Anda mungkin juga menyukai
- 2018+ Ford Focus 1L - Wiring DiagramsDokumen602 halaman2018+ Ford Focus 1L - Wiring DiagramsHưng TrầnBelum ada peringkat
- ME199 DynoReport RHartDokumen29 halamanME199 DynoReport RHartmoridin2002Belum ada peringkat
- Drag of A Disk Rotating in A Viscous FluidDokumen50 halamanDrag of A Disk Rotating in A Viscous FluidBaptiste RéaudBelum ada peringkat
- ANSYS Motor-CAD Installation InstructionsDokumen19 halamanANSYS Motor-CAD Installation InstructionsSaurabh WanganekarBelum ada peringkat
- Isolation Transformers Reduce Drive Neutral Point VoltageDokumen5 halamanIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111Belum ada peringkat
- Vane Pump Modeling in FLUENTDokumen32 halamanVane Pump Modeling in FLUENTMohamed Osman AbdallaBelum ada peringkat
- Wheelhub Integration of Electric Motor in FSEDokumen35 halamanWheelhub Integration of Electric Motor in FSEShivam WankhedeBelum ada peringkat
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesDari EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesBelum ada peringkat
- Yonah CPU Schematic Block DiagramDokumen45 halamanYonah CPU Schematic Block DiagramWilgen GarciaBelum ada peringkat
- Fault level calculation using base MVA methodDokumen2 halamanFault level calculation using base MVA methodTreesa Archnana100% (3)
- PHY Interface For The PCI Express Architecture: ©2003 Intel Corporation-All Rights ReservedDokumen31 halamanPHY Interface For The PCI Express Architecture: ©2003 Intel Corporation-All Rights ReservedmukpandaBelum ada peringkat
- Introduction DynamometerDokumen5 halamanIntroduction DynamometerJohn Paul CabreraBelum ada peringkat
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityDari EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityBelum ada peringkat
- Eddy Current Dynamometer SystemDokumen19 halamanEddy Current Dynamometer SystemtantibaBelum ada peringkat
- Comp. Variable Compression Ratio Scfsde With Eddy Current DynamometerDokumen25 halamanComp. Variable Compression Ratio Scfsde With Eddy Current DynamometerFrank GandhiBelum ada peringkat
- Torque and Power Measurement SecondDokumen11 halamanTorque and Power Measurement SecondShukor Az100% (1)
- Hydraulic Dynamometer DTDokumen46 halamanHydraulic Dynamometer DTAnonymous alQXB11EgQ100% (2)
- Water Brake Absorbing DynamometerDokumen1 halamanWater Brake Absorbing DynamometerShah Fahad Khan100% (1)
- Dynamometer SpecificationDokumen4 halamanDynamometer SpecificationupenderBelum ada peringkat
- Axial PErmanent MAgnetDokumen6 halamanAxial PErmanent MAgnetSatyam Swarup100% (1)
- KorfundDokumen68 halamanKorfundnhy.mail2709100% (1)
- Automatic Transmission Fluid Flywheel and Torque ConverterDokumen14 halamanAutomatic Transmission Fluid Flywheel and Torque ConverterERISON FARIBelum ada peringkat
- Noble Corporation: Noble Analyst Day Singapore May 17-18, 2011Dokumen27 halamanNoble Corporation: Noble Analyst Day Singapore May 17-18, 2011Andi ayuBelum ada peringkat
- Magnetic Induction and ResonanceDokumen16 halamanMagnetic Induction and ResonanceKim Won Kuk100% (1)
- Engine Performance Optimization - GT PowerDokumen2 halamanEngine Performance Optimization - GT Powermanoj262400/2Belum ada peringkat
- Engine Testing TechniqueDokumen8 halamanEngine Testing TechniqueNur YakhinBelum ada peringkat
- Cooling of Motor Cyclist HelmetDokumen27 halamanCooling of Motor Cyclist HelmetRajashekara Murthy100% (1)
- Treo Treo Yaari Charging Cable ChangedDokumen2 halamanTreo Treo Yaari Charging Cable ChangedCotech2 KNRBelum ada peringkat
- Types and Applications of Traction MotorsDokumen8 halamanTypes and Applications of Traction MotorsShrestha Sanju100% (1)
- Instructions de SécuritéDokumen106 halamanInstructions de SécuritéMonjolBelum ada peringkat
- 3 3 1 Optical Applications With CST MICROWAVE STUDIODokumen36 halaman3 3 1 Optical Applications With CST MICROWAVE STUDIOmsajjad_68Belum ada peringkat
- Traction Motor DesignDokumen11 halamanTraction Motor DesignS.m. FerdousBelum ada peringkat
- Engine Technology International April2011Dokumen96 halamanEngine Technology International April2011raman87250Belum ada peringkat
- SF 602 ManualDokumen543 halamanSF 602 ManualWayde Lyon100% (1)
- FEN1021v002 DynPro 4.0 Advanced Printing User GuideDokumen40 halamanFEN1021v002 DynPro 4.0 Advanced Printing User GuideFerry AldyBelum ada peringkat
- Heat Collector Element Energy Balance EquationsDokumen10 halamanHeat Collector Element Energy Balance EquationsTamoor AliBelum ada peringkat
- Coastdown Chassis Dynamometer Testing EventsDokumen11 halamanCoastdown Chassis Dynamometer Testing EventsLuccas FornasariBelum ada peringkat
- Acceptance Conditions and Acceptance TestsDokumen32 halamanAcceptance Conditions and Acceptance TestsManoj SinghBelum ada peringkat
- Pic16f72 3 Phase Motor ControlDokumen18 halamanPic16f72 3 Phase Motor ControlMatias BerriosBelum ada peringkat
- Example 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and ADokumen3 halamanExample 3: A 7.5-hp 120-V Series DC Motor Has An Armature Resistance of 0.2 Ohm and Ahakkı_aBelum ada peringkat
- Info Standard EquipmentDokumen3 halamanInfo Standard Equipmentapi-124143015Belum ada peringkat
- Controller - PM866Dokumen4 halamanController - PM866DIEGO FELIPE VEGABelum ada peringkat
- HGA CatDokumen31 halamanHGA CatPetroMan CMBelum ada peringkat
- 2.review of Literature and Statement of ProblemDokumen6 halaman2.review of Literature and Statement of ProblemsheriabhiBelum ada peringkat
- Cruise Control of Bruhless DC MotorDokumen12 halamanCruise Control of Bruhless DC MotorVishal PhadtareBelum ada peringkat
- CEAS Engine Data Report 6G80ME-C10.6 HL: Point Power Speed MEPDokumen11 halamanCEAS Engine Data Report 6G80ME-C10.6 HL: Point Power Speed MEPMiriam PedersenBelum ada peringkat
- Diesel Engines Class NotesDokumen15 halamanDiesel Engines Class NotesNandakumar BasavarajBelum ada peringkat
- HPED Assignment 2: DC DrivesDokumen4 halamanHPED Assignment 2: DC DrivesShadBelum ada peringkat
- Gep 974GDokumen43 halamanGep 974GalbrodzBelum ada peringkat
- Treadmill 95T-DOMLX-DOMHX-INTHX-01 - Service - Manual - M051 - 00K65-A003Dokumen94 halamanTreadmill 95T-DOMLX-DOMHX-INTHX-01 - Service - Manual - M051 - 00K65-A003powerliftermiloBelum ada peringkat
- 10 - Bubenzer Bremsen SB28-E5Dokumen29 halaman10 - Bubenzer Bremsen SB28-E5Ing FermínBelum ada peringkat
- IGS NT Troubleshooting Guide 01 2019Dokumen44 halamanIGS NT Troubleshooting Guide 01 2019DumebiBelum ada peringkat
- Electrical MotorDokumen30 halamanElectrical Motordayat_ridersBelum ada peringkat
- DynamometerDokumen7 halamanDynamometerGaurav S PatilBelum ada peringkat
- A V228 StationaryDokumen4 halamanA V228 StationaryMike FinazziBelum ada peringkat
- AM-SC1 FileDokumen2 halamanAM-SC1 Filesrit218100% (1)
- A Review of Structural and Thermal Analysis of Traction MotorsDokumen11 halamanA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaBelum ada peringkat
- Hydraulic and Pneumatic Actuators and Their ApplicationDokumen24 halamanHydraulic and Pneumatic Actuators and Their ApplicationsarkrassBelum ada peringkat
- Power Electronics and Electric Drives for Traction ApplicationsDari EverandPower Electronics and Electric Drives for Traction ApplicationsBelum ada peringkat
- Electronic Control of Switched Reluctance MachinesDari EverandElectronic Control of Switched Reluctance MachinesPenilaian: 5 dari 5 bintang5/5 (5)
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationDari EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationBelum ada peringkat
- Engineering Drawing - Question BankDokumen32 halamanEngineering Drawing - Question Bankविशाल पुडासैनीBelum ada peringkat
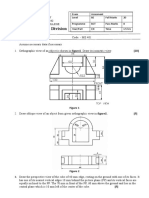
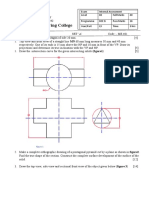
- Engineering Drawing I Final Assessment QuestionDokumen3 halamanEngineering Drawing I Final Assessment Questionविशाल पुडासैनीBelum ada peringkat
- Career Objective: Er. Bishal Pudasaini AddressDokumen4 halamanCareer Objective: Er. Bishal Pudasaini Addressविशाल पुडासैनीBelum ada peringkat
- Career Objective: Er. Bishal Pudasaini AddressDokumen4 halamanCareer Objective: Er. Bishal Pudasaini Addressविशाल पुडासैनीBelum ada peringkat
- Engineering Drawing Exam QuestionsDokumen2 halamanEngineering Drawing Exam Questionsविशाल पुडासैनीBelum ada peringkat
- Examination Control DivisionDokumen1 halamanExamination Control Divisionविशाल पुडासैनीBelum ada peringkat
- Lecture 18Dokumen1 halamanLecture 18विशाल पुडासैनीBelum ada peringkat
- Development Old Question1Dokumen1 halamanDevelopment Old Question1विशाल पुडासैनीBelum ada peringkat
- Lecture 11Dokumen1 halamanLecture 11विशाल पुडासैनीBelum ada peringkat
- Question 1Dokumen1 halamanQuestion 1विशाल पुडासैनीBelum ada peringkat
- Fundamentals of Thermodynamics and Heat TransferDokumen4 halamanFundamentals of Thermodynamics and Heat Transferविशाल पुडासैनीBelum ada peringkat
- BCE B KecDokumen2 halamanBCE B Kecविशाल पुडासैनीBelum ada peringkat
- KEC Final Assessment Workshop Technology ExamDokumen2 halamanKEC Final Assessment Workshop Technology Examविशाल पुडासैनीBelum ada peringkat
- Exam Assessment Level Full Marks Program BCT A Pass Marks Year/Part I/II TimeDokumen4 halamanExam Assessment Level Full Marks Program BCT A Pass Marks Year/Part I/II Timeविशाल पुडासैनीBelum ada peringkat
- Question 1Dokumen1 halamanQuestion 1विशाल पुडासैनीBelum ada peringkat
- Workshop - Objective - QuestionsDokumen2 halamanWorkshop - Objective - Questionsविशाल पुडासैनीBelum ada peringkat
- Set A WorkshopDokumen2 halamanSet A Workshopविशाल पुडासैनीBelum ada peringkat
- Set A WorkshopDokumen2 halamanSet A Workshopविशाल पुडासैनीBelum ada peringkat
- AL ApplicantsDokumen3 halamanAL Applicantsविशाल पुडासैनीBelum ada peringkat
- ADT3 ResultsDokumen5 halamanADT3 Resultsविशाल पुडासैनीBelum ada peringkat
- Tribhuwan University Institute of Engineering Thapathali CampusDokumen42 halamanTribhuwan University Institute of Engineering Thapathali Campusविशाल पुडासैनीBelum ada peringkat
- Tribhuwan University Institute of Engineering Thapathali CampusDokumen42 halamanTribhuwan University Institute of Engineering Thapathali Campusविशाल पुडासैनीBelum ada peringkat
- Workshop - Objective - QuestionsDokumen2 halamanWorkshop - Objective - Questionsविशाल पुडासैनीBelum ada peringkat
- Fundamentals of Thermodynamics and Heat TransferDokumen4 halamanFundamentals of Thermodynamics and Heat Transferविशाल पुडासैनीBelum ada peringkat
- Final MarksDokumen4 halamanFinal Marksविशाल पुडासैनीBelum ada peringkat
- Namelist 2075 Batch FinalDokumen8 halamanNamelist 2075 Batch Finalविशाल पुडासैनीBelum ada peringkat
- Kathmandu Engineering College Kalimati 2075 FalgunDokumen2 halamanKathmandu Engineering College Kalimati 2075 Falgunविशाल पुडासैनीBelum ada peringkat
- BCT A 2Dokumen2 halamanBCT A 2विशाल पुडासैनीBelum ada peringkat
- BCT A 2Dokumen2 halamanBCT A 2विशाल पुडासैनीBelum ada peringkat
- Examination Control DivisionDokumen2 halamanExamination Control Divisionविशाल पुडासैनीBelum ada peringkat
- Erection Procedure For Control Battery - LatestDokumen12 halamanErection Procedure For Control Battery - LatestAnmohieyBelum ada peringkat
- INSTRUMENT LISTDokumen7 halamanINSTRUMENT LISTGoogool YBelum ada peringkat
- Using The Agilent 3070 Tester For In-System ProgrammingDokumen12 halamanUsing The Agilent 3070 Tester For In-System Programmingshan_scorpio25Belum ada peringkat
- Profiteer Popcorn Machine Operation ManualDokumen12 halamanProfiteer Popcorn Machine Operation ManualBella RahmanBelum ada peringkat
- CWPHDokumen3 halamanCWPHVijay Kumar SiripurapuBelum ada peringkat
- Intel® Desktop Board D525MW Product Guide: Order Number: E95576-001Dokumen64 halamanIntel® Desktop Board D525MW Product Guide: Order Number: E95576-001Arcangelo Di BattistaBelum ada peringkat
- Black BookDokumen40 halamanBlack Bookmarnil alfornonBelum ada peringkat
- Chapter Four: Topics Discussed in This SectionDokumen34 halamanChapter Four: Topics Discussed in This SectionSolomon Tadesse AthlawBelum ada peringkat
- MEE - 1011 Module-Iii Photovoltaic Cells and SystemsDokumen22 halamanMEE - 1011 Module-Iii Photovoltaic Cells and SystemsErmias NigussieBelum ada peringkat
- Plant Shutdown ProcedureDokumen2 halamanPlant Shutdown ProceduretomiBelum ada peringkat
- ABB SACE Emax DC Circuit BreakersDokumen47 halamanABB SACE Emax DC Circuit BreakersragmuBelum ada peringkat
- A58ml2 20170831Dokumen7 halamanA58ml2 20170831AAlfie Munawir'sBelum ada peringkat
- Frequency Response of A Single Stage RC Coupled AmplifierDokumen26 halamanFrequency Response of A Single Stage RC Coupled AmplifierkanchankonwarBelum ada peringkat
- BE - Service Manual P Series - 30K36K - 220VDokumen89 halamanBE - Service Manual P Series - 30K36K - 220Vhospital hggsBelum ada peringkat
- Manual Megger TTR 550503Dokumen200 halamanManual Megger TTR 550503trex80Belum ada peringkat
- Protection Coordination Back UpDokumen35 halamanProtection Coordination Back UpJohn Paul Inovero JavierBelum ada peringkat
- Cablescout ManualDokumen2 halamanCablescout ManualArturo Orozco CastilloBelum ada peringkat
- Calculate household electric usage and global consumptionDokumen2 halamanCalculate household electric usage and global consumptionISsa Qafa'itiBelum ada peringkat
- BCS Tut QuestionsDokumen3 halamanBCS Tut Questions3176RACHANA CHOUGULE0% (1)
- MICROCONTROLLER FAMILY of PIC 18Dokumen29 halamanMICROCONTROLLER FAMILY of PIC 18Taha AssadiBelum ada peringkat
- DC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525Dokumen1 halamanDC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525NewsUPdateBelum ada peringkat
- Signal & Linear System: Basil HamedDokumen63 halamanSignal & Linear System: Basil Hamedkhaled jBelum ada peringkat
- B.Tech 4yrs ELECTRONICS & COMMUNICATION ENGG. Part - II, III, IV (SEMESTER III, IV, V, VI, VII&VIIII) Batch 2018Dokumen91 halamanB.Tech 4yrs ELECTRONICS & COMMUNICATION ENGG. Part - II, III, IV (SEMESTER III, IV, V, VI, VII&VIIII) Batch 2018sanamdeep kaur khanguraBelum ada peringkat
- Stock March 2023Dokumen6 halamanStock March 2023manojBelum ada peringkat