Anda mungkin juga menyukai
- A Short Report On Different Wavelets and Their StructuresDokumen5 halamanA Short Report On Different Wavelets and Their StructuresInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Exploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteDokumen5 halamanExploratory Study On The Use of Crushed Cockle Shell As Partial Sand Replacement in ConcreteInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Dynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorDokumen5 halamanDynamic Modeling For Gas Phase Propylene Copolymerization in A Fluidized Bed ReactorInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Review: Nonlinear Techniques For Analysis of Heart Rate VariabilityDokumen16 halamanReview: Nonlinear Techniques For Analysis of Heart Rate VariabilityInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Study and Evaluation For Different Types of Sudanese Crude Oil PropertiesDokumen4 halamanStudy and Evaluation For Different Types of Sudanese Crude Oil PropertiesInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Congenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaDokumen6 halamanCongenital Malaria: Correlation of Umbilical Cord Plasmodium falciparum Parasitemia with Maternal Peripheral Blood Plasmodium falciparum Parasitemia in selected Hospitals in Jimeta Yola, Adamawa State, NigeriaInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Experimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsDokumen5 halamanExperimental Study On Critical Closing Pressure of Mudstone Fractured ReservoirsInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- An Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningDokumen8 halamanAn Improved Fading Kalman Filter in The Application of BDS Dynamic PositioningInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- A Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingDokumen9 halamanA Case Study On Academic Services Application Using Agile Methodology For Mobile Cloud ComputingInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- DDOS Attacks-A Stealthy Way of Implementation and DetectionDokumen6 halamanDDOS Attacks-A Stealthy Way of Implementation and DetectionInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Design of The Floating-Type Memristor Emulator and Its Circuit ImplementationDokumen7 halamanDesign of The Floating-Type Memristor Emulator and Its Circuit ImplementationInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- The Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortDokumen6 halamanThe Low-Temperature Radiant Floor Heating System Design and Experimental Study On Its Thermal ComfortInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- A Fast and Effective Impulse Noise FilterDokumen6 halamanA Fast and Effective Impulse Noise FilterInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Reduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsDokumen10 halamanReduce Resources For Privacy in Mobile Cloud Computing Using Blowfish and DSA AlgorithmsInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Correlation Analysis of Tool Wear and Cutting Sound SignalDokumen5 halamanCorrelation Analysis of Tool Wear and Cutting Sound SignalInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Thesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionDokumen6 halamanThesummaryabout Fuzzy Control Parameters Selected Based On Brake Driver Intention RecognitionInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Structural Aspect On Carbon Dioxide Capture in NanotubesDokumen9 halamanStructural Aspect On Carbon Dioxide Capture in NanotubesInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- A Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpDokumen6 halamanA Novel High-Precision Curvature-Compensated CMOS Bandgap Reference Without Using An Op-AmpInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- I Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceDokumen3 halamanI Extension of Some Common Fixed Point Theorems Using Compatible Mappings in Fuzzy Metric SpaceInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Synergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesDokumen8 halamanSynergistic Effect of Halide Ions On The Corrosion Inhibition of Mild Steel in Sulphuric Acid Using Alkyl Substituted Piperidi-4 - One ThiosemicarbazonesInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- An Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureDokumen4 halamanAn Understanding of The Electronic Bipolar Resistance Switching Behavior in Cu/TiO2/ITO StructureInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Resistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerDokumen4 halamanResistance of Dryland Rice To Stem Borer (Scirpophaga Incertulas WLK.) Using Organic FertilizerInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- BIM Based Organizational LearningDokumen9 halamanBIM Based Organizational LearningInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- A Mathematical Programming Approach For Selection of Variables in Cluster AnalysisDokumen9 halamanA Mathematical Programming Approach For Selection of Variables in Cluster AnalysisInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Performance Measurement of Digital Modulation Schemes Using FPGADokumen6 halamanPerformance Measurement of Digital Modulation Schemes Using FPGAInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- The Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSDokumen7 halamanThe Simulation Research of The Reamer of The Cutter Suction Dredger Based On ADAMSInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- Performance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationDokumen6 halamanPerformance Analysis of Massive MIMO Downlink System With Imperfect Channel State InformationInternational Journal of Research in Engineering and ScienceBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Model Building Intermediate: Exercise GuideDokumen64 halamanModel Building Intermediate: Exercise GuideDragos ZvincuBelum ada peringkat
- Emd-Mi928 Sistema de LubricacionDokumen6 halamanEmd-Mi928 Sistema de LubricacionVictor Raul Tobosque Muñoz100% (1)
- Trane VAV Equipment SpecificationsDokumen52 halamanTrane VAV Equipment Specificationsyu4212Belum ada peringkat
- Fireplace ManualDokumen40 halamanFireplace Manualresistancebeta6Belum ada peringkat
- MagnetostictiveDokumen17 halamanMagnetostictivekanikasharma22Belum ada peringkat
- Classiffication of ComputerDokumen15 halamanClassiffication of Computervenkat sai bharatBelum ada peringkat
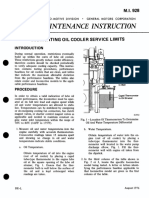
- 651Dokumen26 halaman651riskraj1984Belum ada peringkat
- HartfordDokumen7 halamanHartfordapi-443631703Belum ada peringkat
- KampasDokumen1 halamanKampasSamer aneBelum ada peringkat
- BTW-ST300MW Pure Sine Wave Inverter ManualDokumen15 halamanBTW-ST300MW Pure Sine Wave Inverter ManualCarlos ZubietaBelum ada peringkat
- Work OverDokumen3 halamanWork OverDaniil GhilescuBelum ada peringkat
- Calculating The Pathlength of Liquid Cells by FTIR PIKEDokumen1 halamanCalculating The Pathlength of Liquid Cells by FTIR PIKEMoises RomeroBelum ada peringkat
- HILTI Typical Plumbing ApplicationsDokumen140 halamanHILTI Typical Plumbing ApplicationskuraimundBelum ada peringkat
- QCDD-Duyar-QR SprinklersDokumen2 halamanQCDD-Duyar-QR SprinklersBaraa' KahlawiBelum ada peringkat
- Grade 2 SasmoDokumen8 halamanGrade 2 SasmoThích Toán HọcBelum ada peringkat
- 90 61 085 Transportation ValvesDokumen18 halaman90 61 085 Transportation ValvesarrikanBelum ada peringkat
- NTS - Math Notes & Mcqs Solved Grade 8thDokumen10 halamanNTS - Math Notes & Mcqs Solved Grade 8thZahid KumailBelum ada peringkat
- Company Profile Metro GoldrichDokumen29 halamanCompany Profile Metro GoldrichBids and Awards CommitteeBelum ada peringkat
- Alejandra PDFDokumen1 halamanAlejandra PDFCristian Melendres OrellanaBelum ada peringkat
- Predictive Analytics in Warranty ClaimsDokumen6 halamanPredictive Analytics in Warranty ClaimsRaj SharmaBelum ada peringkat
- Detailed Lesson Log in MathematicsDokumen7 halamanDetailed Lesson Log in MathematicsChan Chan100% (1)
- TM 9-792 M21 AMMUNITION TRAILERDokumen128 halamanTM 9-792 M21 AMMUNITION TRAILERAdvocate100% (1)
- 2SK3377Dokumen5 halaman2SK3377Jheremy Sebastian TorresBelum ada peringkat
- Municipality of AloguinsanDokumen5 halamanMunicipality of AloguinsanLady Mae BrigoliBelum ada peringkat
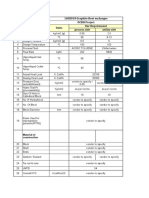
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDokumen2 halaman16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaBelum ada peringkat
- Software: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsDokumen8 halamanSoftware: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsBrandi DaleBelum ada peringkat
- Fuel & Ignition System Engine VolvoDokumen1 halamanFuel & Ignition System Engine VolvoImran MehboobBelum ada peringkat
- Specification For Foamed Concrete: by K C Brady, G R A Watts and Ivi R JonesDokumen20 halamanSpecification For Foamed Concrete: by K C Brady, G R A Watts and Ivi R JonesMaria Aiza Maniwang Calumba100% (1)
- UbnfilelDokumen3 halamanUbnfilelJorge LorenzoBelum ada peringkat
- Factors Affecting Beam StrengthDokumen2 halamanFactors Affecting Beam StrengthkalpanaadhiBelum ada peringkat