Anda mungkin juga menyukai
- Lecture 10Dokumen8 halamanLecture 10EdutamBelum ada peringkat
- Lecture 13Dokumen7 halamanLecture 13EdutamBelum ada peringkat
- Elec9731 LM2Dokumen44 halamanElec9731 LM2wyx840927627Belum ada peringkat
- Chapter 8 State Space AnalysisDokumen22 halamanChapter 8 State Space AnalysisAli AhmadBelum ada peringkat
- Lecture 12Dokumen6 halamanLecture 12EdutamBelum ada peringkat
- Note 5Dokumen14 halamanNote 5MohamedBelum ada peringkat
- Serv - Chula.ac - TH Tarporn 487 HandOut DynamicCDokumen38 halamanServ - Chula.ac - TH Tarporn 487 HandOut DynamicCAaditya RoyBelum ada peringkat
- AP BC ReviewDokumen7 halamanAP BC ReviewchowmeinnoodleBelum ada peringkat
- 01 Review of Closed Loop ControlDokumen17 halaman01 Review of Closed Loop ControlferrarivcaBelum ada peringkat
- X X X X Ecx Ecx: Tan - Sec Sec Cot - Cos CosDokumen4 halamanX X X X Ecx Ecx: Tan - Sec Sec Cot - Cos Cossharanmit2039Belum ada peringkat
- ME 3253 Linear Systems Theory ReviewDokumen30 halamanME 3253 Linear Systems Theory Reviewmohammed dowBelum ada peringkat
- Adaptive Control (Karl J. Astrom) 2nd Ed - Solution ManualDokumen47 halamanAdaptive Control (Karl J. Astrom) 2nd Ed - Solution Manualjose492432Belum ada peringkat
- Chapter 4Dokumen39 halamanChapter 4Joseph IbrahimBelum ada peringkat
- EE 4314 - Control Systems: Transfer Function and Ode SolutionDokumen5 halamanEE 4314 - Control Systems: Transfer Function and Ode SolutionTimothy FieldsBelum ada peringkat
- Suggested Solution To Past Papers PDFDokumen20 halamanSuggested Solution To Past Papers PDFMgla AngelBelum ada peringkat
- MATHEMATICAL TOOLS FOR PHYSICSDokumen16 halamanMATHEMATICAL TOOLS FOR PHYSICSJit AggBelum ada peringkat
- Chapter 1 IntroductionDokumen32 halamanChapter 1 IntroductionYucheng XiangBelum ada peringkat
- Time ResponseDokumen29 halamanTime ResponseKhairunnisa Abu KhairBelum ada peringkat
- Advanced Control SISO-MIMO Design ExamplesDokumen14 halamanAdvanced Control SISO-MIMO Design ExamplesArundhati ChaudhariBelum ada peringkat
- PS7 2011Dokumen2 halamanPS7 2011Muhammad Zubair SheikhBelum ada peringkat
- Signal System ObjectiveDokumen82 halamanSignal System ObjectiveNitin Kathuria100% (3)
- Laplace TransformationDokumen10 halamanLaplace TransformationAhasan UllaBelum ada peringkat
- Differnetial Equation Cheat SheetDokumen5 halamanDiffernetial Equation Cheat SheetDebayan Dasgupta100% (4)
- Example Sheet For Ordinary Differential EquationsDokumen5 halamanExample Sheet For Ordinary Differential EquationsNivedha RadhakrishnanBelum ada peringkat
- Cauchy Euler Equations Explained - Univerity of FloridaDokumen4 halamanCauchy Euler Equations Explained - Univerity of FloridaManolis PapanagiotouBelum ada peringkat
- Control system analysisDokumen6 halamanControl system analysisShweta raiBelum ada peringkat
- Olver PDE Student Solutions ManualDokumen63 halamanOlver PDE Student Solutions ManualKhaled Tamimy50% (2)
- 7-Calculus of VariationsDokumen23 halaman7-Calculus of VariationsBogdan ManeaBelum ada peringkat
- EE561 Fall2013 Midterm SolDokumen5 halamanEE561 Fall2013 Midterm SolzoyosBelum ada peringkat
- Control Systems Formula SheetDokumen12 halamanControl Systems Formula SheetliamhrBelum ada peringkat
- Signals and Systems FormulasDokumen3 halamanSignals and Systems FormulasKPRBTBelum ada peringkat
- Control Systems: Dynamic ResponseDokumen35 halamanControl Systems: Dynamic ResponseLovemore MakombeBelum ada peringkat
- Notes LT3Dokumen12 halamanNotes LT3veteron56Belum ada peringkat
- MODELING LINEAR SYSTEMSDokumen39 halamanMODELING LINEAR SYSTEMSFreyley LeyvaBelum ada peringkat
- CONTROL SYSTEMS ENGINEERING TUTORIALDokumen5 halamanCONTROL SYSTEMS ENGINEERING TUTORIALcataiceBelum ada peringkat
- 5ESB0 2018 05 Midterm AnswersDokumen5 halaman5ESB0 2018 05 Midterm Answerscancer 123Belum ada peringkat
- Differential Equations: Math 217 - Spring 2010 March ExamDokumen9 halamanDifferential Equations: Math 217 - Spring 2010 March ExamRafi Mahmoud SulaimanBelum ada peringkat
- Sampling and ReconstructionDokumen21 halamanSampling and ReconstructionLuis Miguel BarrenoBelum ada peringkat
- Stochastic Calculus Cheatsheet Stocalc PDFDokumen4 halamanStochastic Calculus Cheatsheet Stocalc PDFAbraham SauvingnonBelum ada peringkat
- Personnal Work MIA PBL 7Dokumen5 halamanPersonnal Work MIA PBL 7Gloire MATHE-MUKUHIBelum ada peringkat
- Solving First-Order DE Using Solution Curves, Separation of Variables and Linear MethodsDokumen2 halamanSolving First-Order DE Using Solution Curves, Separation of Variables and Linear MethodsjosiahgerberBelum ada peringkat
- Calculus Notes: 1 DifferentiationDokumen6 halamanCalculus Notes: 1 DifferentiationsdrakosBelum ada peringkat
- Modern Control Lec2Dokumen19 halamanModern Control Lec2Saad FaruquiBelum ada peringkat
- Multivariable calculus practice problems and formulasDokumen5 halamanMultivariable calculus practice problems and formulaslieth-4Belum ada peringkat
- Exam - 2012 10 30Dokumen5 halamanExam - 2012 10 30lieth-4Belum ada peringkat
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDokumen38 halamanTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aBelum ada peringkat
- PDE HW Chap 3Dokumen9 halamanPDE HW Chap 3ammar_harb100% (1)
- Laplace Transform Lecture NotesDokumen23 halamanLaplace Transform Lecture NotesmorbidlarueBelum ada peringkat
- EL-4701 Modelos de Sistemas: FormularioDokumen9 halamanEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaBelum ada peringkat
- Indian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Dokumen2 halamanIndian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Black ReaperBelum ada peringkat
- 2008 Paper 1Dokumen53 halaman2008 Paper 1Aashray KothaBelum ada peringkat
- MAE200B - Homework No. 1: Laura Novoa January 15, 2016Dokumen14 halamanMAE200B - Homework No. 1: Laura Novoa January 15, 2016Laura NovoaBelum ada peringkat
- Z TransformDokumen22 halamanZ TransformcivaasBelum ada peringkat
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDari EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesBelum ada peringkat
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Dari EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Belum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- Pais - Indonesia-2009-Articulo Asiaconstruct Conference PDFDokumen17 halamanPais - Indonesia-2009-Articulo Asiaconstruct Conference PDFEdutamBelum ada peringkat
- Sketchup Indice Manual PDFDokumen2 halamanSketchup Indice Manual PDFEdutamBelum ada peringkat
- Electricity Guide 2013Dokumen130 halamanElectricity Guide 2013Yessica Noventina SihotangBelum ada peringkat
- India 2014 Cost HandbookDokumen118 halamanIndia 2014 Cost HandbookEdutamBelum ada peringkat
- Hong Kong 2015 Cost HandbookDokumen163 halamanHong Kong 2015 Cost HandbookEdutamBelum ada peringkat
- Japan-2013-Asiaconstruct ConferenceDokumen35 halamanJapan-2013-Asiaconstruct ConferenceEdutamBelum ada peringkat
- 2014 Asia Construct ConferencDokumen37 halaman2014 Asia Construct ConferencDista Fildzah AmalinaBelum ada peringkat
- Indonesia 2014 Asiaconstruct ConferenceDokumen54 halamanIndonesia 2014 Asiaconstruct ConferenceEdutamBelum ada peringkat
- Guinea Bissau - 2014Dokumen2 halamanGuinea Bissau - 2014EdutamBelum ada peringkat
- New Zealand Construction Outlook Weak After RecessionDokumen24 halamanNew Zealand Construction Outlook Weak After RecessionEdutamBelum ada peringkat
- Corea 2016 Cost HandbookDokumen70 halamanCorea 2016 Cost HandbookEdutamBelum ada peringkat
- Irland 2015 HandbookDokumen48 halamanIrland 2015 HandbookEdutamBelum ada peringkat
- Indonesian Civil Code in EnglishDokumen229 halamanIndonesian Civil Code in EnglishvafranciBelum ada peringkat
- Sri Lanka Asiaconstruct Conference 2014Dokumen76 halamanSri Lanka Asiaconstruct Conference 2014EdutamBelum ada peringkat
- Pais - Tailandia-2011-Costs of Bussiness PDFDokumen73 halamanPais - Tailandia-2011-Costs of Bussiness PDFEdutamBelum ada peringkat
- Indonesian Law On ExtraditionDokumen19 halamanIndonesian Law On ExtraditionEdutamBelum ada peringkat
- Malaysia Handbook 2014Dokumen116 halamanMalaysia Handbook 2014Wilson LaiBelum ada peringkat
- Indonesian Penal CodeDokumen93 halamanIndonesian Penal CodeEdutamBelum ada peringkat
- Engineering Design Guidelines - Compressors Rev02 KLM Technology GroupDokumen32 halamanEngineering Design Guidelines - Compressors Rev02 KLM Technology GroupAhmed Fgt Kaasehg0% (1)
- Pump Selection GuideDokumen12 halamanPump Selection GuideLeok Tang100% (2)
- Indonesian Law of ContractsDokumen288 halamanIndonesian Law of ContractsEdutam100% (2)
- Engineering Design Guidelines - Compressors Rev02 KLM Technology GroupDokumen32 halamanEngineering Design Guidelines - Compressors Rev02 KLM Technology GroupAhmed Fgt Kaasehg0% (1)
- Sudstech Typical SpecificationDokumen2 halamanSudstech Typical SpecificationEdutamBelum ada peringkat
- Rockwell - Medium Voltage Smart Motor ControllersDokumen44 halamanRockwell - Medium Voltage Smart Motor ControllersEdutamBelum ada peringkat
- Motores HIMOINSA - CatalogoDokumen64 halamanMotores HIMOINSA - CatalogoEdutam75% (4)
- Power-Gen Europe 2016 ExpositorsDokumen24 halamanPower-Gen Europe 2016 ExpositorsEdutamBelum ada peringkat
- Titan 250 Perfomance DataDokumen2 halamanTitan 250 Perfomance DatasrikarmallampatiBelum ada peringkat
- JCM 502 Stainless Steel Service Saddle 0413Dokumen2 halamanJCM 502 Stainless Steel Service Saddle 0413EdutamBelum ada peringkat
- Cost and Performance Baseline For Fossil Fuel Energy PlantsDokumen516 halamanCost and Performance Baseline For Fossil Fuel Energy PlantsEdutamBelum ada peringkat
- Power PlantDokumen108 halamanPower PlantAmrita ChakrabortyBelum ada peringkat
- Thermodynamics of Fluid-Phase Equilibria For Standard ChemicDokumen23 halamanThermodynamics of Fluid-Phase Equilibria For Standard ChemicJenkeiz KhanBelum ada peringkat
- ZGP Refraction IndexDokumen6 halamanZGP Refraction Indexourapteryx514Belum ada peringkat
- Hyperladder 1kb Product ManualDokumen1 halamanHyperladder 1kb Product Manualhandika ramadhaniBelum ada peringkat
- Periodic WavesDokumen26 halamanPeriodic WavesFranz CantaraBelum ada peringkat
- Parabolic PDEs: Explicit Methods for Solving Heat and Mass Diffusion ProblemsDokumen25 halamanParabolic PDEs: Explicit Methods for Solving Heat and Mass Diffusion ProblemsreynaldiBelum ada peringkat
- Copmpsite - Advance OpenGL ShaderDokumen34 halamanCopmpsite - Advance OpenGL ShaderdaneshnedaieBelum ada peringkat
- The Modulus FunctionDokumen6 halamanThe Modulus FunctionwolfretonmathsBelum ada peringkat
- Engineering Mathematics Iv Question Bank PDFDokumen8 halamanEngineering Mathematics Iv Question Bank PDFJinuRoyBelum ada peringkat
- APA style research article duct design calibrationDokumen2 halamanAPA style research article duct design calibrationNygel CanamanBelum ada peringkat
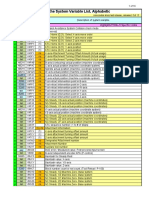
- SystemVarsAlpha List OkumaDokumen16 halamanSystemVarsAlpha List Okumaseb_dominique100% (2)
- Bore & Key SheetsDokumen2 halamanBore & Key Sheetsalexandre_motta_3Belum ada peringkat
- Tuning of PID Controllers For Unstable Continuous Stirred Tank ReactorsDokumen18 halamanTuning of PID Controllers For Unstable Continuous Stirred Tank ReactorsAgung Podo MoroBelum ada peringkat
- 3.7 Appendix D - Minimum RequirementsDokumen14 halaman3.7 Appendix D - Minimum RequirementsendyBelum ada peringkat
- Multifunctional Scouring AgentDokumen4 halamanMultifunctional Scouring AgentTribhuvan Kumar SangerpalBelum ada peringkat
- Homework 6 SolutionDokumen3 halamanHomework 6 SolutionJohnBelum ada peringkat
- Improved Thermal Piping Analysis For Reciprocating Compressor Piping SystemsDokumen7 halamanImproved Thermal Piping Analysis For Reciprocating Compressor Piping SystemsJimmy Alexander AvilaBelum ada peringkat
- Format - CISDokumen8 halamanFormat - CISgopichandallakaBelum ada peringkat
- DPP 5TH May 2020Dokumen14 halamanDPP 5TH May 2020Nishit PBelum ada peringkat
- Brewsters AngleDokumen7 halamanBrewsters AngleReddyvari VenugopalBelum ada peringkat
- Matm Introduction 2Dokumen14 halamanMatm Introduction 2bobBelum ada peringkat
- Torsion of Closed Section Beams - HW 5 - CDokumen43 halamanTorsion of Closed Section Beams - HW 5 - Cbaska14Belum ada peringkat
- Recent Topics of Japanese Design Codes For Steel and Composite BridgesDokumen6 halamanRecent Topics of Japanese Design Codes For Steel and Composite BridgesHuan VoBelum ada peringkat
- Undamped Free Vibration-Lab Report: Author: Muhammad Sohaib AlamDokumen11 halamanUndamped Free Vibration-Lab Report: Author: Muhammad Sohaib AlamfaqhrulBelum ada peringkat
- Flash Car Racing GameDokumen13 halamanFlash Car Racing GameSutirth TrivediBelum ada peringkat
- 2012 OLevel Science Physics Paper 2 Questions and AnswersDokumen10 halaman2012 OLevel Science Physics Paper 2 Questions and AnswersMethodology OfStudiesBelum ada peringkat
- The Physics of The Ear and Eye PDFDokumen3 halamanThe Physics of The Ear and Eye PDFNorctoic oneBelum ada peringkat
- Computer VisionDokumen38 halamanComputer VisionMAJIDBelum ada peringkat
- Errors of Refraction PDFDokumen2 halamanErrors of Refraction PDFMichelleBelum ada peringkat
- Crystal Structure SymmetryDokumen45 halamanCrystal Structure SymmetryBasharat AhmadBelum ada peringkat
- Lateral Earth PressureDokumen29 halamanLateral Earth PressureAaquib MahfuzBelum ada peringkat