC3000 DcsAbv Sai75% (4)
- Distributed Control System OverviewDokumen27 halamanDistributed Control System OverviewChandni Gupta0% (1)
- Transaction Monitoring in Encompass: '1tandemcomputersDokumen28 halamanTransaction Monitoring in Encompass: '1tandemcomputerstuna06Belum ada peringkat
- Systems Concepts: SCADA Is TheDokumen5 halamanSystems Concepts: SCADA Is TheAfrBelum ada peringkat
- Systems Concepts: SCADA Is TheDokumen5 halamanSystems Concepts: SCADA Is TheAfrBelum ada peringkat
- Systems Concepts: SCADA Is TheDokumen5 halamanSystems Concepts: SCADA Is ThePHPBelum ada peringkat
- Systems Concepts: SCADA Is TheDokumen5 halamanSystems Concepts: SCADA Is TheAfrBelum ada peringkat
- SCADADokumen5 halamanSCADAapi-3765150100% (1)
- What Is A Distributed Control System?Dokumen62 halamanWhat Is A Distributed Control System?Kharol A. Bautista100% (1)
- Distributed Control SystemDokumen6 halamanDistributed Control SystemmshahidshaukatBelum ada peringkat
- Introduction to Embedded Systems Unit TwoDokumen19 halamanIntroduction to Embedded Systems Unit TwoAarti DhotreBelum ada peringkat
- Development of A Monitoring and Control Platform For PLC-based ApplicationsDokumen10 halamanDevelopment of A Monitoring and Control Platform For PLC-based ApplicationsyacobaschalewBelum ada peringkat
- Polytechnic University of The Philippines Lopez Quezon, BranchDokumen17 halamanPolytechnic University of The Philippines Lopez Quezon, BranchPatrick Luis CantaraBelum ada peringkat
- New Microsoft Office Word DocumentDokumen7 halamanNew Microsoft Office Word DocumentAnand SurendranBelum ada peringkat
- Assignment 4Dokumen12 halamanAssignment 4SiKandar AKbarBelum ada peringkat
- Eng-Design of Open Architecture Ship-M.S. ZaghloulDokumen18 halamanEng-Design of Open Architecture Ship-M.S. ZaghloulImpact JournalsBelum ada peringkat
- PLC Control SystemsDokumen42 halamanPLC Control Systemspiu_ghosh9966100% (1)
- 5.1 - FMCSDokumen19 halaman5.1 - FMCSJon100% (1)
- Substation Automation Operator SoftwareDokumen9 halamanSubstation Automation Operator SoftwareAlpha AgustinusBelum ada peringkat
- The Multics Inputoutput SystemDokumen10 halamanThe Multics Inputoutput SystemMUHAMMAD FADHLAN HAFIZH MUNTAHABelum ada peringkat
- Instrumentation and ControlDokumen25 halamanInstrumentation and ControlPTk Daryl Cabañero TayongBelum ada peringkat
- DCS. Distributed Control System-1Dokumen43 halamanDCS. Distributed Control System-1Aditia C PurnomoBelum ada peringkat
- Integrated HMI and PLC: The Heart of A "Lean Automation" SolutionDokumen10 halamanIntegrated HMI and PLC: The Heart of A "Lean Automation" Solutionabdulkidwai2009Belum ada peringkat
- Real-Time OS in Home AutomationDokumen8 halamanReal-Time OS in Home AutomationHao QuangBelum ada peringkat
- Iaa Unit 04Dokumen19 halamanIaa Unit 04SurajBelum ada peringkat
- Iaa Unit 04Dokumen19 halamanIaa Unit 04SurajBelum ada peringkat
- Distributed Control SystemDokumen6 halamanDistributed Control Systemsimonliu_68Belum ada peringkat
- Using Labview To Design A Payload Control System: Stephen HoranDokumen10 halamanUsing Labview To Design A Payload Control System: Stephen HoranPradip GuptaBelum ada peringkat
- Communication Between PLC Different Vendors Using OPC Server Improved With Application DeviceDokumen8 halamanCommunication Between PLC Different Vendors Using OPC Server Improved With Application DevicecementsaimBelum ada peringkat
- Prepared By: DR - Ahmed BaalehDokumen14 halamanPrepared By: DR - Ahmed Baalehscribdkhatn100% (1)
- Automatic Irrigation SystemDokumen48 halamanAutomatic Irrigation Systemwww_rsrajashekar900164% (11)
- Road To The Integrated Protective Relaying Fault Information SystemDokumen4 halamanRoad To The Integrated Protective Relaying Fault Information SystemproteccionesBelum ada peringkat
- An Auto-Guided Vehicle Controlled by PC: Index TermsDokumen7 halamanAn Auto-Guided Vehicle Controlled by PC: Index TermsSumith SamaraweeraBelum ada peringkat
- Lecture 2-DCS and PLC Structure, Function and ChractersticsDokumen10 halamanLecture 2-DCS and PLC Structure, Function and ChractersticsAmmar AlkindyBelum ada peringkat
- Establishment of A Control Philosophy For The Pebble Bed Modular Reactor FJE Laubscher, HA GrobbelaarDokumen6 halamanEstablishment of A Control Philosophy For The Pebble Bed Modular Reactor FJE Laubscher, HA GrobbelaarghostamirBelum ada peringkat
- A Concept For Distributed Control Systems: Box 6980, D-7500 KarlsruheDokumen6 halamanA Concept For Distributed Control Systems: Box 6980, D-7500 KarlsruhePriyatham GangapatnamBelum ada peringkat
- 7 Leading Machine Learning Use CasesDokumen11 halaman7 Leading Machine Learning Use CasesUGBelum ada peringkat
- What Are Comorbidities-And How Do They Affect COVID-19Dokumen1 halamanWhat Are Comorbidities-And How Do They Affect COVID-19Tee Shi FengBelum ada peringkat
- Python For Financial Analysis Ebook 2021Dokumen82 halamanPython For Financial Analysis Ebook 2021Tee Shi Feng100% (1)
- Overview of Today's Class: 15.010: Economic Analysis For Business DecisionsDokumen9 halamanOverview of Today's Class: 15.010: Economic Analysis For Business DecisionsHein Thu AungBelum ada peringkat
- DIN 55474 Calculation Moisture Protection ElectronicsDokumen3 halamanDIN 55474 Calculation Moisture Protection ElectronicsTee Shi FengBelum ada peringkat
- DPS O&m Manual 100576Dokumen42 halamanDPS O&m Manual 100576Tee Shi FengBelum ada peringkat
- Main Riser Pull-In Winch: Refernce For CalculationsDokumen1 halamanMain Riser Pull-In Winch: Refernce For CalculationsTee Shi FengBelum ada peringkat
- Power of The Ocean 2 With AfL EnglishDokumen33 halamanPower of The Ocean 2 With AfL EnglishTee Shi FengBelum ada peringkat
- 2020 - Interactive Ecommerce-1 PDFDokumen53 halaman2020 - Interactive Ecommerce-1 PDFTee Shi FengBelum ada peringkat
- Excel 4.0 Macro Functions Reference PDFDokumen653 halamanExcel 4.0 Macro Functions Reference PDFSatyendra SinghBelum ada peringkat
- Steering and Stabilisation Brochure PDFDokumen24 halamanSteering and Stabilisation Brochure PDFhihihiBelum ada peringkat
- L3 Steering Gear PDFDokumen4 halamanL3 Steering Gear PDFTee Shi FengBelum ada peringkat
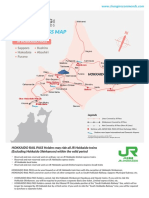
- HokkaidocontentmapDokumen1 halamanHokkaidocontentmapTee Shi FengBelum ada peringkat
- 01 The Web Developer Bootcamp PDFDokumen9 halaman01 The Web Developer Bootcamp PDFEnrique Mejia FlorezBelum ada peringkat
- Japan Vacations Adventures by DisneyDokumen23 halamanJapan Vacations Adventures by DisneyTee Shi FengBelum ada peringkat
- Mcgregor Steering GearDokumen2 halamanMcgregor Steering GearTee Shi FengBelum ada peringkat
- Use of The Dual-Activity Drillship As A Field Development ToolDokumen15 halamanUse of The Dual-Activity Drillship As A Field Development ToolTee Shi FengBelum ada peringkat
- Elegance-Ducted-19 11 19Dokumen2 halamanElegance-Ducted-19 11 19Tee Shi FengBelum ada peringkat
- True vs. Apparent PowerDokumen9 halamanTrue vs. Apparent PowerAnonymous 9feJpOwBelum ada peringkat
- TLP Rigid Riser Case StudyDokumen6 halamanTLP Rigid Riser Case StudyTee Shi FengBelum ada peringkat
- TLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFDokumen7 halamanTLP Hull - Tendon - Riser Coupled Dynamic Analysis in Deepwater PDFZylyn KuaBelum ada peringkat
- Hazop Surface Gas and Mud Handling Systems During Drilling OperationsDokumen14 halamanHazop Surface Gas and Mud Handling Systems During Drilling OperationsTee Shi FengBelum ada peringkat
- Time-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsDokumen8 halamanTime-Domain Coupled Analysis of Deepwater TLP, and Verification Against Model TestsTee Shi FengBelum ada peringkat
- TLP Global Motion Performance Analysis ProceduresDokumen8 halamanTLP Global Motion Performance Analysis ProceduresTee Shi FengBelum ada peringkat
- Integrated Global Performance Analysis of Matterhorn SeaStar TLPDokumen11 halamanIntegrated Global Performance Analysis of Matterhorn SeaStar TLPTee Shi FengBelum ada peringkat
- Matterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPDokumen16 halamanMatterhorn Steel Catenary Risers Critical Issues and Lessons Learned For Reel-Layed SCRs To A TLPTee Shi FengBelum ada peringkat
- Surge Motion of Mini TLP in Random Seas - Comparison Between Experiment and TheoryDokumen8 halamanSurge Motion of Mini TLP in Random Seas - Comparison Between Experiment and TheoryTee Shi FengBelum ada peringkat
- Prediction of TLP Responses Model Tests Vs AnalysisDokumen16 halamanPrediction of TLP Responses Model Tests Vs AnalysisTee Shi FengBelum ada peringkat
- Impact of Coupled Analysis On Global Performance of Deep Water Tlp'sDokumen14 halamanImpact of Coupled Analysis On Global Performance of Deep Water Tlp'sTee Shi FengBelum ada peringkat
- Designing Hexagonal Architecture With Java - Build Maintainable and Long-Lasting Applications With Java & Quarkus - 2e - 2023Dokumen438 halamanDesigning Hexagonal Architecture With Java - Build Maintainable and Long-Lasting Applications With Java & Quarkus - 2e - 2023Milan100% (1)
- 8x8 LED Matrix Using ArduinoDokumen4 halaman8x8 LED Matrix Using ArduinoCasey YeohBelum ada peringkat
- Chapter 1 1Dokumen45 halamanChapter 1 1Bab KebedeBelum ada peringkat
- Class 12 Computer Science Project PythonDokumen32 halamanClass 12 Computer Science Project PythonPrakhar P.74% (80)
- OOP Advantages & DisadvantagesDokumen2 halamanOOP Advantages & DisadvantagesanruagBelum ada peringkat
- Standard BAS Module (VB6)Dokumen3 halamanStandard BAS Module (VB6)TaiwoBelum ada peringkat
- STM Notes Unit1Dokumen61 halamanSTM Notes Unit1vijaykannamalla100% (1)
- Input and Output ConstructsDokumen10 halamanInput and Output ConstructsUma RomanBelum ada peringkat
- Tessy Tutorial: Component / Integration Testing With TessyDokumen41 halamanTessy Tutorial: Component / Integration Testing With TessyTagore DrntBelum ada peringkat
- DIT or Dev Environment - Mangesh SirDokumen4 halamanDIT or Dev Environment - Mangesh SirAkshay KhotBelum ada peringkat
- Software Engineering - 2023 - Assignment 5Dokumen5 halamanSoftware Engineering - 2023 - Assignment 5Liya WilsonBelum ada peringkat
- GS33J10D24 01enDokumen2 halamanGS33J10D24 01enkjh346gmail.comBelum ada peringkat
- Fitness Center 1 Cs Practical For Class 12Dokumen13 halamanFitness Center 1 Cs Practical For Class 12aeeeelvishbhaiiBelum ada peringkat
- Welcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)Dokumen19 halamanWelcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)SURESH SBelum ada peringkat
- Software Design Basics Chapter - Modularization and CohesionDokumen11 halamanSoftware Design Basics Chapter - Modularization and CohesionJasonDelumenBelum ada peringkat
- Mycsguide - Blogspot.In: Chapter - 5 General Oop ConceptsDokumen6 halamanMycsguide - Blogspot.In: Chapter - 5 General Oop ConceptsYash PradhanBelum ada peringkat
- Automation Feasibility Analysis: Vinoth Rathinam TutorialsDokumen21 halamanAutomation Feasibility Analysis: Vinoth Rathinam TutorialsvinothrwinsBelum ada peringkat
- High Level HLD GuidelinesDokumen9 halamanHigh Level HLD GuidelinesshankargodhaBelum ada peringkat
- Structured Programming TechniquesDokumen30 halamanStructured Programming TechniquesKc MamaBelum ada peringkat
- Module ECM1410 (2020) Object-Oriented ProgrammingDokumen2 halamanModule ECM1410 (2020) Object-Oriented ProgrammingcrisasheBelum ada peringkat
- FEDEASLab Presentation PDFDokumen51 halamanFEDEASLab Presentation PDFAsim BashirBelum ada peringkat
- Journal Pre-Proof: Information and Software TechnologyDokumen33 halamanJournal Pre-Proof: Information and Software TechnologyIntan FauziyahBelum ada peringkat
- Apparel Software Suite Manages Entire Production ProcessDokumen12 halamanApparel Software Suite Manages Entire Production ProcessartadecorativaBelum ada peringkat
- Technogeeks Data Science CourseDokumen33 halamanTechnogeeks Data Science Courseanjalitech007Belum ada peringkat
- AlvDokumen39 halamanAlvsankhamitra77Belum ada peringkat
- Banking On ATM Card SoftwareDokumen114 halamanBanking On ATM Card SoftwareDivya SmileBelum ada peringkat
- Barcode Label Scale Software Quickstart GuideDokumen74 halamanBarcode Label Scale Software Quickstart Guidekianblm672Belum ada peringkat
- ODLI20161010 - 035-UPD-es - AR-FastFlex-LED-module 2x8 - 740-Gen-Ficha-TécnicaDokumen11 halamanODLI20161010 - 035-UPD-es - AR-FastFlex-LED-module 2x8 - 740-Gen-Ficha-TécnicamyryqBelum ada peringkat
- 62) Sports Event Management SystemDokumen26 halaman62) Sports Event Management SystemTunnu SunnyBelum ada peringkat
- Faq Mapinfo MB60UGDokumen285 halamanFaq Mapinfo MB60UGВиталий ФоменкоBelum ada peringkat