Anda mungkin juga menyukai
- Lect Acceleration AnalysisDokumen107 halamanLect Acceleration AnalysisTalha Khanzada100% (1)
- Velocity and AccelartionDokumen56 halamanVelocity and Accelartionadus lakshmanBelum ada peringkat
- Acceleration Analysis of MechanismsDokumen32 halamanAcceleration Analysis of MechanismsThahir Shah100% (1)
- Velocity Analysis of LinkagesDokumen23 halamanVelocity Analysis of Linkagesaddisudagne67% (3)
- KOM MechanismsDokumen20 halamanKOM MechanismsRamanathan DuraiBelum ada peringkat
- Kom Unit-IDokumen18 halamanKom Unit-IRamanathan DuraiBelum ada peringkat
- BrakesDokumen62 halamanBrakesTarun Surya KatreddyBelum ada peringkat
- Belts and PulleysDokumen17 halamanBelts and PulleysMelindaBelum ada peringkat
- Vibration TwoDokumen20 halamanVibration TwoFeeling_so_flyBelum ada peringkat
- Acceleration Analysis MethodDokumen12 halamanAcceleration Analysis MethodKlucifer XinBelum ada peringkat
- Turning Moment Diagrams PDFDokumen20 halamanTurning Moment Diagrams PDFMohammad Rahat Rahman100% (1)
- Tom-I Question Bank UpdatedDokumen174 halamanTom-I Question Bank Updatedkiran_wakchaureBelum ada peringkat
- Relative MotionDokumen3 halamanRelative Motionkaushik247Belum ada peringkat
- Machine Elements: Friction and ClutchesDokumen19 halamanMachine Elements: Friction and ClutchesRamanathan DuraiBelum ada peringkat
- Machine Design 2Dokumen255 halamanMachine Design 2Цедіе Рамос100% (1)
- Gears Terms GuideDokumen8 halamanGears Terms GuideKevin JoeBelum ada peringkat
- Theory of Machinary-1 PDFDokumen258 halamanTheory of Machinary-1 PDFPriya KumarBelum ada peringkat
- ME2352-DTS Question BankDokumen8 halamanME2352-DTS Question BankNaresh015Belum ada peringkat
- DTS Unit 5Dokumen20 halamanDTS Unit 5Muthuvel MBelum ada peringkat
- Machine Design IIDokumen23 halamanMachine Design IIBinar Arum OktaviaBelum ada peringkat
- Unit5-Gear TrainsDokumen18 halamanUnit5-Gear TrainsGokulraju RangasamyBelum ada peringkat
- Rotational MotionDokumen4 halamanRotational MotionWraith KingBelum ada peringkat
- Static and Dynamic Balancing: Experiment#2Dokumen4 halamanStatic and Dynamic Balancing: Experiment#2Maqbool Khan100% (1)
- Cam and Follower - pptx-1Dokumen24 halamanCam and Follower - pptx-1Syam Raju50% (2)
- Winter 2018-19 Mechanical Engineering Cam KinematicsDokumen35 halamanWinter 2018-19 Mechanical Engineering Cam KinematicsAnurag JenaBelum ada peringkat
- Harmonically Excitation VibrationDokumen17 halamanHarmonically Excitation VibrationCherry ObiasBelum ada peringkat
- Md-14 Belt and Chain DrivesDokumen8 halamanMd-14 Belt and Chain DrivesRemartin MaglantayBelum ada peringkat
- Machine Design Examination 3Dokumen5 halamanMachine Design Examination 3SYBRELLE CRUZBelum ada peringkat
- Machine Elements Quiz 1Dokumen17 halamanMachine Elements Quiz 1Quen CuestaBelum ada peringkat
- Machine Design II Homework Spring SolutionsDokumen13 halamanMachine Design II Homework Spring SolutionsMuhammad Yasin100% (1)
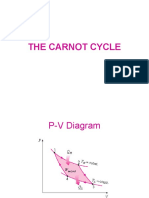
- The Carnot CycleDokumen9 halamanThe Carnot CyclePatrick Antonio Orge ChingBelum ada peringkat
- Types of Cams GuideDokumen21 halamanTypes of Cams GuideHarikrishna ShenoyBelum ada peringkat
- E. v. v. Ramanamurthy, S. Ramachandran-Design of Transmission Systems-Air Walk Publ. (2015)Dokumen1.038 halamanE. v. v. Ramanamurthy, S. Ramachandran-Design of Transmission Systems-Air Walk Publ. (2015)Anonymous BrraRVdvv383% (18)
- Kinematics of Machinery NotesDokumen65 halamanKinematics of Machinery NotesVenkatesh Rajamani100% (1)
- Kinematics of MachinesDokumen40 halamanKinematics of MachinesAravind MuddebihalBelum ada peringkat
- Kinema TicsDokumen61 halamanKinema TicsApex Institute33% (6)
- Hooke's ExperimentDokumen9 halamanHooke's ExperimentUmange Ranasinghe67% (3)
- Graphical SynthesisDokumen58 halamanGraphical SynthesisAnas Asif100% (2)
- Lecture 11 Thermal Ii (14 .07.2020)Dokumen26 halamanLecture 11 Thermal Ii (14 .07.2020)Dr. BIBIN CHIDAMBARANATHANBelum ada peringkat
- What Is The Basic Concept of VibrationDokumen5 halamanWhat Is The Basic Concept of VibrationVimal WoosyeBelum ada peringkat
- Chapter 1 Mechanisms of MachineryDokumen34 halamanChapter 1 Mechanisms of MachineryFira tubeBelum ada peringkat
- Kinematics of Cams: Cams With Different Follower MotionDokumen76 halamanKinematics of Cams: Cams With Different Follower MotionMPee Finance SumerpurBelum ada peringkat
- ME6601-Design of Transmission SystemsDokumen16 halamanME6601-Design of Transmission SystemsSecret SecretBelum ada peringkat
- Fundamentals of Stress Analysis ConclusionDokumen11 halamanFundamentals of Stress Analysis ConclusionAbdel Hamied EbrahemBelum ada peringkat
- Design of Helical GearsDokumen10 halamanDesign of Helical GearsKarthik SBelum ada peringkat
- Vibration Under General Forcing ConditionsDokumen48 halamanVibration Under General Forcing ConditionsEpimerianos AberianosBelum ada peringkat
- Unit 5Dokumen84 halamanUnit 5Prasanna Sekar100% (1)
- Fluid Statics - Problems and Solutions - Solved Problems in Basic PhysicsDokumen12 halamanFluid Statics - Problems and Solutions - Solved Problems in Basic PhysicsEsther oluwatosin AdeyemiBelum ada peringkat
- Assignment-5 (Gear Train)Dokumen2 halamanAssignment-5 (Gear Train)Mohd Javed IqbalBelum ada peringkat
- Machine Elements: Cams: Group 7 Charlie Dionisio R - Jhun Lemos Jerphoenix Mullaneda Arsilio SilverioDokumen21 halamanMachine Elements: Cams: Group 7 Charlie Dionisio R - Jhun Lemos Jerphoenix Mullaneda Arsilio SilverioDeniell Joyce MarquezBelum ada peringkat
- Kinematics of MachineryDokumen65 halamanKinematics of Machinerykumaravel07Belum ada peringkat
- Friction Clutches PDFDokumen14 halamanFriction Clutches PDFamanmittal0850% (2)
- Vibration response to general forcingDokumen19 halamanVibration response to general forcingLloyd LorescoBelum ada peringkat
- Experiment No 5 The DC Series MotorDokumen6 halamanExperiment No 5 The DC Series MotorMadel Roque50% (2)
- 77-4 Worm GearDokumen9 halaman77-4 Worm Gearrip111176Belum ada peringkat
- Different Kinds of MechanismsDokumen31 halamanDifferent Kinds of Mechanismslockenload92% (13)
- VELOCITY AND ACCELERATION ANALYSISDokumen60 halamanVELOCITY AND ACCELERATION ANALYSIStarasasankaBelum ada peringkat
- Linear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallDokumen24 halamanLinear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallKarthikeyanRamanujamBelum ada peringkat
- MECHANISM MOTIONDokumen31 halamanMECHANISM MOTIONhamryBelum ada peringkat
- Handbook of Power Systems Engineering with Power Electronics ApplicationsDari EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsBelum ada peringkat
- Constitution of AlloysDokumen23 halamanConstitution of AlloysRamanathan Durai100% (1)
- HMT Unit 1Dokumen129 halamanHMT Unit 1Ramanathan Durai100% (4)
- DOM Unit-IDokumen48 halamanDOM Unit-IRamanathan DuraiBelum ada peringkat
- Kom Unit-IDokumen18 halamanKom Unit-IRamanathan DuraiBelum ada peringkat
- DESIGN of Riveted JointsDokumen12 halamanDESIGN of Riveted JointsRamanathan DuraiBelum ada peringkat
- Setting up a Local Area Network for a School of BusinessDokumen40 halamanSetting up a Local Area Network for a School of BusinessRamanathan DuraiBelum ada peringkat
- CIM Lecture Notes 2Dokumen10 halamanCIM Lecture Notes 2ganni1999Belum ada peringkat
- CIM Benefits and AdvantagesDokumen16 halamanCIM Benefits and AdvantagesKannan Sreenivasan100% (1)
- Machine Elements: Friction and ClutchesDokumen19 halamanMachine Elements: Friction and ClutchesRamanathan DuraiBelum ada peringkat
- Muff Coupling & Split Muff CouplingDokumen19 halamanMuff Coupling & Split Muff CouplingRamanathan DuraiBelum ada peringkat
- Mod1 Mechatronics and Manufacturing Automation PDFDokumen17 halamanMod1 Mechatronics and Manufacturing Automation PDFthebetterman0511Belum ada peringkat
- The FutureDokumen12 halamanThe FutureRamanathan DuraiBelum ada peringkat
- Gear BoxDokumen29 halamanGear BoxSheikh Zakir100% (1)
- Key& CouplingsDokumen7 halamanKey& CouplingsRamanathan DuraiBelum ada peringkat
- Unit 2Dokumen49 halamanUnit 2Ramanathan DuraiBelum ada peringkat
- 2 StrokeDokumen10 halaman2 StrokeKoustove Moni BorthakurBelum ada peringkat
- Mechatronics Systems PDFDokumen23 halamanMechatronics Systems PDFRamanathan DuraiBelum ada peringkat
- DESIGN of Riveted JointsDokumen12 halamanDESIGN of Riveted JointsRamanathan DuraiBelum ada peringkat
- Sri Vidya College Mechatronics Lecture Notes Building BlocksDokumen19 halamanSri Vidya College Mechatronics Lecture Notes Building BlocksRamanathan DuraiBelum ada peringkat
- Presentation 1Dokumen1 halamanPresentation 1Ramanathan DuraiBelum ada peringkat
- Mechatronics Systems PDFDokumen23 halamanMechatronics Systems PDFRamanathan DuraiBelum ada peringkat
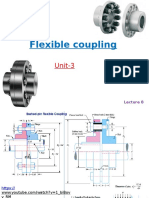
- Flexible CouplingDokumen5 halamanFlexible CouplingRamanathan DuraiBelum ada peringkat
- Anna University:: Chennai: III Cycle Test-April'2016-Final Year Mechanical EngineeringDokumen1 halamanAnna University:: Chennai: III Cycle Test-April'2016-Final Year Mechanical EngineeringRamanathan DuraiBelum ada peringkat
- Key& CouplingsDokumen7 halamanKey& CouplingsRamanathan DuraiBelum ada peringkat
- Unit 1Dokumen27 halamanUnit 1Ramanathan DuraiBelum ada peringkat
- Design of Fasteners and Welded JointsDokumen8 halamanDesign of Fasteners and Welded JointsRamanathan DuraiBelum ada peringkat
- ME2308 - LML MM LabDokumen56 halamanME2308 - LML MM LabRamanathan DuraiBelum ada peringkat
- Engineering Metrology and Measurements Lab ME6513Dokumen26 halamanEngineering Metrology and Measurements Lab ME6513Ramanathan DuraiBelum ada peringkat
- Micrometer Calibration Using Slip GaugesDokumen6 halamanMicrometer Calibration Using Slip GaugesMachineryeng67% (6)
- Ballistic Particle Manufacturing (BPM)Dokumen15 halamanBallistic Particle Manufacturing (BPM)Senaka BandaraBelum ada peringkat
- Cours Acide-Base en English PDFDokumen22 halamanCours Acide-Base en English PDFالغزيزال الحسن EL GHZIZAL HassaneBelum ada peringkat
- T6818DP04 PDFDokumen5 halamanT6818DP04 PDFwaleed ayeshBelum ada peringkat
- LS Dyna Crack PDFDokumen28 halamanLS Dyna Crack PDFEren KalayBelum ada peringkat
- Combinatorial Group Theory PDFDokumen2 halamanCombinatorial Group Theory PDFCarlos0% (1)
- Tecnoelettra Catalog EnuDokumen44 halamanTecnoelettra Catalog EnuBojan KitanovskiBelum ada peringkat
- Crane - Flow of Fluids Through Valves, Fittings and Pipe (1986) by CraneDokumen131 halamanCrane - Flow of Fluids Through Valves, Fittings and Pipe (1986) by CranesnamprogBelum ada peringkat
- TunnelDokumen87 halamanTunnelRejith SomanBelum ada peringkat
- Prerequ QFTDokumen1 halamanPrerequ QFTHassan FawazBelum ada peringkat
- General Physics 2 Electric FieldDokumen28 halamanGeneral Physics 2 Electric FieldAriah KaliBelum ada peringkat
- D5035 11 Breaking Force and Elongation of Textile Fabrics (Strip Method)Dokumen8 halamanD5035 11 Breaking Force and Elongation of Textile Fabrics (Strip Method)Raj SontakkeBelum ada peringkat
- Biology of Tooth Movement Phases and Forces (BMTPDokumen21 halamanBiology of Tooth Movement Phases and Forces (BMTPRukshad Asif Jaman KhanBelum ada peringkat
- Led Bulbs CatalogueDokumen30 halamanLed Bulbs CatalogueleedarsonlightingBelum ada peringkat
- Chapter 5Dokumen2 halamanChapter 5farhansuperfyenBelum ada peringkat
- 53 Tutorial Mouse enDokumen15 halaman53 Tutorial Mouse enh_eijy2743Belum ada peringkat
- STOKES DRAG Derivation PDFDokumen4 halamanSTOKES DRAG Derivation PDFVadiraj HemadriBelum ada peringkat
- Finding the Area of Circular Sectors and their Real-World ApplicationsDokumen4 halamanFinding the Area of Circular Sectors and their Real-World ApplicationsPaula Jan100% (5)
- Integrated Science BKDokumen712 halamanIntegrated Science BKFrancis TpowerBelum ada peringkat
- Sizing Calculations of Thrust BlocksDokumen5 halamanSizing Calculations of Thrust BlocksElvis Gray83% (6)
- Power Estimation Methods For Sequential Logic Circuits: Pedram, M. DespainDokumen13 halamanPower Estimation Methods For Sequential Logic Circuits: Pedram, M. DespainHeejung SoBelum ada peringkat
- Phase Rule - Phase Diagram - Lever Rule - Microstructural Development During Slow CoolingDokumen35 halamanPhase Rule - Phase Diagram - Lever Rule - Microstructural Development During Slow CoolingSiratullah ShahBelum ada peringkat
- Telpro Data Sheets 2014 PDFDokumen26 halamanTelpro Data Sheets 2014 PDFrakacyuBelum ada peringkat
- Analog Electronics Assignment SolutionsDokumen2 halamanAnalog Electronics Assignment SolutionsHeena FarooqBelum ada peringkat
- 6 Programming With MATLAB PDFDokumen66 halaman6 Programming With MATLAB PDFAugusto De La Cruz CamayoBelum ada peringkat
- TDT-172718DE-65F Adjustable Electrical Downtilt AntennaDokumen1 halamanTDT-172718DE-65F Adjustable Electrical Downtilt AntennaAnonymous ZlPONGBelum ada peringkat
- Mechanisms for indexing, positioning and interlockingDokumen122 halamanMechanisms for indexing, positioning and interlockingRolffoTelloBelum ada peringkat
- PDS Nynas Nytro LibraDokumen2 halamanPDS Nynas Nytro LibraGilbert Pineda100% (1)
- PROJCTDokumen32 halamanPROJCTSwati Agarwal100% (1)
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDokumen41 halamanWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsGustavoBelum ada peringkat