Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Programmable Logic Devices ReportDokumen7 halamanProgrammable Logic Devices ReportRoemil CabalBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- EV-100ZX Motor Controller Description & RepairDokumen95 halamanEV-100ZX Motor Controller Description & RepairMario Aguirre100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- DUCATI Bikes DumptoolsDokumen12 halamanDUCATI Bikes DumptoolsOleh PoBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- ds250df230 PDFDokumen105 halamands250df230 PDFherbertmgBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- CG RomDokumen14 halamanCG RomvijaysatawBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- CP2102 9 PDFDokumen26 halamanCP2102 9 PDFdeepak_singla227Belum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hgsemi-At24c02m-Tr C356696 PDFDokumen13 halamanHgsemi-At24c02m-Tr C356696 PDFfiras sonomiBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Nextion Instruction Set - ITEAD WikiDokumen28 halamanNextion Instruction Set - ITEAD WikiErdem Koklu100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- 1991 16 Bit V-Series Microprocessor Data BookDokumen1.107 halaman1991 16 Bit V-Series Microprocessor Data BookJean GrégoireBelum ada peringkat
- Microcomputer SystemDokumen6 halamanMicrocomputer SystemrohitBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Final ES PDFDokumen176 halamanFinal ES PDFFarida ShaikBelum ada peringkat
- Unit 2Dokumen48 halamanUnit 2bharathimmkBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Key Maker For EWS (ENG)Dokumen16 halamanKey Maker For EWS (ENG)BOBMALIK100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Atmel Form 10-KDokumen123 halamanAtmel Form 10-KmiketaasBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- CAT22C10: 256-Bit Nonvolatile CMOS Static RAMDokumen10 halamanCAT22C10: 256-Bit Nonvolatile CMOS Static RAMvanmarteBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- A Seminar ReportDokumen33 halamanA Seminar ReportSalmaMubarakJ100% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- System Unit ComponentsDokumen53 halamanSystem Unit Componentsk3lvynBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Atmel 8766 Seeprom At24cs04 08 Datasheet ATMLH236Dokumen23 halamanAtmel 8766 Seeprom At24cs04 08 Datasheet ATMLH236berrumeBelum ada peringkat
- L24C32Dokumen14 halamanL24C32mpapamicBelum ada peringkat
- IP SolutionsDokumen10 halamanIP Solutions5961bhavyapatel79Belum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Differences between RAM and ROMDokumen4 halamanDifferences between RAM and ROMA. JadoonBelum ada peringkat
- 24C08 AtmelDokumen19 halaman24C08 AtmelCarlos Daniel Nery de OliveiraBelum ada peringkat
- Manual Hardware FanucDokumen445 halamanManual Hardware Fanuced_guaitolini2161100% (2)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Isl 94202Dokumen89 halamanIsl 94202Aura SantiagoBelum ada peringkat
- ChipMax ManualDokumen68 halamanChipMax ManualRaul E. Soli0% (1)
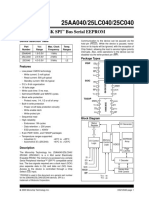
- 25AA040/25LC040/25C040: 4K Spi Bus Serial EEPROMDokumen22 halaman25AA040/25LC040/25C040: 4K Spi Bus Serial EEPROMAgustin AndrokaitesBelum ada peringkat
- Chapter 12Dokumen107 halamanChapter 12shivani1401Belum ada peringkat
- A PIC Microcontroller IntroductionDokumen10 halamanA PIC Microcontroller IntroductionMoorthy Manikandan100% (4)
- Microwind 3.5 BR PDFDokumen2 halamanMicrowind 3.5 BR PDFJAGANNATHAN SBelum ada peringkat
- MOSFET Chapter - 6Dokumen51 halamanMOSFET Chapter - 6田佳生Belum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)