Anda mungkin juga menyukai
- Title GSM Based Fire and Smoke DetectionDokumen49 halamanTitle GSM Based Fire and Smoke Detectionmark lumbresBelum ada peringkat
- Speed Limit Chapter 1Dokumen21 halamanSpeed Limit Chapter 1kalu chimdiBelum ada peringkat
- An IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemDokumen17 halamanAn IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemM NAVYABelum ada peringkat
- Case StudiesDokumen7 halamanCase StudieshoperayBelum ada peringkat
- Gourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleDokumen19 halamanGourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleRaj MandloiBelum ada peringkat
- Project Covid 19Dokumen24 halamanProject Covid 19Bilal BhatBelum ada peringkat
- REPORT (Automatic Sreet Light Controlling Based On Vehicle Movement)Dokumen20 halamanREPORT (Automatic Sreet Light Controlling Based On Vehicle Movement)Arbab AslamBelum ada peringkat
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDokumen2 halamanControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorBelum ada peringkat
- Automatic Traffic Light Control UsingDokumen35 halamanAutomatic Traffic Light Control UsingDilyalew DebreworkBelum ada peringkat
- Project Report - Docx 11111Dokumen46 halamanProject Report - Docx 11111Narayan SutharBelum ada peringkat
- Automatic Speed Control SystemDokumen11 halamanAutomatic Speed Control SystemSatish ToramBelum ada peringkat
- Aqua Drone Ieee PaperDokumen3 halamanAqua Drone Ieee PaperAkash ShahuBelum ada peringkat
- Smart Notice BoardDokumen42 halamanSmart Notice BoardDhiraj BhattBelum ada peringkat
- Automatic Brake Failure IndicatorDokumen1 halamanAutomatic Brake Failure Indicatorbalabooks100% (1)
- On "GSM BASED E-NOTICE BOARD"Dokumen28 halamanOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Smart Pesticide & Fertilizer Spraying RobotDokumen6 halamanSmart Pesticide & Fertilizer Spraying RobotJiiva GopiBelum ada peringkat
- Live Human Being Detection Wireless Remote Controlled RobotDokumen59 halamanLive Human Being Detection Wireless Remote Controlled RobotAnand Cool90% (10)
- Project Report On Automated Multi Storied Car Parking SystemDokumen5 halamanProject Report On Automated Multi Storied Car Parking SystemJavaid Iqbal0% (1)
- Finger Print Vehicle StarterDokumen3 halamanFinger Print Vehicle StarterTECHer YTBelum ada peringkat
- Density Based Traffic Light Control SystemDokumen34 halamanDensity Based Traffic Light Control SystemPrabhakarSinghBelum ada peringkat
- Digital Incubator Using ArduinoDokumen11 halamanDigital Incubator Using Arduinojanani subramaniamBelum ada peringkat
- Acs PDFDokumen2 halamanAcs PDFAkshay PowarBelum ada peringkat
- Fault Detection in Transmission Line Using GSM Technology 4301,4304,4313Dokumen67 halamanFault Detection in Transmission Line Using GSM Technology 4301,4304,4313naveen gBelum ada peringkat
- Automatic Irrigation System Using AURDINO Uno (Mine)Dokumen41 halamanAutomatic Irrigation System Using AURDINO Uno (Mine)Shobha HebballiBelum ada peringkat
- Alarm System For Medicine Reminder Based On MicrocontrollerDokumen4 halamanAlarm System For Medicine Reminder Based On MicrocontrollerEditor IJTSRD100% (1)
- Final Mini Project ReportDokumen29 halamanFinal Mini Project ReportumaBelum ada peringkat
- Original Project WorkDokumen65 halamanOriginal Project WorkKonda PrashanthBelum ada peringkat
- Major Project Shopping TrolleyDokumen50 halamanMajor Project Shopping TrolleyRohith SharmaBelum ada peringkat
- Aurdino Voting MachineDokumen70 halamanAurdino Voting MachinepavithraBelum ada peringkat
- Wireless LCD Via BluetoothDokumen39 halamanWireless LCD Via BluetoothAniket Garapati100% (1)
- An IoT Based Smart Helmet For AccidentDokumen6 halamanAn IoT Based Smart Helmet For Accidentmarlon_tayagBelum ada peringkat
- Traffic Light Sensor Using Arduino BoardDokumen24 halamanTraffic Light Sensor Using Arduino BoardArunkumarBelum ada peringkat
- New Arduino Based Home Automation Using Bluetooth Smart Phone-1Dokumen4 halamanNew Arduino Based Home Automation Using Bluetooth Smart Phone-1Shristi SinghBelum ada peringkat
- Design and Implement A Smart Blind StickDokumen7 halamanDesign and Implement A Smart Blind StickbizunehBelum ada peringkat
- Project Report On Android Based Electronics Notice BoardDokumen7 halamanProject Report On Android Based Electronics Notice BoardArpit joshiBelum ada peringkat
- Voice Based Notice Board Using Android ApplicationDokumen17 halamanVoice Based Notice Board Using Android ApplicationBiswajitBelum ada peringkat
- Synopsis On Multi Purpose Agricultural RobotDokumen10 halamanSynopsis On Multi Purpose Agricultural Robotpavan pujarBelum ada peringkat
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDokumen19 halamanUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautBelum ada peringkat
- IOT Based Vehicle Parking and Toll-Fee Management System Using Raspberry Pi 3Dokumen6 halamanIOT Based Vehicle Parking and Toll-Fee Management System Using Raspberry Pi 3International Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Wireless RF Project Report For Web PDFDokumen70 halamanWireless RF Project Report For Web PDFpedro100% (1)
- Arduino Based Traffic Light Control SystemDokumen57 halamanArduino Based Traffic Light Control SystemSoresa Jemal100% (1)
- Vehical Starting System Using Finger PrintDokumen18 halamanVehical Starting System Using Finger PrintVIKASH SINGHBelum ada peringkat
- Automatic Irrigation System Using Arduino MicrocontrollerDokumen41 halamanAutomatic Irrigation System Using Arduino MicrocontrollerCherinet GashawBelum ada peringkat
- Voice Controlled Robot CarDokumen28 halamanVoice Controlled Robot CarRajeev SinghaniyaBelum ada peringkat
- Project Reprt333Dokumen49 halamanProject Reprt333dhirajsingh_avit83% (6)
- Bharath Fire Fighting RobotDokumen43 halamanBharath Fire Fighting RobotDebojit DasBelum ada peringkat
- Design of Intelligent Ambulance and Traffic Control RFDokumen12 halamanDesign of Intelligent Ambulance and Traffic Control RFBala GaneshBelum ada peringkat
- Android Based Bluetooth Door Lock Using Arduino PDF Documentation PDFDokumen1 halamanAndroid Based Bluetooth Door Lock Using Arduino PDF Documentation PDFRendel NalanganBelum ada peringkat
- Robotic Arm ReportDokumen39 halamanRobotic Arm Reportsriku519100% (1)
- SMART PARKING SYSTEM USING INTERNET of THINGS (IoT)Dokumen4 halamanSMART PARKING SYSTEM USING INTERNET of THINGS (IoT)GRD Journals100% (2)
- Pce Mini Project Report: "RF Transmitter and Receiver"Dokumen9 halamanPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiBelum ada peringkat
- Automatic Railway Gate Control SystemDokumen26 halamanAutomatic Railway Gate Control Systemprakhar agarwalBelum ada peringkat
- Major Project Report On War Field Spy RobotDokumen52 halamanMajor Project Report On War Field Spy RobotBarun Dhiman75% (8)
- Dam Monitoring SystemDokumen43 halamanDam Monitoring SystemRoshan MBelum ada peringkat
- Final ThesisDokumen41 halamanFinal Thesisbhagwat.verma12411Belum ada peringkat
- E Notice Board - 2Dokumen4 halamanE Notice Board - 2Magical MKBelum ada peringkat
- Alcohol Detection System in CarsDokumen12 halamanAlcohol Detection System in CarsRat.T67% (3)
- Cell Phone Operated Land Rover/toy CarDokumen46 halamanCell Phone Operated Land Rover/toy Caranshul_all50% (2)
- GSM Controlled RobotDokumen46 halamanGSM Controlled RobotRavi Shankar K BBelum ada peringkat
- Department of Electronics and CommunicationDokumen20 halamanDepartment of Electronics and Communicationanugya sharmaBelum ada peringkat
- AppendicitisDokumen7 halamanAppendicitisTim LuoBelum ada peringkat
- Lesson 2 Basic Osah, General Provisions, Safety Rules..Dokumen30 halamanLesson 2 Basic Osah, General Provisions, Safety Rules..GM VispoBelum ada peringkat
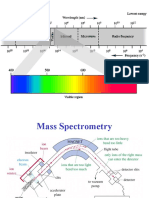
- Mass SpectrometryDokumen49 halamanMass SpectrometryUbaid ShabirBelum ada peringkat
- Sedation and Analgesia in Critically Ill Neurologic PatientsDokumen24 halamanSedation and Analgesia in Critically Ill Neurologic PatientsrazaksoedBelum ada peringkat
- R633199 PDFDokumen1 halamanR633199 PDFChirag RohitBelum ada peringkat
- Medical Representative Healthcare Sales in Fort Myers FL Resume Greg HejlikDokumen2 halamanMedical Representative Healthcare Sales in Fort Myers FL Resume Greg HejlikGregHejlikBelum ada peringkat
- Reference Document GOIDokumen2 halamanReference Document GOIPranav BadrakiaBelum ada peringkat
- Poisoned NeedleDokumen147 halamanPoisoned NeedleMark Cooper100% (3)
- Variable Compression Ratio Engines A Literature Review: December 2018Dokumen15 halamanVariable Compression Ratio Engines A Literature Review: December 2018Er Samkit ShahBelum ada peringkat
- Fin e 59 2016Dokumen10 halamanFin e 59 2016Brooks OrtizBelum ada peringkat
- Snap Bore Ring PDFDokumen8 halamanSnap Bore Ring PDFlaaliBelum ada peringkat
- Subquery ProblemDokumen9 halamanSubquery ProblemAbhi RamBelum ada peringkat
- D05 Directional Control Valves EngineeringDokumen11 halamanD05 Directional Control Valves EngineeringVentas Control HidráulicoBelum ada peringkat
- Signage Method of Statement and Risk AssessmentDokumen3 halamanSignage Method of Statement and Risk AssessmentNajmal AmanBelum ada peringkat
- ExamDokumen10 halamanExamjohn ivan100% (1)
- Laughter, It Is Good For YouDokumen2 halamanLaughter, It Is Good For YouClaire B.L.Belum ada peringkat
- The Chemical Composition and Organoleptic Attributes of Lesser-Known Vegetables As Consumed in Njikoka Local Government Area, Anambra State, NigeriaDokumen4 halamanThe Chemical Composition and Organoleptic Attributes of Lesser-Known Vegetables As Consumed in Njikoka Local Government Area, Anambra State, NigeriaEmri CynthiaBelum ada peringkat
- To 33B-1-1 01jan2013Dokumen856 halamanTo 33B-1-1 01jan2013izmitlimonBelum ada peringkat
- Durock Cement Board System Guide en SA932Dokumen12 halamanDurock Cement Board System Guide en SA932Ko PhyoBelum ada peringkat
- Coalition TacticsDokumen2 halamanCoalition Tacticsakumar4u100% (1)
- Userguide SW-MC V2 2015-W45 EN S034308Dokumen131 halamanUserguide SW-MC V2 2015-W45 EN S034308ReneBelum ada peringkat
- Aircaft Avionics SystemDokumen21 halamanAircaft Avionics SystemPavan KumarBelum ada peringkat
- Brain Slides SEMINAR 1 - 220606 - 142811 - 220606 - 223805Dokumen32 halamanBrain Slides SEMINAR 1 - 220606 - 142811 - 220606 - 223805pang pangBelum ada peringkat
- CH 13 RNA and Protein SynthesisDokumen12 halamanCH 13 RNA and Protein SynthesisHannah50% (2)
- PowderCoatingResins ProductGuide 0Dokumen20 halamanPowderCoatingResins ProductGuide 0zizitroBelum ada peringkat
- Hydrogen Production From The Air: Nature CommunicationsDokumen9 halamanHydrogen Production From The Air: Nature CommunicationsdfdffBelum ada peringkat
- Macroscopic Physics Chemistry HW #1Dokumen11 halamanMacroscopic Physics Chemistry HW #1Akash ModyBelum ada peringkat
- Drill Site Audit ChecklistDokumen5 halamanDrill Site Audit ChecklistKristian BohorqzBelum ada peringkat
- Cough PDFDokumen3 halamanCough PDFKASIA SyBelum ada peringkat
- Electric Motor Control: DC, AC, and BLDC MotorsDari EverandElectric Motor Control: DC, AC, and BLDC MotorsPenilaian: 4.5 dari 5 bintang4.5/5 (19)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDari EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDari EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterBelum ada peringkat
- Electric Motors and Drives: Fundamentals, Types and ApplicationsDari EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Well Control for Completions and InterventionsDari EverandWell Control for Completions and InterventionsPenilaian: 4 dari 5 bintang4/5 (10)
- Well Integrity for Workovers and RecompletionsDari EverandWell Integrity for Workovers and RecompletionsPenilaian: 5 dari 5 bintang5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDari EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialBelum ada peringkat
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceDari EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceBelum ada peringkat
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingDari EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingBelum ada peringkat
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDari EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ADari EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ABelum ada peringkat
- Introduction to Power System ProtectionDari EverandIntroduction to Power System ProtectionPenilaian: 5 dari 5 bintang5/5 (1)
- Renewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningDari EverandRenewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningPenilaian: 5 dari 5 bintang5/5 (4)
- Thermal Power Plant: Design and OperationDari EverandThermal Power Plant: Design and OperationPenilaian: 4.5 dari 5 bintang4.5/5 (23)
- Handbook on Battery Energy Storage SystemDari EverandHandbook on Battery Energy Storage SystemPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Pipeline and Energy Plant Piping: Design and TechnologyDari EverandPipeline and Energy Plant Piping: Design and TechnologyPenilaian: 5 dari 5 bintang5/5 (2)
- Practical Power Distribution for IndustryDari EverandPractical Power Distribution for IndustryPenilaian: 2.5 dari 5 bintang2.5/5 (2)
- Global Landscape of Renewable Energy FinanceDari EverandGlobal Landscape of Renewable Energy FinanceBelum ada peringkat
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsDari EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDari EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsBelum ada peringkat
- Heat Transfer Engineering: Fundamentals and TechniquesDari EverandHeat Transfer Engineering: Fundamentals and TechniquesPenilaian: 4 dari 5 bintang4/5 (1)
- The Truth About Solar Panels The Book That Solar Manufacturers, Vendors, Installers And DIY Scammers Don't Want You To ReadDari EverandThe Truth About Solar Panels The Book That Solar Manufacturers, Vendors, Installers And DIY Scammers Don't Want You To ReadPenilaian: 4.5 dari 5 bintang4.5/5 (10)
- Shorting the Grid: The Hidden Fragility of Our Electric GridDari EverandShorting the Grid: The Hidden Fragility of Our Electric GridPenilaian: 4.5 dari 5 bintang4.5/5 (2)