Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rizal and The Theory of NationalismDokumen37 halamanRizal and The Theory of NationalismLiza Betua Sotelo78% (58)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Building The Gws Slow Stick PlaneDokumen21 halamanBuilding The Gws Slow Stick PlaneNUFA88Belum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- All I Need Is Love by Klaus Kinski 0394549163 PDFDokumen5 halamanAll I Need Is Love by Klaus Kinski 0394549163 PDFFernanda ArzaguetBelum ada peringkat
- Sri G Hari Hara Iyer: Energy Conservation and AuditingDokumen1 halamanSri G Hari Hara Iyer: Energy Conservation and AuditingSheri Abhishek ReddyBelum ada peringkat
- Mgit Eee Webinar6 17-07-2020Dokumen1 halamanMgit Eee Webinar6 17-07-2020Sheri Abhishek ReddyBelum ada peringkat
- List of Participants For FDP2Dokumen7 halamanList of Participants For FDP2Sheri Abhishek ReddyBelum ada peringkat
- Mgit Eee Webinar4 13-07-2020Dokumen1 halamanMgit Eee Webinar4 13-07-2020Sheri Abhishek ReddyBelum ada peringkat
- r18 B.tech Eee II Year SyllabusDokumen31 halamanr18 B.tech Eee II Year SyllabusRamanujam TatipamulaBelum ada peringkat
- Grand Assignment IDokumen3 halamanGrand Assignment ISheri Abhishek ReddyBelum ada peringkat
- Energy Conservation and Auditing: Department of Electrical and Electronics Engineering Presents A Webinar OnDokumen1 halamanEnergy Conservation and Auditing: Department of Electrical and Electronics Engineering Presents A Webinar OnSheri Abhishek ReddyBelum ada peringkat
- Tidu030 PDFDokumen24 halamanTidu030 PDFAbhishek mavatkarBelum ada peringkat
- Electrical and Electronics EnggDokumen33 halamanElectrical and Electronics EnggideepujBelum ada peringkat
- Devgan MantoshDokumen119 halamanDevgan MantoshSheri Abhishek ReddyBelum ada peringkat
- A General Formulation of Impedance and Admittance of CablesDokumen9 halamanA General Formulation of Impedance and Admittance of CablesYuan Gao100% (1)
- Mor Ched 1999Dokumen7 halamanMor Ched 1999aramirezbenitesBelum ada peringkat
- Electrical Machinery - Dr. P S BimbhraDokumen332 halamanElectrical Machinery - Dr. P S BimbhraPandoraSkyBelum ada peringkat
- R16B TECHEEEIVYearSyllabus PDFDokumen243 halamanR16B TECHEEEIVYearSyllabus PDFSheri Abhishek ReddyBelum ada peringkat
- LAB MANUAL ADSlatest PDFDokumen62 halamanLAB MANUAL ADSlatest PDFP HAMSA DATTABelum ada peringkat
- GOTF2018 CallForPapers PDFDokumen1 halamanGOTF2018 CallForPapers PDFSheri Abhishek ReddyBelum ada peringkat
- MQPDokumen141 halamanMQPSheri Abhishek Reddy100% (1)
- Academic Calendar 2018 19 For BTech II III IV Years PDFDokumen1 halamanAcademic Calendar 2018 19 For BTech II III IV Years PDFSheri Abhishek ReddyBelum ada peringkat
- EDS Lesson Plan 2018-2019 EEE-1 - 1 PDFDokumen5 halamanEDS Lesson Plan 2018-2019 EEE-1 - 1 PDFSheri Abhishek ReddyBelum ada peringkat
- CSIR TgformDokumen6 halamanCSIR TgformSheri Abhishek ReddyBelum ada peringkat
- Synopsis Sample YM Showcase 2018Dokumen2 halamanSynopsis Sample YM Showcase 2018Sheri Abhishek ReddyBelum ada peringkat
- EDS Lesson Plan 2018-2019 EEE-1 - 1 PDFDokumen5 halamanEDS Lesson Plan 2018-2019 EEE-1 - 1 PDFSheri Abhishek ReddyBelum ada peringkat
- Young Engineers at CIGRE:: IIN NT TR RO OD DU UC CT Tiio ON NDokumen2 halamanYoung Engineers at CIGRE:: IIN NT TR RO OD DU UC CT Tiio ON NSheri Abhishek ReddyBelum ada peringkat
- DSMA Module 1Dokumen55 halamanDSMA Module 1Sheri Abhishek ReddyBelum ada peringkat
- DSMA Module 4Dokumen55 halamanDSMA Module 4Sheri Abhishek ReddyBelum ada peringkat
- AQIS General InstructionsDokumen4 halamanAQIS General InstructionsSheri Abhishek ReddyBelum ada peringkat
- NITC Transcripts Form PDFDokumen2 halamanNITC Transcripts Form PDFSheri Abhishek ReddyBelum ada peringkat
- Terms and Evaluation For The GrantDokumen6 halamanTerms and Evaluation For The GrantSheri Abhishek ReddyBelum ada peringkat
- User Manual - AQIS Application - TGS - Version 1.0Dokumen35 halamanUser Manual - AQIS Application - TGS - Version 1.0sunru24Belum ada peringkat
- DSMA Module 3Dokumen67 halamanDSMA Module 3Sheri Abhishek ReddyBelum ada peringkat
- Socio Economic Conditions of Migrant LabourDokumen7 halamanSocio Economic Conditions of Migrant LabourDR SEKHARBelum ada peringkat
- Aircraft Tyre Maintenance - SKYbrary Aviation SafetyDokumen8 halamanAircraft Tyre Maintenance - SKYbrary Aviation Safetynosh1983Belum ada peringkat
- Soft-Starter: Programming ManualDokumen162 halamanSoft-Starter: Programming ManualThaylo PiresBelum ada peringkat
- C PM 71.v2016-12-11 PDFDokumen31 halamanC PM 71.v2016-12-11 PDFbobi2201Belum ada peringkat
- Basic Task 315Dokumen9 halamanBasic Task 315gaikwadamitag1Belum ada peringkat
- Art & Science: Meeting The Needs of Patients' Families in Intensive Care UnitsDokumen8 halamanArt & Science: Meeting The Needs of Patients' Families in Intensive Care UnitsRiaBelum ada peringkat
- Introduction EthicsDokumen26 halamanIntroduction EthicsLawrence MarquezBelum ada peringkat
- Chapter 4 Calculations ANSWERSDokumen2 halamanChapter 4 Calculations ANSWERSmollicksoham2907Belum ada peringkat
- VisualizationDokumen4 halamanVisualizationspanglemaker3719349Belum ada peringkat
- Collimation of Binoculars With A LampDokumen33 halamanCollimation of Binoculars With A LampchristianBelum ada peringkat
- Probability of Event Intersections: Vietnamese-German UniversityDokumen17 halamanProbability of Event Intersections: Vietnamese-German UniversityĐặng ThưBelum ada peringkat
- Mars Climate Orbiter ReportDokumen27 halamanMars Climate Orbiter Reportbiguelo100% (1)
- Creativity MCQDokumen17 halamanCreativity MCQAmanVatsBelum ada peringkat
- 10 AI Summer Vacation HWDokumen2 halaman10 AI Summer Vacation HWAyushi SinghBelum ada peringkat
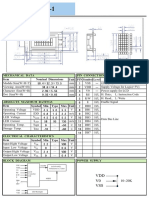
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDokumen1 halamanV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriBelum ada peringkat
- BA427 Chapter 7Dokumen11 halamanBA427 Chapter 7Maloloy-on, JeromeBelum ada peringkat
- The Ultimate Guide To The Gemba WalkDokumen9 halamanThe Ultimate Guide To The Gemba WalkĐan VũBelum ada peringkat
- Materi 2 - Obligation, Prohibition, and Suggestion - AdviceDokumen12 halamanMateri 2 - Obligation, Prohibition, and Suggestion - AdviceShadrina ChaerunissaBelum ada peringkat
- Technical Seminar Report CV94Dokumen62 halamanTechnical Seminar Report CV941MS19CV053 KARTHIK B SBelum ada peringkat
- MLA 7th Edition Formatting and Style GuideDokumen14 halamanMLA 7th Edition Formatting and Style Guideapi-301781586Belum ada peringkat
- Vocabulary Placement TestDokumen3 halamanVocabulary Placement TestMonica Vergara MejiaBelum ada peringkat
- Original Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwDokumen32 halamanOriginal Instructions Alkuperäiset Ohjeet Αρχικýj Οδηγßεj: Rev. 4 5/31/11 BrwnikosvitalBelum ada peringkat
- DSO Digital Storage Oscilloscope: ApplicationDokumen2 halamanDSO Digital Storage Oscilloscope: ApplicationmsequipmentsBelum ada peringkat
- S&S PDFDokumen224 halamanS&S PDFMohammed MateenBelum ada peringkat
- Indian Standard: Methods of Test For Aggregates For ConcreteDokumen22 halamanIndian Standard: Methods of Test For Aggregates For ConcreteAnuradhaPatraBelum ada peringkat
- Lecture Notes 10: Fading Channels ModelsDokumen19 halamanLecture Notes 10: Fading Channels ModelsayushBelum ada peringkat
- Arts NPSH TutorialDokumen3 halamanArts NPSH TutorialDidier SanonBelum ada peringkat