Anda mungkin juga menyukai
- (PDS) Lab 03 Sdlit 17 IIDokumen8 halaman(PDS) Lab 03 Sdlit 17 IIqwer33Belum ada peringkat
- Sistema de Invariantes en El TiempoDokumen13 halamanSistema de Invariantes en El TiempoJC PachecoBelum ada peringkat
- Convolucion en MatlabDokumen3 halamanConvolucion en Matlabwolf182010Belum ada peringkat
- Laboratorio 1Dokumen16 halamanLaboratorio 1Claudio BanegasBelum ada peringkat
- DSP Sem 14 - Señales de Tiempo DiscretoDokumen40 halamanDSP Sem 14 - Señales de Tiempo DiscretoJoel Jesus Perez UgarteBelum ada peringkat
- pr02 Sistemas PDFDokumen13 halamanpr02 Sistemas PDFErinson Javier Toscano RojasBelum ada peringkat
- Lab1p1 2021Dokumen4 halamanLab1p1 2021Danilo Andre LuqueBelum ada peringkat
- Practica 3Dokumen6 halamanPractica 3Noc DgBelum ada peringkat
- Resolución Guía 03 Octave 3 y Python Casi CompleDokumen62 halamanResolución Guía 03 Octave 3 y Python Casi CompleMartin Andre Rodriguez AranzanaBelum ada peringkat
- Convolucion DiscretaDokumen11 halamanConvolucion DiscretaFranco RaosBelum ada peringkat
- Convolucion, CausalDokumen27 halamanConvolucion, CausalJorge Orrante Sakanassi100% (1)
- Lab 03 PDS EC DIF 12 0Dokumen4 halamanLab 03 PDS EC DIF 12 0Luis Ich LebenBelum ada peringkat
- Procesamiento Digital de Señales PDFDokumen40 halamanProcesamiento Digital de Señales PDFAlejandra Zubieta JemioBelum ada peringkat
- p3 14Dokumen6 halamanp3 14javirv19Belum ada peringkat
- Guion 3Dokumen6 halamanGuion 3Davidsiño Andresiño VarelaBelum ada peringkat
- Sistemas Lineales Inveriantes en El Tiempo - V1Dokumen10 halamanSistemas Lineales Inveriantes en El Tiempo - V1Juliana GonzalesBelum ada peringkat
- Procesamiento Digital de SeñalesDokumen20 halamanProcesamiento Digital de SeñalesElmer RchBelum ada peringkat
- Unidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoDokumen116 halamanUnidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoVictor Rodrigo Cruz DelgadoBelum ada peringkat
- Señales y Sistemas de Tiempo Discreto - FundamentosDokumen9 halamanSeñales y Sistemas de Tiempo Discreto - FundamentosAlexander Torres VargasBelum ada peringkat
- Práctica6 AlonsoIbarraBarrios PDFDokumen5 halamanPráctica6 AlonsoIbarraBarrios PDFbigorosianoBelum ada peringkat
- Spertuz Taller02Dokumen10 halamanSpertuz Taller02Sebastiàn RugelesBelum ada peringkat
- Informe Labo1Dokumen46 halamanInforme Labo1David Justiniano Chayña HanccoBelum ada peringkat
- Cuadros Enviar Informe 2Dokumen13 halamanCuadros Enviar Informe 2Felipe Blair Ramírez ZamoraBelum ada peringkat
- Tema 06 HametDokumen18 halamanTema 06 HamethametelecomBelum ada peringkat
- 5 Respuesta TransitoriaDokumen11 halaman5 Respuesta TransitoriaAmanda GarcíaBelum ada peringkat
- Sistemas Lineales e Invariantes en El TiempoDokumen34 halamanSistemas Lineales e Invariantes en El TiempoelcanoeroBelum ada peringkat
- Lab1 Control3Dokumen40 halamanLab1 Control3Alejandra RoqueBelum ada peringkat
- Practica 1Dokumen15 halamanPractica 1Alexys RodriguezBelum ada peringkat
- Práctica 1 HGJ Control AvanzadoDokumen10 halamanPráctica 1 HGJ Control AvanzadoChar HernandezBelum ada peringkat
- AmortiguadoDokumen20 halamanAmortiguadoAnonymous az9hzE8Belum ada peringkat
- BrionesPablo P2DSPDokumen7 halamanBrionesPablo P2DSPPablo BrionesBelum ada peringkat
- Practica Proc Dig SeñDokumen17 halamanPractica Proc Dig Señpj0204Belum ada peringkat
- Informe Guia 2Dokumen11 halamanInforme Guia 2DANIEL CAMILO RODRIGUEZ RAMIREZBelum ada peringkat
- Dominio Del Tiempo y FasoresDokumen16 halamanDominio Del Tiempo y FasoresOrlando ManriqueBelum ada peringkat
- LAB6Dokumen14 halamanLAB6John CahuapazaBelum ada peringkat
- Lab 04 PD Ec Dif 20 IDokumen5 halamanLab 04 PD Ec Dif 20 IROSA BERNAOLABelum ada peringkat
- 1-Solución Numérica de Ecuaciones Diferenciales Mediante Ode45 PDFDokumen8 halaman1-Solución Numérica de Ecuaciones Diferenciales Mediante Ode45 PDFxavi_yao16Belum ada peringkat
- Laboratorio 1 - 2020 - IDokumen4 halamanLaboratorio 1 - 2020 - IKevin SantosBelum ada peringkat
- Lab ConvoluciónDokumen13 halamanLab ConvoluciónIrilizbethBelum ada peringkat
- Informe Final 1Dokumen15 halamanInforme Final 1andres zegarraBelum ada peringkat
- Ecuaciones Diferenciales Actividad 2Dokumen16 halamanEcuaciones Diferenciales Actividad 2fernanda0% (1)
- DSP Guia 6 Operaciones Con Funciones Discretas Con MATLABDokumen6 halamanDSP Guia 6 Operaciones Con Funciones Discretas Con MATLABJhonattan PortugalBelum ada peringkat
- Practica 2 LAB DSP Senales y Sistemas DiscretosDokumen7 halamanPractica 2 LAB DSP Senales y Sistemas DiscretosRaissaPazVasquezBelum ada peringkat
- Laboratorio 1 - Aliasing, ConvoluciónDokumen8 halamanLaboratorio 1 - Aliasing, ConvoluciónDiego VelascoBelum ada peringkat
- DSP OctaveDokumen41 halamanDSP OctaveDavid BerriosBelum ada peringkat
- U2 - Actividad 4 - LeemeDokumen15 halamanU2 - Actividad 4 - LeemeIsmael OchoaBelum ada peringkat
- Daniel Bustios GuillenDokumen13 halamanDaniel Bustios GuillenDaniel Alonzo Bustíos GuillénBelum ada peringkat
- (PDS) Lab 04 EcuaDiferencia 17 I V1Dokumen5 halaman(PDS) Lab 04 EcuaDiferencia 17 I V1qwer33Belum ada peringkat
- Laboratorio 1 Aliasing ConvolucionDokumen8 halamanLaboratorio 1 Aliasing Convolucionalejandro ramonBelum ada peringkat
- Convolución DiscretaDokumen5 halamanConvolución DiscretaHumberto Ramírez GascaBelum ada peringkat
- Señales y Sistemas en Tiempo DiscretoDokumen9 halamanSeñales y Sistemas en Tiempo DiscretoCesar contrerasBelum ada peringkat
- Taller 2 - Propiedades, Convolución y Análisis de Sistemas en Tiempo Discreto 2023Dokumen4 halamanTaller 2 - Propiedades, Convolución y Análisis de Sistemas en Tiempo Discreto 2023juan piñerosBelum ada peringkat
- P3 LBPDS PDFDokumen11 halamanP3 LBPDS PDFjulioBelum ada peringkat
- S04.s1 - PDS - Análisis de Señales LTIDokumen19 halamanS04.s1 - PDS - Análisis de Señales LTIIsrael NavarroBelum ada peringkat
- Métodos Matriciales para ingenieros con MATLABDari EverandMétodos Matriciales para ingenieros con MATLABPenilaian: 5 dari 5 bintang5/5 (1)
- Ciclo de Refrigeración Por Compresión de VaporDokumen28 halamanCiclo de Refrigeración Por Compresión de VaporSamir ChamieBelum ada peringkat
- Disipadores de Calor en Los MicrochipsDokumen12 halamanDisipadores de Calor en Los MicrochipsJeniffer TrianaBelum ada peringkat
- Xvi Copa Taiji Kase Open On Line 2020 - ConvocatoriaDokumen7 halamanXvi Copa Taiji Kase Open On Line 2020 - ConvocatoriaRegina GarciaBelum ada peringkat
- C.V Ing. Civil Joaquín Ortiz F IIDokumen4 halamanC.V Ing. Civil Joaquín Ortiz F IIJoaquinBelum ada peringkat
- Primera Sentencia MilpoDokumen8 halamanPrimera Sentencia MilpoChristian Morales YatacoBelum ada peringkat
- Semana 02 - Análisis EstructuralDokumen106 halamanSemana 02 - Análisis EstructuralAntony OlivasBelum ada peringkat
- Arrendamiento Agrario y AparceriaDokumen15 halamanArrendamiento Agrario y AparceriaFabián Bolandi VillalobosBelum ada peringkat
- Cuit 30717006271 24-2-2022Dokumen2 halamanCuit 30717006271 24-2-2022Estancia MayorBelum ada peringkat
- Resumen de La Constitucion Politica de ColombiaDokumen4 halamanResumen de La Constitucion Politica de ColombialixlemusBelum ada peringkat
- Introducción A La ComputaciónDokumen150 halamanIntroducción A La ComputaciónallcoolnamesaretakenBelum ada peringkat
- Diagnóstico de Conocimientos PreviosDokumen3 halamanDiagnóstico de Conocimientos Previosdaniela sepulveda cofreBelum ada peringkat
- Ayuda Docente PEICDokumen10 halamanAyuda Docente PEICRosa CroesBelum ada peringkat
- Derechos Fundamentales en El TrabajoDokumen20 halamanDerechos Fundamentales en El TrabajoLAURA ALEJANDRA LARA CRISTANCHOBelum ada peringkat
- Seguridad en El Trabajo Los AutoelevadoresDokumen7 halamanSeguridad en El Trabajo Los Autoelevadoresguillermo garciaBelum ada peringkat
- Caso Practico FusionDokumen7 halamanCaso Practico FusionAlfredo Calderón de LeónBelum ada peringkat
- Registro Mercantil en GuatemalaDokumen14 halamanRegistro Mercantil en GuatemalaKaterinne RivasBelum ada peringkat
- SintesisDokumen6 halamanSintesislulu126100% (4)
- Método de Razones SimplesDokumen14 halamanMétodo de Razones SimplesFabian SantesBelum ada peringkat
- Problem A Rio de Logica Combinacional 2009Dokumen10 halamanProblem A Rio de Logica Combinacional 2009javierespjoBelum ada peringkat
- ST-PR-11 Procedimientos de Seguridad - MIXTO - REVOLVERDokumen6 halamanST-PR-11 Procedimientos de Seguridad - MIXTO - REVOLVERCoordinador CalidadBelum ada peringkat
- Analisis TecnicoDokumen84 halamanAnalisis Tecnicomaldito13Belum ada peringkat
- (Castellano) MUNDUAREN ANTOLAMENDU POLITIKOADokumen2 halaman(Castellano) MUNDUAREN ANTOLAMENDU POLITIKOAAne EtxeberriaBelum ada peringkat
- Introduccion A La Confeccion de Un PortafoliosDokumen2 halamanIntroduccion A La Confeccion de Un PortafoliosWalter LescanoBelum ada peringkat
- Determincion de La Textura Del Suelo Por El Metodo Del HidrometroDokumen16 halamanDetermincion de La Textura Del Suelo Por El Metodo Del HidrometroLópez Acero Juan JoséBelum ada peringkat
- En Perforación Tiene Gran Importancia La Resistencia Al Corte o Dureza de La Roca y La AbrasividadDokumen3 halamanEn Perforación Tiene Gran Importancia La Resistencia Al Corte o Dureza de La Roca y La AbrasividadCarlos Leon OrtizBelum ada peringkat
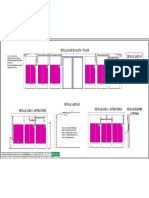
- Detalle ExtractoresDokumen1 halamanDetalle ExtractoresMARIO SINISTERRABelum ada peringkat
- IntegraciónDokumen7 halamanIntegraciónBelen AlvarezBelum ada peringkat
- Brochure Valle Grande 3Dokumen2 halamanBrochure Valle Grande 3Miriam LopezBelum ada peringkat
- Mercados FinancierosDokumen51 halamanMercados Financieroscindy oviedoBelum ada peringkat
- IMPLEMENTAR UN CAMBIO EN EL ACOMPAÑAMIENTO DE AULA Nucleo PedagogicoDokumen73 halamanIMPLEMENTAR UN CAMBIO EN EL ACOMPAÑAMIENTO DE AULA Nucleo Pedagogicotanny00Belum ada peringkat