Anda mungkin juga menyukai
- An Invariance Principle in The Theory of StabilityDokumen12 halamanAn Invariance Principle in The Theory of StabilitycastrojpBelum ada peringkat
- Calculating Arakawa JacobianDokumen3 halamanCalculating Arakawa Jacobianmak112005gmailBelum ada peringkat
- E - Mastering Lighting in TurboCAD v11Dokumen195 halamanE - Mastering Lighting in TurboCAD v11Rudl1Belum ada peringkat
- Thompson. Imperial KnowledgeDokumen55 halamanThompson. Imperial KnowledgeAngelik VasquezBelum ada peringkat
- Memoria Flash SST25VF032BDokumen33 halamanMemoria Flash SST25VF032Bfrank_grimesBelum ada peringkat
- Open Collector Outputs - Signet Sensors PDFDokumen4 halamanOpen Collector Outputs - Signet Sensors PDFfrank_grimesBelum ada peringkat
- A Perspective On Artificial Intelligence in ManufacturingDokumen142 halamanA Perspective On Artificial Intelligence in Manufacturingzx l100% (2)
- Introduction To Software Testing Life CycleDokumen11 halamanIntroduction To Software Testing Life CycleKirti UpadhyayBelum ada peringkat
- 1 Lyapunov Stability TheoryDokumen11 halaman1 Lyapunov Stability TheoryajmaltkBelum ada peringkat
- J. P. Lasalle - Paper Original - An Invariance Principle in The Theory of Stability (1966)Dokumen20 halamanJ. P. Lasalle - Paper Original - An Invariance Principle in The Theory of Stability (1966)Ruben HdzBelum ada peringkat
- Quantum Cosmology (1984)Dokumen49 halamanQuantum Cosmology (1984)oldmanbearsBelum ada peringkat
- Isochronous PotentialsDokumen11 halamanIsochronous Potentialsdertweasr100% (1)
- Frequency-Modulated Continuous Wave Ranging: Basic PrincipleDokumen9 halamanFrequency-Modulated Continuous Wave Ranging: Basic PrinciplePedro IvanBelum ada peringkat
- Aspects of Quantum Field Theory - PadmanabhanDokumen96 halamanAspects of Quantum Field Theory - PadmanabhanSupritsingh100% (1)
- P A M Dirac - On The Analogy Between Classical and Quantum MechanicsDokumen5 halamanP A M Dirac - On The Analogy Between Classical and Quantum MechanicsdomaninaBelum ada peringkat
- An Invitation To Von Neumann AlgebrasDokumen186 halamanAn Invitation To Von Neumann AlgebrasDietethique100% (1)
- 9 Quantum Field Theory For ChildrenDokumen8 halaman9 Quantum Field Theory For ChildrenAnonymous SGezgEN8DWBelum ada peringkat
- Esmond-Murty-Problems in Algebraic Number TheoryDokumen150 halamanEsmond-Murty-Problems in Algebraic Number TheoryMilos TomicBelum ada peringkat
- Introductory Notes On Richard Thompson's GroupsDokumen25 halamanIntroductory Notes On Richard Thompson's GroupsNooneBelum ada peringkat
- V. I. Arnold Dynamics, Statistics and Projective Geometry of Galois FieldsDokumen88 halamanV. I. Arnold Dynamics, Statistics and Projective Geometry of Galois FieldsSean Patrick WalshBelum ada peringkat
- Pol Chin Ski - Solutions To Problems From Pol Chin Ski String TheoryDokumen115 halamanPol Chin Ski - Solutions To Problems From Pol Chin Ski String Theoryannonymous1Belum ada peringkat
- General Conformable Fractional Derivative and Its Physical InterpretationDokumen16 halamanGeneral Conformable Fractional Derivative and Its Physical InterpretationponcoBelum ada peringkat
- Algebra of Vector FieldsDokumen4 halamanAlgebra of Vector FieldsVladimir LubyshevBelum ada peringkat
- Branching ProcessesDokumen15 halamanBranching ProcessesPatrick MugoBelum ada peringkat
- Chapter2 PDFDokumen159 halamanChapter2 PDFShishir DasikaBelum ada peringkat
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDokumen20 halamanOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveBelum ada peringkat
- Lectures On Lie Groups and Representations of Locally Compact GroupsDokumen140 halamanLectures On Lie Groups and Representations of Locally Compact GroupsDrgsmr ReddyBelum ada peringkat
- E The Master of AllDokumen12 halamanE The Master of AllchungBelum ada peringkat
- Inverse and Implicit Function TheoremDokumen4 halamanInverse and Implicit Function TheoremkelvinlBelum ada peringkat
- Types of Integral EquationsDokumen5 halamanTypes of Integral EquationsIL Kook SongBelum ada peringkat
- Emii17sol 2 PDFDokumen24 halamanEmii17sol 2 PDFJesus Antonio Jimenez AriasBelum ada peringkat
- Diffy Qs 1st Order Linear de Lec (2) (1) ApatDokumen19 halamanDiffy Qs 1st Order Linear de Lec (2) (1) ApatClaire G. MagluyanBelum ada peringkat
- Boris Khesin - Topological Fluid DynamicsDokumen11 halamanBoris Khesin - Topological Fluid DynamicsPlamcfeBelum ada peringkat
- Louis H. Kauffman - Remarks On Formal Knot TheoryDokumen37 halamanLouis H. Kauffman - Remarks On Formal Knot TheoryOkommBelum ada peringkat
- Airy FunctionDokumen6 halamanAiry Functionmenonita89Belum ada peringkat
- Primes and RiemannDokumen9 halamanPrimes and RiemanndiallomailBelum ada peringkat
- Bricmont, J. (2017) - Quantum Sense and Nonsense. Basel Springer (c31)Dokumen287 halamanBricmont, J. (2017) - Quantum Sense and Nonsense. Basel Springer (c31)pashaiiiiBelum ada peringkat
- Helgason - Sophus Lie, The MathematicianDokumen19 halamanHelgason - Sophus Lie, The MathematicianZow Niak100% (1)
- Appendix C Lorentz Group and The Dirac AlgebraDokumen13 halamanAppendix C Lorentz Group and The Dirac AlgebraapuntesfisymatBelum ada peringkat
- Berry Phase Patrick BrunoDokumen33 halamanBerry Phase Patrick Brunodyegu1Belum ada peringkat
- Complex NumbersDokumen12 halamanComplex NumbersSanjoy Brahma100% (1)
- JMathPhys 31 725 (Lee and Wald)Dokumen19 halamanJMathPhys 31 725 (Lee and Wald)Juan PerezBelum ada peringkat
- (Dan Coffey, Carole Thornley) Globalization and Varieties of Capitalism - New Labour, Economic Policy and The Abject StateDokumen199 halaman(Dan Coffey, Carole Thornley) Globalization and Varieties of Capitalism - New Labour, Economic Policy and The Abject StateEsteban AriasBelum ada peringkat
- Copula StatisticsDokumen8 halamanCopula StatisticsUmadineBelum ada peringkat
- Einstein's Equations and Clifford Algebra - Patrick R. GirardDokumen6 halamanEinstein's Equations and Clifford Algebra - Patrick R. GirardAndres GranadosBelum ada peringkat
- Complex Analysis With ApplicationsDokumen156 halamanComplex Analysis With ApplicationsKyle ConnisonBelum ada peringkat
- Pseudoparticle Solutions of The Yang-Mills EquationsDokumen3 halamanPseudoparticle Solutions of The Yang-Mills EquationsGleb Ananyev100% (1)
- Semi Simplicial Complexes and Singular HomologyDokumen16 halamanSemi Simplicial Complexes and Singular Homologyblexim100% (1)
- Identities For Complete Homogeneous Symmetric PolynomialsDokumen10 halamanIdentities For Complete Homogeneous Symmetric PolynomialsE Frank CorneliusBelum ada peringkat
- 2016 Complex Analysis Problems SolutionsDokumen102 halaman2016 Complex Analysis Problems Solutionsas_5kBelum ada peringkat
- Penrose DiagramsDokumen9 halamanPenrose Diagramsbastian_wolfBelum ada peringkat
- The General Problem of Stability of MotionDokumen18 halamanThe General Problem of Stability of MotionlmORphlBelum ada peringkat
- Complex PotentialDokumen2 halamanComplex PotentialAshvin Grace100% (1)
- Unit 4: Linear Transformation: V T U T V U T U CT Cu TDokumen28 halamanUnit 4: Linear Transformation: V T U T V U T U CT Cu TFITSUM SEIDBelum ada peringkat
- (Silberberg, E.) The Le Chatelier Principle As A Corollary To A Generalized Envelope TheoremDokumen10 halaman(Silberberg, E.) The Le Chatelier Principle As A Corollary To A Generalized Envelope Theoremlev76Belum ada peringkat
- An Argand Diagram For Two by Two MatricesDokumen9 halamanAn Argand Diagram For Two by Two MatricesElias Costa GrivoyannisBelum ada peringkat
- 2014 08 29 Quotient SpacesDokumen25 halaman2014 08 29 Quotient SpacesultimouniversoBelum ada peringkat
- MATH2045: Vector Calculus & Complex Variable TheoryDokumen50 halamanMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Lyapunov Function - Dynamical SystemsDokumen4 halamanLyapunov Function - Dynamical SystemsmCmAlBelum ada peringkat
- Lyapunov On WikipediaDokumen8 halamanLyapunov On WikipediaElizabeth JohnsBelum ada peringkat
- Accurate TMR0 InterruptsDokumen6 halamanAccurate TMR0 Interruptsfrank_grimesBelum ada peringkat
- PIC18F46J50Dokumen562 halamanPIC18F46J50frank_grimesBelum ada peringkat
- PIC18F46J50 ErrataDokumen12 halamanPIC18F46J50 Erratafrank_grimesBelum ada peringkat
- Pic 16 F 877 ADokumen688 halamanPic 16 F 877 ApvylaleBelum ada peringkat
- How To Recalibrate A PICDokumen3 halamanHow To Recalibrate A PICfrank_grimesBelum ada peringkat
- 01028BDokumen10 halaman01028Bjohn100% (1)
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Dokumen1 halamanPassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesBelum ada peringkat
- Assignment 1Dokumen6 halamanAssignment 1frank_grimesBelum ada peringkat
- Booksim 2.0 User'S GuideDokumen10 halamanBooksim 2.0 User'S GuideSourav SatpathyBelum ada peringkat
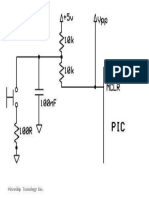
- MCLR Reset CircuitDokumen1 halamanMCLR Reset Circuitfrank_grimesBelum ada peringkat
- HD44780Dokumen60 halamanHD44780nzltfBelum ada peringkat
- Receptor Infrarrojo Tsop382Dokumen7 halamanReceptor Infrarrojo Tsop382frank_grimesBelum ada peringkat
- PICDokumen46 halamanPICNguyen Minh TuBelum ada peringkat
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Dokumen3 halaman2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesBelum ada peringkat
- Stepping Motors FundamentalsDokumen22 halamanStepping Motors Fundamentalsvishnukarthick108Belum ada peringkat
- Constants FormulasDokumen1 halamanConstants FormulasMensajes De Texto GratisBelum ada peringkat
- Lecture 1 - Manufacturing Process and Process ControlDokumen8 halamanLecture 1 - Manufacturing Process and Process Controlfrank_grimesBelum ada peringkat
- Exercise1 AssignmentDokumen5 halamanExercise1 Assignmentfrank_grimesBelum ada peringkat
- Lecture 2 PDFDokumen56 halamanLecture 2 PDFfrank_grimesBelum ada peringkat
- Garnet TutorialDokumen42 halamanGarnet Tutorialfrank_grimesBelum ada peringkat
- B BKZ Hyd Il 2 CDokumen12 halamanB BKZ Hyd Il 2 Cfrank_grimesBelum ada peringkat
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDokumen27 halamanUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesBelum ada peringkat
- B BKZ Hyd Il 2 CDokumen12 halamanB BKZ Hyd Il 2 Cfrank_grimesBelum ada peringkat
- B BKZ Hyd Il 2 CDokumen12 halamanB BKZ Hyd Il 2 Cfrank_grimesBelum ada peringkat
- DSDokumen18 halamanDSrojo_32100% (1)
- Structure: Study Guide Block 1:vector ArithmeticDokumen6 halamanStructure: Study Guide Block 1:vector Arithmeticfrank_grimesBelum ada peringkat
- MITRES 18 007 Parti Lec01 PDFDokumen15 halamanMITRES 18 007 Parti Lec01 PDFfrank_grimesBelum ada peringkat
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDokumen12 halamanMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesBelum ada peringkat
- Final Project - EEL 4657L - PLC Traffic IntersectionDokumen8 halamanFinal Project - EEL 4657L - PLC Traffic Intersectionstmco123Belum ada peringkat
- PLC Vs PACDokumen2 halamanPLC Vs PACPandaGendutBelum ada peringkat
- Interview Questions Manual SeedDokumen2 halamanInterview Questions Manual SeedShailesh JackBelum ada peringkat
- Automation Test Framework - StudiedDokumen3 halamanAutomation Test Framework - StudiedSundaravadani SelvakumaranBelum ada peringkat
- PC100Dokumen14 halamanPC100MAX PAYNEBelum ada peringkat
- Towards A Definition of Tourism, Tourist, and The Tourist IndustryDokumen18 halamanTowards A Definition of Tourism, Tourist, and The Tourist IndustryKimmy2010Belum ada peringkat
- Acoustic Echo Cancellation Using Conventional Adaptive Algorithms and Modified Variable Step Size Lms AlgorithmDokumen100 halamanAcoustic Echo Cancellation Using Conventional Adaptive Algorithms and Modified Variable Step Size Lms Algorithmjsnmay27Belum ada peringkat
- AUP - Raman RamsinDokumen17 halamanAUP - Raman RamsinLuis Levano AcostaBelum ada peringkat
- McLeod CH07Dokumen50 halamanMcLeod CH07Abdul LatifBelum ada peringkat
- Requirment Elicitation Issues and Techniques For Requirement ElicitationDokumen5 halamanRequirment Elicitation Issues and Techniques For Requirement ElicitationFaizan KhanBelum ada peringkat
- DMGS Pri 649565Dokumen17 halamanDMGS Pri 649565SURYATAPA MONDALBelum ada peringkat
- Course Outcome and Program Outcome For Course Control System EngineeringDokumen7 halamanCourse Outcome and Program Outcome For Course Control System Engineeringralu_mnbBelum ada peringkat
- FSCAE ISO26262 E AgendaDokumen3 halamanFSCAE ISO26262 E Agendanhmphuc1412Belum ada peringkat
- Top 50 Manual Testing Interview Questions and Answers in 2022 - EdurekaDokumen13 halamanTop 50 Manual Testing Interview Questions and Answers in 2022 - Edurekathirumal ReddyBelum ada peringkat
- Pdvsa: Engineering Design ManualDokumen6 halamanPdvsa: Engineering Design Manual20jose12luisBelum ada peringkat
- Dayananda Sagar College of Engineering UG Continuous Internal Assessment - IDokumen1 halamanDayananda Sagar College of Engineering UG Continuous Internal Assessment - Idaponnaswami07gmailcBelum ada peringkat
- Chapter 2.1 The First Law of ThermodynamicsDokumen13 halamanChapter 2.1 The First Law of ThermodynamicssyafiqzainordinBelum ada peringkat
- SOTWARE ENGINEERING-case Tools LabDokumen2 halamanSOTWARE ENGINEERING-case Tools Labmuhammadkamran05100% (1)
- Thermal Physics Lecture NotesDokumen57 halamanThermal Physics Lecture NotesHuzaifa Lawan Musa0% (1)
- System Requirements Specification For The SynergySoft™ Distributed Meeting SchedulerDokumen18 halamanSystem Requirements Specification For The SynergySoft™ Distributed Meeting SchedulerSindhu TalrejaBelum ada peringkat
- Chapter 2Dokumen44 halamanChapter 2Bikila SeketaBelum ada peringkat
- Tank Level ControlDokumen5 halamanTank Level ControlSimon CalloBelum ada peringkat
- New Developments in Industrial MPC Identification Yucai ZhuDokumen8 halamanNew Developments in Industrial MPC Identification Yucai ZhuAlongkorn JaranchonBelum ada peringkat
- Introduction To ThermodynamicsDokumen16 halamanIntroduction To ThermodynamicsFarouk BassaBelum ada peringkat
- Guided NotesDokumen6 halamanGuided Notesapi-449009978Belum ada peringkat
- Australasian Data Science and Machine Learning ConferenceDokumen15 halamanAustralasian Data Science and Machine Learning ConferenceAnand PaulBelum ada peringkat
- Software Risk Checklist - Department of Defense - NASA - USADokumen24 halamanSoftware Risk Checklist - Department of Defense - NASA - USAFernando Santucci100% (2)