Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Universal Joint Alignment Proc 111606Dokumen5 halamanUniversal Joint Alignment Proc 111606Slobodan GaricBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Structural EfficiencyDokumen5 halamanStructural EfficiencychoopoBelum ada peringkat
- Install Solid RivetsDokumen19 halamanInstall Solid Rivetsolegprikhodko2809Belum ada peringkat
- General Tolerances DIN ISO 2768Dokumen4 halamanGeneral Tolerances DIN ISO 2768NaveenRajBelum ada peringkat
- SandwichDokumen23 halamanSandwichGuillermo Angarita100% (1)
- History of Composite Materials in Submarine ConstructionDokumen16 halamanHistory of Composite Materials in Submarine ConstructionYakob Kher AldenBelum ada peringkat
- CNG Mother StationDokumen8 halamanCNG Mother StationsaravananthamBelum ada peringkat
- DVS 1619 EnglishDokumen20 halamanDVS 1619 EnglishSlobodan Garic50% (2)
- BS en Iec 60974Dokumen27 halamanBS en Iec 60974Slobodan Garic100% (1)
- Welding PositionDokumen6 halamanWelding Positionenels77Belum ada peringkat
- Welding PositionDokumen6 halamanWelding Positionenels77Belum ada peringkat
- PDFDokumen69 halamanPDFSlobodan GaricBelum ada peringkat
- Rasadnik Antić 2018 Katalog i Kontakt BrojeviDokumen6 halamanRasadnik Antić 2018 Katalog i Kontakt BrojeviSlobodan GaricBelum ada peringkat
- Stir Casting LibreDokumen7 halamanStir Casting LibreNagarajanRKBelum ada peringkat
- Analysis of A Sheet Metal Bucket Elevator HeadDokumen128 halamanAnalysis of A Sheet Metal Bucket Elevator HeadNono_geotecBelum ada peringkat
- Study of Wear Properties of Al-Sic Composites: Manoj Singla, Lakhvir Singh, Vikas ChawlaDokumen9 halamanStudy of Wear Properties of Al-Sic Composites: Manoj Singla, Lakhvir Singh, Vikas ChawlaSlobodan GaricBelum ada peringkat
- Can Gil OnesDokumen7 halamanCan Gil OnesGuido Alonso Vasquez QuirozBelum ada peringkat
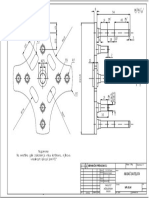
- Nosac Satelita Rad-Model - PDF StampaDokumen1 halamanNosac Satelita Rad-Model - PDF StampaSlobodan GaricBelum ada peringkat
- Technical Note: K-Series Gear ReducerDokumen6 halamanTechnical Note: K-Series Gear ReducerSlobodan GaricBelum ada peringkat
- Wind TurbinesDokumen14 halamanWind TurbinesSlobodan GaricBelum ada peringkat
- Files Miscellaneous BearingsDokumen12 halamanFiles Miscellaneous BearingsSlobodan GaricBelum ada peringkat
- Belt Fasteners KatalogDokumen1 halamanBelt Fasteners KatalogSlobodan GaricBelum ada peringkat
- 143 102 ConcretepumpDokumen4 halaman143 102 ConcretepumpSlobodan GaricBelum ada peringkat
- Wind TurbinesDokumen14 halamanWind TurbinesSlobodan GaricBelum ada peringkat
- GTX 560 User GuideDokumen31 halamanGTX 560 User GuideSlobodan GaricBelum ada peringkat
- Universal JointsDokumen10 halamanUniversal JointsshashanksekharBelum ada peringkat
- Pat 2225993Dokumen11 halamanPat 2225993Slobodan GaricBelum ada peringkat
- Resin Film PrepregDokumen8 halamanResin Film PrepregyigitilgazBelum ada peringkat
- The Royal Institution of Naval Architects The Advantages of Composite Material in Marine Renewable Energy StructuresDokumen7 halamanThe Royal Institution of Naval Architects The Advantages of Composite Material in Marine Renewable Energy StructuressimalaraviBelum ada peringkat
- CH 01Dokumen10 halamanCH 01Thembelihle HadebeBelum ada peringkat
- Material Selection for Aerospace Nose ConesDokumen29 halamanMaterial Selection for Aerospace Nose ConesShree Ram Pandey100% (1)
- A Review: Dissimilar Material Joining of Metal To Polymer Using Friction Stir Welding (FSW)Dokumen5 halamanA Review: Dissimilar Material Joining of Metal To Polymer Using Friction Stir Welding (FSW)IJSTEBelum ada peringkat
- Febrication ProcessesDokumen5 halamanFebrication Processesnilghosh001100% (1)
- B-Basis T650 3K-135-8H Fabric-7740Dokumen142 halamanB-Basis T650 3K-135-8H Fabric-7740dmarchant1Belum ada peringkat
- Carbon Fiber - CoursDokumen33 halamanCarbon Fiber - Courstrannhu1293599Belum ada peringkat
- Seminar Report PDFDokumen20 halamanSeminar Report PDFAakash PatilBelum ada peringkat
- Giant Catalogue - 2014Dokumen172 halamanGiant Catalogue - 2014GrahamBroBelum ada peringkat
- Composites JEC 2010Dokumen5 halamanComposites JEC 2010bxlmichael8837Belum ada peringkat
- 20141008composites Market Report GRPCRPDokumen44 halaman20141008composites Market Report GRPCRPMarina FungBelum ada peringkat
- Brochure Productos Fourthane 2018 enDokumen8 halamanBrochure Productos Fourthane 2018 enJorge Pedro Castillo100% (1)
- Effect of Fiber Length on Mechanical Properties of Coir Fiber Reinforced Epoxy CompositesDokumen6 halamanEffect of Fiber Length on Mechanical Properties of Coir Fiber Reinforced Epoxy Compositesbrar_harmanpreet01Belum ada peringkat
- Composite Materials DesignDokumen72 halamanComposite Materials DesignGihanFernandoBelum ada peringkat
- Sikawrap Hex 103C: Carbon Fiber Fabric For Structural StrengtheningDokumen3 halamanSikawrap Hex 103C: Carbon Fiber Fabric For Structural StrengtheningKoh HanBelum ada peringkat
- Lecture 8: Carbon-Carbon CompositeDokumen7 halamanLecture 8: Carbon-Carbon CompositeMuhammad AhmedBelum ada peringkat
- Report On Bridge Decks Free of Steel Reinforcement: ACI ITG-3-04Dokumen21 halamanReport On Bridge Decks Free of Steel Reinforcement: ACI ITG-3-04pechugonisBelum ada peringkat
- 106 JmesDokumen17 halaman106 JmesYuvaraj GBelum ada peringkat
- Ceramic Disc BrakeDokumen14 halamanCeramic Disc BrakeChiragBelum ada peringkat
- F655 Us PDFDokumen6 halamanF655 Us PDFtruva_kissBelum ada peringkat
- JD Jones Catalogue PDFDokumen90 halamanJD Jones Catalogue PDFsureshmechanical86Belum ada peringkat
- Textile ProgressDokumen60 halamanTextile Progressranjann349Belum ada peringkat
- Horse Construction's Unidirectional Carbon Fiber FabricDokumen36 halamanHorse Construction's Unidirectional Carbon Fiber FabricArok ABelum ada peringkat
- Classification of Composite MaterialsDokumen4 halamanClassification of Composite MaterialsSreejith S NairBelum ada peringkat