Anda mungkin juga menyukai
- Routing in Telephone NetworkDokumen27 halamanRouting in Telephone NetworkAmanuel Tadele0% (2)
- DTMF Based DC Motor Speed and Direction ControlDokumen4 halamanDTMF Based DC Motor Speed and Direction Controlsrinivas raoBelum ada peringkat
- Seminar Report On SDMADokumen13 halamanSeminar Report On SDMAdarpansinghalBelum ada peringkat
- Switching Systems-Lecture3Dokumen34 halamanSwitching Systems-Lecture3Jumanne Ally0% (1)
- Unit 4 Satellite AccessDokumen23 halamanUnit 4 Satellite AccessSoundararajan RajagopalanBelum ada peringkat
- The Network Layer: Andrew S. Tanenbaum Computer Networks Fourth Edition PP. 343-396Dokumen82 halamanThe Network Layer: Andrew S. Tanenbaum Computer Networks Fourth Edition PP. 343-396Ss ShetBelum ada peringkat
- Unit V Satellite Applications: INTELSAT SeriesDokumen76 halamanUnit V Satellite Applications: INTELSAT SeriesHemalatha NatarajanBelum ada peringkat
- L-2 GEPON System (Teracom)Dokumen20 halamanL-2 GEPON System (Teracom)ashishjain_bsnl2033Belum ada peringkat
- Demand Assigned Multiple AccessDokumen22 halamanDemand Assigned Multiple Accessanushka shastriBelum ada peringkat
- Echo Cancellation Project ProposalDokumen2 halamanEcho Cancellation Project ProposalmidhunBelum ada peringkat
- Telecommunication SwitchingDokumen203 halamanTelecommunication SwitchingAbDalla YabarowBelum ada peringkat
- WDM Technologies: Passive Optical ComponentsDari EverandWDM Technologies: Passive Optical ComponentsAchyut K. DuttaBelum ada peringkat
- Ec7101-Telecommunication Switching Circuits & NetworksDokumen8 halamanEc7101-Telecommunication Switching Circuits & NetworksAbhijeet BishtBelum ada peringkat
- Overview of MicrowaveDokumen39 halamanOverview of MicrowaveNavi NaviBelum ada peringkat
- Dipole Simulation Using ANSYS EDTDokumen37 halamanDipole Simulation Using ANSYS EDTNix FaineBelum ada peringkat
- Basic Electronic: V S Imbulpitiya Instructor (Electronic) BSC Electronic and Automation TechnologyDokumen14 halamanBasic Electronic: V S Imbulpitiya Instructor (Electronic) BSC Electronic and Automation TechnologyVindya ImbulpitiyaBelum ada peringkat
- Diversity Combining TechniquesDokumen9 halamanDiversity Combining Techniquesハンター ジェイソンBelum ada peringkat
- Unit V Ststem Examples & Design IssuesDokumen104 halamanUnit V Ststem Examples & Design IssuesK Sasi RekhaBelum ada peringkat
- Channel Estimation For Wireless OFDM SystemsDokumen31 halamanChannel Estimation For Wireless OFDM SystemsvgguhaBelum ada peringkat
- Indian RailwayDokumen19 halamanIndian RailwayMisha Ahuja0% (2)
- What Is The Function of SDCCHDokumen12 halamanWhat Is The Function of SDCCHjabi_shaik_1Belum ada peringkat
- Materials Science and Engineering An Introduction - Complete Solutions To Selected Problems - Callister - 6Th EdDokumen4 halamanMaterials Science and Engineering An Introduction - Complete Solutions To Selected Problems - Callister - 6Th EdNabeelBelum ada peringkat
- 1V. Satellite Access - 2Dokumen49 halaman1V. Satellite Access - 2Sai TejaBelum ada peringkat
- Chapter 1 - Introduction To Switching Systems (EEEg8254) 2021Dokumen67 halamanChapter 1 - Introduction To Switching Systems (EEEg8254) 2021Barnabas FantahunBelum ada peringkat
- Multivibrator Manual PDFDokumen73 halamanMultivibrator Manual PDFAvijitRoyBelum ada peringkat
- CMC (2marks)Dokumen9 halamanCMC (2marks)Prabhu PkBelum ada peringkat
- Arrays Notes PDFDokumen20 halamanArrays Notes PDFSukhada Deshpande.Belum ada peringkat
- Subscriber Loop DesignDokumen3 halamanSubscriber Loop DesignNaila NaseerBelum ada peringkat
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeDari EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiBelum ada peringkat
- Lecture 2 - Digital TelevisionDokumen40 halamanLecture 2 - Digital TelevisionGerald Emmanuel100% (1)
- Coverage Evaluations in TunnelsDokumen16 halamanCoverage Evaluations in TunnelsRaúl Domínguez BastidasBelum ada peringkat
- Optical NetworksDokumen46 halamanOptical NetworksChakravarthi ChittajalluBelum ada peringkat
- Aircom Microwave Link PlanningDokumen192 halamanAircom Microwave Link PlanningEmerson ValadãoBelum ada peringkat
- Ergodic Capacity For MIMO LTEDokumen15 halamanErgodic Capacity For MIMO LTENebiye SolomonBelum ada peringkat
- 2 PSTN PDFDokumen38 halaman2 PSTN PDFRamyAyashBelum ada peringkat
- Scfdma1234 PDFDokumen30 halamanScfdma1234 PDFPankaj B MahajanBelum ada peringkat
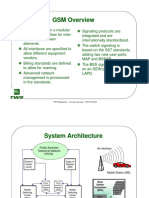
- An Overview of The GSM SystemDokumen32 halamanAn Overview of The GSM System0796105632Belum ada peringkat
- Chapter 12Dokumen101 halamanChapter 12Wei GongBelum ada peringkat
- Difference Between PAMDokumen17 halamanDifference Between PAMultra dubsBelum ada peringkat
- Name of Course: E1-E2 CFADokumen6 halamanName of Course: E1-E2 CFARavi Shankar KrovvidiBelum ada peringkat
- Telecommunication Switching System Control of Switching System PDFDokumen19 halamanTelecommunication Switching System Control of Switching System PDFUdhay Prakash100% (1)
- GSM Link Budget Welcome!: Additional Resources ListDokumen34 halamanGSM Link Budget Welcome!: Additional Resources Listagni mohannda100% (1)
- No 4 ESS Toll Switch: K.Manju Shree (2018504556)Dokumen18 halamanNo 4 ESS Toll Switch: K.Manju Shree (2018504556)Manjushree KumaravelBelum ada peringkat
- Wa0003Dokumen24 halamanWa0003Anusha JBelum ada peringkat
- DSP Processors and ArchitecturesDokumen2 halamanDSP Processors and ArchitecturesVemuganti RahulBelum ada peringkat
- FPGA Implementation of CORDIC-Based QRD-RLS AlgorithmDokumen5 halamanFPGA Implementation of CORDIC-Based QRD-RLS Algorithmsappal73asBelum ada peringkat
- Optical NetworksDokumen36 halamanOptical NetworksAnonymous i8jqGxiN9Belum ada peringkat
- Introduction LTEDokumen40 halamanIntroduction LTEMarco SignoriniBelum ada peringkat
- WCDMA Air Interface FundamentalsDokumen29 halamanWCDMA Air Interface FundamentalsHimanshu KaushalBelum ada peringkat
- GSM SignalingDokumen11 halamanGSM SignalingAmruthVarmaBelum ada peringkat
- IS-54 Dan IS-136Dokumen29 halamanIS-54 Dan IS-136hasbiiieBelum ada peringkat
- 1 5 Analog To Digital Voice EncodingDokumen10 halaman1 5 Analog To Digital Voice EncodingDương Thế CườngBelum ada peringkat
- CMC Unit-IDokumen30 halamanCMC Unit-Iabhi1984_luckyBelum ada peringkat
- Cross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionDari EverandCross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionBelum ada peringkat
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryDari EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryBelum ada peringkat
- Signaling in Telecommunication NetworksDari EverandSignaling in Telecommunication NetworksPenilaian: 4 dari 5 bintang4/5 (1)
- Advanced Optical Modulation Formats in High-Speed Lightwave SystemDokumen95 halamanAdvanced Optical Modulation Formats in High-Speed Lightwave SystemAmanuel TadeleBelum ada peringkat
- Recent Advances and Trends For Digital Coherent 100Gb/s and Beyond Technologies in Submarine Optical CableDokumen25 halamanRecent Advances and Trends For Digital Coherent 100Gb/s and Beyond Technologies in Submarine Optical CableAmanuel TadeleBelum ada peringkat
- OFDM With Different ModulationDokumen2 halamanOFDM With Different ModulationAmanuel TadeleBelum ada peringkat
- 10 1109@JLT 2006 885260 PDFDokumen18 halaman10 1109@JLT 2006 885260 PDFAmanuel TadeleBelum ada peringkat
- Carrier Wave Reutilization in Optical Fiber Communications PDFDokumen136 halamanCarrier Wave Reutilization in Optical Fiber Communications PDFAmanuel TadeleBelum ada peringkat
- Sample Questions For SPT (English)Dokumen36 halamanSample Questions For SPT (English)Amanuel TadeleBelum ada peringkat
- 21 Adm Eth 081517 A0Dokumen1 halaman21 Adm Eth 081517 A0Amanuel Tadele100% (1)
- DPQPSKDokumen5 halamanDPQPSKAmanuel TadeleBelum ada peringkat
- Tellaps ReferenceDokumen172 halamanTellaps ReferenceAmanuel Tadele100% (1)
- CSC541 Fall2015 QuestionBankDokumen12 halamanCSC541 Fall2015 QuestionBankAmanuel TadeleBelum ada peringkat
- Benedikovic 2012Dokumen4 halamanBenedikovic 2012Amanuel TadeleBelum ada peringkat
- Lecture Note - Cropped 12Dokumen22 halamanLecture Note - Cropped 12Amanuel TadeleBelum ada peringkat
- Benedikovic 2012Dokumen4 halamanBenedikovic 2012Amanuel TadeleBelum ada peringkat
- 03-Wireless Sensor Networks PDFDokumen27 halaman03-Wireless Sensor Networks PDFAmanuel TadeleBelum ada peringkat
- Table 3-1 System Configuration Equipment Type Equipment NameDokumen14 halamanTable 3-1 System Configuration Equipment Type Equipment NameAmanuel TadeleBelum ada peringkat
- DR M160II User ManualDokumen106 halamanDR M160II User ManualAmanuel TadeleBelum ada peringkat
- PTN and IP Based Mobile BackhaulDokumen8 halamanPTN and IP Based Mobile BackhaulAmanuel TadeleBelum ada peringkat
- Solution Manual of Statistical Digital Signal Processing Modeling by MonsonHDokumen315 halamanSolution Manual of Statistical Digital Signal Processing Modeling by MonsonHManuel Dominguez83% (29)
- Power Ge'ezDokumen26 halamanPower Ge'ezAmanuel Tadele90% (10)
- Field and Maxwell EquationDokumen15 halamanField and Maxwell EquationAmanuel TadeleBelum ada peringkat
- BrochureDokumen2 halamanBrochureAmanuel TadeleBelum ada peringkat
- U31 V12!11!40 SoftwareInstallationGuide enDokumen69 halamanU31 V12!11!40 SoftwareInstallationGuide enAmanuel Tadele100% (1)
- Module+5+LTE Radio PlanningDokumen224 halamanModule+5+LTE Radio PlanningAmanuel TadeleBelum ada peringkat
- Framed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Dokumen16 halamanFramed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Amanuel Tadele100% (1)
- Work Experience Issuance Request FormatDokumen1 halamanWork Experience Issuance Request FormatAmanuel TadeleBelum ada peringkat
- Framed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Dokumen16 halamanFramed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Amanuel Tadele100% (1)
- Framed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Dokumen16 halamanFramed/Non-Framed Ethernet To E1 Protocol Converter Model No. BXT-E10Amanuel Tadele100% (1)
- Work Experience Issuance Request FormatDokumen1 halamanWork Experience Issuance Request FormatAmanuel TadeleBelum ada peringkat
- MS Word 2007 Shortcut KeysDokumen11 halamanMS Word 2007 Shortcut KeysMuhammad AhmadBelum ada peringkat
- 64) Mailchimp Project Certificate PDFDokumen1 halaman64) Mailchimp Project Certificate PDFDr Alla SrivaniBelum ada peringkat
- Aruba Instant On AP11: Wi-Fi Designed With Small Businesses in MindDokumen5 halamanAruba Instant On AP11: Wi-Fi Designed With Small Businesses in MindAchmad AminBelum ada peringkat
- Wireless Install Guide English Samsung CLX-9352Dokumen12 halamanWireless Install Guide English Samsung CLX-9352BoxBelum ada peringkat
- Lab 3 Promoting To Server StatusDokumen16 halamanLab 3 Promoting To Server StatusNagavelli Aravind reddyBelum ada peringkat
- Intelligent Road and Street Lighting in EuropeDokumen26 halamanIntelligent Road and Street Lighting in EuropeGizas CraistBelum ada peringkat
- ReflectionDokumen4 halamanReflectionHafizi ZsharpBelum ada peringkat
- Wireshark Lab: NAT v7.0: 1 ObjectiveDokumen4 halamanWireshark Lab: NAT v7.0: 1 ObjectiveHugo GustavoBelum ada peringkat
- Enumeration and Foot PrintingDokumen19 halamanEnumeration and Foot Printingxeyog51371Belum ada peringkat
- Customer Satisfaction in Reliance Jio ProjectDokumen97 halamanCustomer Satisfaction in Reliance Jio ProjectHarikrishnan33% (3)
- 4it1 01r Que 20220517 PDFDokumen24 halaman4it1 01r Que 20220517 PDFcherryl hartonoBelum ada peringkat
- Lesson 1Dokumen29 halamanLesson 1AshleyBelum ada peringkat
- EchoLife HG520s Home Gateway Quick StartDokumen14 halamanEchoLife HG520s Home Gateway Quick StartAdi CatanescuBelum ada peringkat
- Motion BlurDokumen29 halamanMotion Bluralokesh1982Belum ada peringkat
- Effects (Physical, Behavioural and Psycho-Social) of Using Mobile Phones and Other Devices With Internet Accessibility by ChildrenDokumen42 halamanEffects (Physical, Behavioural and Psycho-Social) of Using Mobile Phones and Other Devices With Internet Accessibility by Childrenshivani shindeBelum ada peringkat
- Ictari Index 1-49Dokumen17 halamanIctari Index 1-49monkiki9024Belum ada peringkat
- Star Topology: by - Saurabh SinghDokumen13 halamanStar Topology: by - Saurabh Singhsaurabh singh0% (1)
- InformaticsPractices MSDokumen7 halamanInformaticsPractices MSmansoorbariBelum ada peringkat
- Amtrak Trackside WiFi RFP IntroductionDokumen11 halamanAmtrak Trackside WiFi RFP IntroductionEsme VosBelum ada peringkat
- Search InternetDokumen61 halamanSearch InternetIsrael EyasuBelum ada peringkat
- Raghav Patnecha CVDokumen2 halamanRaghav Patnecha CVGoden MBelum ada peringkat
- 71 To 51 My Journey From FailureDokumen139 halaman71 To 51 My Journey From FailurePunam SinghBelum ada peringkat
- Youtube Ranking Guide 2022Dokumen26 halamanYoutube Ranking Guide 2022Pro NebyuBelum ada peringkat
- New Report of Jayanti12Dokumen71 halamanNew Report of Jayanti12AnKit SacHanBelum ada peringkat
- 101 83 - DE - 4300 - 4380 - withIVSDrive - Quick - Installation - GuideDokumen4 halaman101 83 - DE - 4300 - 4380 - withIVSDrive - Quick - Installation - GuideLee ChorneyBelum ada peringkat
- LTE Mobility Concept & Case StudyDokumen45 halamanLTE Mobility Concept & Case StudySydhul KalyanBelum ada peringkat
- Advertainment or Adcreep - Game Players' Attitudes Toward Advertising and Product Placements in Computer GamesDokumen19 halamanAdvertainment or Adcreep - Game Players' Attitudes Toward Advertising and Product Placements in Computer GamesSerban SergiuBelum ada peringkat
- Ijrrmds 0201 2Dokumen5 halamanIjrrmds 0201 2Prashant Kumar TripathiBelum ada peringkat
- How To Troubleshoot One Way Speech, Mute Calls, No Audio in A GSM Network Due To Transmission Media Mismatch. - HuaweiDokumen4 halamanHow To Troubleshoot One Way Speech, Mute Calls, No Audio in A GSM Network Due To Transmission Media Mismatch. - Huaweidinzo ccsiBelum ada peringkat
- Logitech X52 Pro HOTAS InstallationDokumen3 halamanLogitech X52 Pro HOTAS Installationmocsa1Belum ada peringkat