Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- SHD Internal Mount Installation Using RNR Tube HeadDokumen1 halamanSHD Internal Mount Installation Using RNR Tube HeadBilly ChrisBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- ADAMS TrainingDokumen332 halamanADAMS Trainingsunil481Belum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
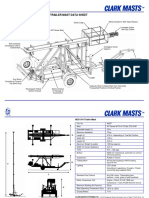
- Model 802/15-6 Standard Duty Trailer Mast Data SheetDokumen2 halamanModel 802/15-6 Standard Duty Trailer Mast Data SheetBilly ChrisBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Document Downloaded From:: Cc-By-Nc-Nd, (C) Elsevier, 2018Dokumen38 halamanDocument Downloaded From:: Cc-By-Nc-Nd, (C) Elsevier, 2018Billy ChrisBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Modernisation Commitment and ContinuityDokumen2 halamanModernisation Commitment and ContinuityBilly ChrisBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Telescopic Mast Operators Manual: Issue 1 1Dokumen19 halamanTelescopic Mast Operators Manual: Issue 1 1Billy ChrisBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Heavy Duty Locking Mast Installation DimensionsDokumen2 halamanHeavy Duty Locking Mast Installation DimensionsBilly ChrisBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Se Downloads Baby Infant Food Processing Lines DataDokumen4 halamanSe Downloads Baby Infant Food Processing Lines DataBilly ChrisBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Mast Installation - Internal MountingDokumen2 halamanMast Installation - Internal MountingBilly ChrisBelum ada peringkat
- Bouzid ADokumen127 halamanBouzid ABilly ChrisBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Lubricating Your Pneumatic MastDokumen2 halamanLubricating Your Pneumatic MastBilly ChrisBelum ada peringkat
- Pressure Surges and Air Valve Specification PDFDokumen22 halamanPressure Surges and Air Valve Specification PDFTONBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Design of Pneumatic Cylinders: MGA ControlsDokumen1 halamanDesign of Pneumatic Cylinders: MGA ControlsBilly ChrisBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Adams Solver GuideDokumen111 halamanAdams Solver GuideAvk SanjeevanBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
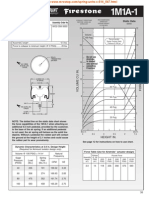
- Firestone Air Spring W02 358 3003Dokumen29 halamanFirestone Air Spring W02 358 3003Billy ChrisBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Recce Vehicle Rev B-FINAL Tcm26-18143Dokumen20 halamanRecce Vehicle Rev B-FINAL Tcm26-18143Billy ChrisBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Computer Simulation of Cumulative Fatigue Damage: Facta UniversitatisDokumen9 halamanComputer Simulation of Cumulative Fatigue Damage: Facta UniversitatisBilly ChrisBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- MATLAB TutorialDokumen18 halamanMATLAB TutorialAmmar RayyanBelum ada peringkat
- Tire Road ModelsDokumen54 halamanTire Road ModelsBilly ChrisBelum ada peringkat
- FSAE Damper Guide - Jim Kasprzak Kaz Tech TipDokumen25 halamanFSAE Damper Guide - Jim Kasprzak Kaz Tech TipAlex BradleyBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Firestone Air Spring W02 358 3003Dokumen29 halamanFirestone Air Spring W02 358 3003Billy ChrisBelum ada peringkat
- Air Suspension Bellows and Shock Absorbers PDFDokumen248 halamanAir Suspension Bellows and Shock Absorbers PDFBilly ChrisBelum ada peringkat
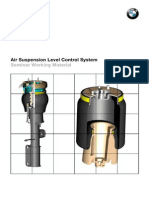
- E39 - E53 - E65 Air Suspension Level Control System PDFDokumen52 halamanE39 - E53 - E65 Air Suspension Level Control System PDFBilly ChrisBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- LBU R AirSuspensionMCVehiclesSt2 PDFDokumen107 halamanLBU R AirSuspensionMCVehiclesSt2 PDFBilly ChrisBelum ada peringkat
- Watershed Management A Case Study of Madgyal Village IJERTV2IS70558Dokumen5 halamanWatershed Management A Case Study of Madgyal Village IJERTV2IS70558SharadBelum ada peringkat
- NAVMC 3500.35A (Food Services)Dokumen88 halamanNAVMC 3500.35A (Food Services)Alexander HawkBelum ada peringkat
- English Class Language DevicesDokumen56 halamanEnglish Class Language DevicesKAREN GREGANDABelum ada peringkat
- Instruction Manual For National Security Threat Map UsersDokumen16 halamanInstruction Manual For National Security Threat Map UsersJan KastorBelum ada peringkat
- HAU Theology 103 Group Goal Commitment ReportDokumen6 halamanHAU Theology 103 Group Goal Commitment ReportEM SagunBelum ada peringkat
- The Effect of Reward Practices on Employee Performance in Ethio TelecomDokumen29 halamanThe Effect of Reward Practices on Employee Performance in Ethio TelecomZakki Hersi AbdiBelum ada peringkat
- COS1512 202 - 2015 - 1 - BDokumen33 halamanCOS1512 202 - 2015 - 1 - BLina Slabbert-van Der Walt100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- A Method For Identifying Human Factors Concerns During The HAZOP Process - Dennis AttwoodDokumen5 halamanA Method For Identifying Human Factors Concerns During The HAZOP Process - Dennis AttwoodAlvaro Andres Blanco GomezBelum ada peringkat
- LMA Guide to London Market ProcessingDokumen65 halamanLMA Guide to London Market ProcessingNanthawat Babybeb100% (1)
- Tiger Facts: Physical Characteristics of the Largest CatDokumen14 halamanTiger Facts: Physical Characteristics of the Largest CatNagina ChawlaBelum ada peringkat
- Introduction to Corporate Communication ObjectivesDokumen26 halamanIntroduction to Corporate Communication ObjectivesKali MuthuBelum ada peringkat
- Appointment Letter JobDokumen30 halamanAppointment Letter JobsalmanBelum ada peringkat
- WP 2 Final Draft 1Dokumen5 halamanWP 2 Final Draft 1api-457082236Belum ada peringkat
- Tabelas Normativas DinDokumen2 halamanTabelas Normativas DinDeimos PhobosBelum ada peringkat
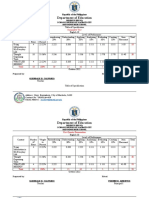
- Table of Specification ENGLISHDokumen2 halamanTable of Specification ENGLISHDonn Abel Aguilar IsturisBelum ada peringkat
- Research ProposalDokumen2 halamanResearch ProposalHo Manh LinhBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Date ValidationDokumen9 halamanDate ValidationAnonymous 9B0VdTWiBelum ada peringkat
- Learn Six Sigma Process and Methodology BasicsDokumen4 halamanLearn Six Sigma Process and Methodology BasicsGeorge MarkasBelum ada peringkat
- Inner WordDokumen7 halamanInner WordMico SavicBelum ada peringkat
- 1 PDFDokumen14 halaman1 PDFPM JFBelum ada peringkat
- Malla Reddy Engineering College (Autonomous)Dokumen17 halamanMalla Reddy Engineering College (Autonomous)Ranjith KumarBelum ada peringkat
- Liberal Theory: Key Aspects of Idealism in International RelationsDokumen11 halamanLiberal Theory: Key Aspects of Idealism in International RelationsArpit JainBelum ada peringkat
- 2-Eagan Model of CounsellingDokumen23 halaman2-Eagan Model of CounsellingVijesh V Kumar100% (4)
- Subject and Power - FoucaultDokumen10 halamanSubject and Power - FoucaultEduardo EspíndolaBelum ada peringkat
- 7 JitDokumen36 halaman7 JitFatima AsadBelum ada peringkat
- Bluehill BrochureDokumen24 halamanBluehill BrochureGeorge SingerBelum ada peringkat
- Getting BetterDokumen3 halamanGetting BetterIngrid MedinaBelum ada peringkat
- Risk Assessment For Modification of Phase 1 Existing Building GPR TankDokumen15 halamanRisk Assessment For Modification of Phase 1 Existing Building GPR TankAnandu Ashokan100% (1)
- Reich Web ADokumen34 halamanReich Web Ak1nj3Belum ada peringkat
- حقيبة تعليمية لمادة التحليلات الهندسية والعدديةDokumen28 halamanحقيبة تعليمية لمادة التحليلات الهندسية والعدديةAnjam RasulBelum ada peringkat
- A-level Maths Revision: Cheeky Revision ShortcutsDari EverandA-level Maths Revision: Cheeky Revision ShortcutsPenilaian: 3.5 dari 5 bintang3.5/5 (8)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDari EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormPenilaian: 5 dari 5 bintang5/5 (5)
- Pre-Calculus Workbook For DummiesDari EverandPre-Calculus Workbook For DummiesPenilaian: 4.5 dari 5 bintang4.5/5 (2)