Anda mungkin juga menyukai
- Conectores y clavijas de la unidad de control del motor Hyundai Accent 1.6 GDiDokumen4 halamanConectores y clavijas de la unidad de control del motor Hyundai Accent 1.6 GDiRafaelJimenezBelum ada peringkat
- 416D, 420D, 424D, 428D, 430D, 432D, 442D, Manual-de-Operacion 50 PagDokumen42 halaman416D, 420D, 424D, 428D, 430D, 432D, 442D, Manual-de-Operacion 50 PagCristian amed Claros Zambrana100% (1)
- Catálogo Verlinde VTDokumen8 halamanCatálogo Verlinde VThugorococBelum ada peringkat
- Codigos de Lectura de Un NeumaticoDokumen4 halamanCodigos de Lectura de Un NeumaticoPaulino Montilla CBelum ada peringkat
- Anexo 3 - Hoja de RutaDokumen1 halamanAnexo 3 - Hoja de Rutaconfi petrolBelum ada peringkat
- Rodillo BOMAGDokumen16 halamanRodillo BOMAGMarcialChillitupaAyma100% (2)
- Rendimientos de Escala - Como Se CalculanDokumen45 halamanRendimientos de Escala - Como Se CalculanAlamos AmoblamientosBelum ada peringkat
- Manual de Partes, Servicio, Operación (Español 2017) - 830Dokumen24 halamanManual de Partes, Servicio, Operación (Español 2017) - 830Yira Lizeth Hernandez Gonzalez100% (1)
- Herramienta Rad 34gxDokumen7 halamanHerramienta Rad 34gxJuan Ricardo Bolivar PilcoBelum ada peringkat
- Modelos Matematicos en BiologiaDokumen245 halamanModelos Matematicos en BiologiaMagdaBelum ada peringkat
- Ensayo Sobre Kuhn y La Estructura de Las Revoluciones Cientificas. - Ivan GalvezDokumen8 halamanEnsayo Sobre Kuhn y La Estructura de Las Revoluciones Cientificas. - Ivan GalvezpsicologysBelum ada peringkat
- Guia CENEVAL para ElectronicaDokumen72 halamanGuia CENEVAL para ElectronicaFelipe Edgar Martinez Medina0% (1)
- Despiece Polipastos DIEXADokumen19 halamanDespiece Polipastos DIEXAFélix Suco100% (1)
- Manual-Ms New PDFDokumen14 halamanManual-Ms New PDFluis.chuquimiaBelum ada peringkat
- 800 Instrucciones de Uso Mayr EspanolDokumen19 halaman800 Instrucciones de Uso Mayr EspanolDaniel StreamBelum ada peringkat
- Catlogo WRTH Peru 2022Dokumen715 halamanCatlogo WRTH Peru 2022Jose Alesandro CallupeBelum ada peringkat
- Polipastos Demag Parte 2: Carro birraíl EZLDH 2000Dokumen16 halamanPolipastos Demag Parte 2: Carro birraíl EZLDH 2000AllinUrbinaGoicocheaBelum ada peringkat
- Ejercicios de Integrales de Línea, Superficie y VolumenDari EverandEjercicios de Integrales de Línea, Superficie y VolumenPenilaian: 4 dari 5 bintang4/5 (2)
- Nissan Iberia, S.ADokumen12 halamanNissan Iberia, S.AJose Maria Carmona ArocaBelum ada peringkat
- RA - 15 Inspección de Equipos de Izaje - Rev.2Dokumen3 halamanRA - 15 Inspección de Equipos de Izaje - Rev.2ANTONIOBelum ada peringkat
- CSWP Ejercicios modelado sólidos Solidworks masa piezasDokumen15 halamanCSWP Ejercicios modelado sólidos Solidworks masa piezasemilio jose castillo fuentesBelum ada peringkat
- Varia DorDokumen2 halamanVaria DorxamuntxBelum ada peringkat
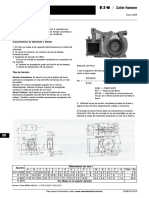
- FF-Frenos magnéticos Cutler-HammerDokumen3 halamanFF-Frenos magnéticos Cutler-HammerSantiagoAules100% (1)
- Instrucción de Trabajo para La Utilización de Carretilla ElevadoraDokumen6 halamanInstrucción de Trabajo para La Utilización de Carretilla Elevadorajorge luisBelum ada peringkat
- Acoplamientos TOLLOKDokumen35 halamanAcoplamientos TOLLOKWANKEL25Belum ada peringkat
- Guia Rápida Siemens 802c Torno OkDokumen20 halamanGuia Rápida Siemens 802c Torno OkVictor Cerda MorenoBelum ada peringkat
- Logan PDFDokumen9 halamanLogan PDFfdorojrBelum ada peringkat
- Sierra Cinta ElectricaDokumen67 halamanSierra Cinta ElectricaKENNETHBelum ada peringkat
- Catalogo Martillos AnaDokumen2 halamanCatalogo Martillos AnahugoDiaz1981Belum ada peringkat
- Plan de Rescate - TraduccionDokumen76 halamanPlan de Rescate - TraduccionegarciachBelum ada peringkat
- Defender Td5 MY02 - Manual Del ConductorDokumen176 halamanDefender Td5 MY02 - Manual Del ConductorEsteban Del Río GonçalvesBelum ada peringkat
- MN700 Mc001a SPF (Spanish)Dokumen52 halamanMN700 Mc001a SPF (Spanish)arturo sanchez barraganBelum ada peringkat
- 1 Forja PDFDokumen34 halaman1 Forja PDFAnonymous Cd3r7JGjwbBelum ada peringkat
- Lincoln Inversor 200i ST soldadoras compacta semi-industrialDokumen2 halamanLincoln Inversor 200i ST soldadoras compacta semi-industrialCarlos Enrique Rivas BustamanteBelum ada peringkat
- Clasificación de Los Acoplamientos Forma de Texto PDFDokumen17 halamanClasificación de Los Acoplamientos Forma de Texto PDFLuis Jose Duarte BohorquezBelum ada peringkat
- Taladro StancoDokumen29 halamanTaladro StancoqcomoBelum ada peringkat
- Ficha Ténica Excavadora Hidráulica 320DLDokumen25 halamanFicha Ténica Excavadora Hidráulica 320DLEdwin Calcina100% (1)
- Ajustes suspensión 30 pruebasDokumen8 halamanAjustes suspensión 30 pruebasSegundo DiazBelum ada peringkat
- VFM 9000 - 13 - Janeiro - 2014 - Espanhol-5565Dokumen48 halamanVFM 9000 - 13 - Janeiro - 2014 - Espanhol-5565agro tracsurcaBelum ada peringkat
- Sistema de prolongas libre de mantenimiento para grúasDokumen4 halamanSistema de prolongas libre de mantenimiento para grúasAlex LeónBelum ada peringkat
- Catalogo LVM PDFDokumen82 halamanCatalogo LVM PDFMaximiliano Ezequiel LopezBelum ada peringkat
- Ficha Tecnica Razzer GTR2Dokumen1 halamanFicha Tecnica Razzer GTR2Jesús crewvictoria VallejoBelum ada peringkat
- Liebherr Hs 855 HD Grua Sobre Cadenas Dragalina Datos Tecnicos Espanol 10223152 2011Dokumen16 halamanLiebherr Hs 855 HD Grua Sobre Cadenas Dragalina Datos Tecnicos Espanol 10223152 2011Jorge SanchezBelum ada peringkat
- Cuestionario 1Dokumen9 halamanCuestionario 1Isai CabreraBelum ada peringkat
- Plantilla Tecnica Effer 250 (Graficos de Carga)Dokumen2 halamanPlantilla Tecnica Effer 250 (Graficos de Carga)Leonardo Altuve100% (2)
- Vitara 1.6 1997 g16bDokumen3 halamanVitara 1.6 1997 g16bwnsdBelum ada peringkat
- DespieceDokumen134 halamanDespieceFranklin TicuñaBelum ada peringkat
- Manual de Operacion y Mantenimiento de Enrollador CRL500 (03.12.19)Dokumen98 halamanManual de Operacion y Mantenimiento de Enrollador CRL500 (03.12.19)Alfredo CcenteBelum ada peringkat
- Procesos de Soldadura SMAWDokumen102 halamanProcesos de Soldadura SMAWJimyVillaBelum ada peringkat
- Como Leer Diagramas EléctricosDokumen15 halamanComo Leer Diagramas EléctricosEmanuel VillarruelBelum ada peringkat
- Tutorial para Maquinado en Torno Dynamyte 3000Dokumen8 halamanTutorial para Maquinado en Torno Dynamyte 3000Antonio Juan AntonioBelum ada peringkat
- Folleto Muy Bueno SprinterDokumen8 halamanFolleto Muy Bueno Sprinterchris100% (1)
- Manual de EnchapadoraDokumen128 halamanManual de EnchapadoraLuis Miguel HilarioBelum ada peringkat
- Catalogo Chengshan PCRDokumen8 halamanCatalogo Chengshan PCRJorge de la RochaBelum ada peringkat
- Magma M1 User Manual - SpanishDokumen26 halamanMagma M1 User Manual - SpanishVicente giraldo0% (1)
- Power Lock bujes fijaciónDokumen10 halamanPower Lock bujes fijaciónJosevi MorenoBelum ada peringkat
- Cable s5Dokumen2 halamanCable s5acetseBelum ada peringkat
- Ext Ylpaycmzddmgpda8bxrzDokumen4 halamanExt Ylpaycmzddmgpda8bxrzAnonymous TXkP1l80OcBelum ada peringkat
- Victor HidroDokumen2 halamanVictor HidroJhon Edward Pena Gutierrez100% (1)
- Polipastos DHDokumen120 halamanPolipastos DHDante WilliamsBelum ada peringkat
- Auma SG 05.1 PDFDokumen48 halamanAuma SG 05.1 PDFAlex ChavezBelum ada peringkat
- Cautin PDFDokumen6 halamanCautin PDFMontacargas MissaelBelum ada peringkat
- Soluciones para elevación industrial y automatizaciónDokumen16 halamanSoluciones para elevación industrial y automatizaciónCristian Castillo BarrientosBelum ada peringkat
- M08 Mantenimiento Cargadora Doosan 250-VDokumen6 halamanM08 Mantenimiento Cargadora Doosan 250-VPaulitoMartinezBelum ada peringkat
- Alineamiento de RotorDokumen10 halamanAlineamiento de RotorAbel MurañaBelum ada peringkat
- Mec Cuatro BarrasDokumen20 halamanMec Cuatro BarrasHenry Geovanny AvilaBelum ada peringkat
- Estructura EconómicaDokumen1 halamanEstructura EconómicaLeo Salazar EsquivelBelum ada peringkat
- Lista de Cuerpos Legales Que Se Apliquen en El Ambiente Nacional Público, PrivadoDokumen3 halamanLista de Cuerpos Legales Que Se Apliquen en El Ambiente Nacional Público, PrivadoLeo Salazar EsquivelBelum ada peringkat
- Formatos Marzo Agosto 2019Dokumen33 halamanFormatos Marzo Agosto 2019Leo Salazar EsquivelBelum ada peringkat
- Tarea 8Dokumen4 halamanTarea 8Leo Salazar EsquivelBelum ada peringkat
- Silabo End Sep - 18 - Feb - 19Dokumen14 halamanSilabo End Sep - 18 - Feb - 19Leo Salazar EsquivelBelum ada peringkat
- Molino de AjoDokumen2 halamanMolino de AjoLeo Salazar EsquivelBelum ada peringkat
- Misión Visión Uta-FicmDokumen1 halamanMisión Visión Uta-FicmLeo Salazar EsquivelBelum ada peringkat
- Taller 2 - BDokumen2 halamanTaller 2 - BLeo Salazar EsquivelBelum ada peringkat
- Silabo EndDokumen16 halamanSilabo EndLeo Salazar EsquivelBelum ada peringkat
- Algebra c3 Tecnicismo AlgebraicoDokumen35 halamanAlgebra c3 Tecnicismo AlgebraicoLeo Salazar Esquivel0% (1)
- Tarea 7Dokumen2 halamanTarea 7Leo Salazar EsquivelBelum ada peringkat
- Presentacion DefectologiaDokumen18 halamanPresentacion DefectologiaDamian IzurietaBelum ada peringkat
- Algebra-C2-Numeros Reales PDFDokumen44 halamanAlgebra-C2-Numeros Reales PDFLeo Salazar Esquivel100% (1)
- Algebra c4 Fracciones AlgebraicasDokumen32 halamanAlgebra c4 Fracciones AlgebraicasLeo Salazar EsquivelBelum ada peringkat
- Algebra c1 ConjuntosDokumen51 halamanAlgebra c1 ConjuntosLeo Salazar EsquivelBelum ada peringkat
- Ensayos VT y PTDokumen18 halamanEnsayos VT y PTChristian PazmiñoBelum ada peringkat
- ALGEBRA Contenidos ConceptualesDokumen1 halamanALGEBRA Contenidos ConceptualesLeo Salazar EsquivelBelum ada peringkat
- Partículas MagneticasDokumen16 halamanPartículas MagneticasDamian IzurietaBelum ada peringkat
- Números AdimensionalesDokumen3 halamanNúmeros AdimensionalesLeo Salazar EsquivelBelum ada peringkat
- Fundamentos y aplicaciones del ensayo no destructivo por líquido penetranteDokumen12 halamanFundamentos y aplicaciones del ensayo no destructivo por líquido penetranteCarlos SanchezBelum ada peringkat
- Ensayos VTDokumen9 halamanEnsayos VTDamian IzurietaBelum ada peringkat
- Seguimiento Ficha AgroindustrialesDokumen4 halamanSeguimiento Ficha AgroindustrialesLeo Salazar EsquivelBelum ada peringkat
- Guia Laboratorio TornoDokumen6 halamanGuia Laboratorio TornoLeo Salazar EsquivelBelum ada peringkat
- Ensayos UT 2Dokumen16 halamanEnsayos UT 2Damian IzurietaBelum ada peringkat
- Corrientes Inducidas PDFDokumen9 halamanCorrientes Inducidas PDFMario Alexander Villalba YambayBelum ada peringkat
- Calificacion e Inspeccion Modo de CompatibilidadDokumen8 halamanCalificacion e Inspeccion Modo de CompatibilidadLeo Salazar EsquivelBelum ada peringkat
- Guia Laboratorio Torno PequeñoDokumen5 halamanGuia Laboratorio Torno PequeñocheBelum ada peringkat
- Ernc 01 PDFDokumen99 halamanErnc 01 PDFLeo Salazar EsquivelBelum ada peringkat
- Sílabo Pequñas CentralesDokumen13 halamanSílabo Pequñas CentralesLeo Salazar EsquivelBelum ada peringkat
- Formato ProyectoDokumen2 halamanFormato ProyectoLeo Salazar EsquivelBelum ada peringkat
- Lugeon PaperDokumen7 halamanLugeon PaperRoxana Salas HuenchuánBelum ada peringkat
- Escalera Lateral de Trabajo de Planta de Inyeccion N-03Dokumen12 halamanEscalera Lateral de Trabajo de Planta de Inyeccion N-03B31 ARQUITECTURABelum ada peringkat
- Análisis armónico señal muestreoDokumen2 halamanAnálisis armónico señal muestreojesusBelum ada peringkat
- Informe LaboratorioDokumen22 halamanInforme LaboratorioLuis Arnulfo Sanchez Diaz100% (1)
- Informe de Investigación Parte II RQDokumen8 halamanInforme de Investigación Parte II RQPamee MancillaBelum ada peringkat
- Ubicación de puntos en el plano cartesianoDokumen5 halamanUbicación de puntos en el plano cartesianosandra chavesBelum ada peringkat
- Números Fraccionarios y DecimalesDokumen42 halamanNúmeros Fraccionarios y DecimalesSamy OlmedoBelum ada peringkat
- 3828A20894A Spanish PDFDokumen21 halaman3828A20894A Spanish PDFJosé Antonio Santiago SánchezBelum ada peringkat
- Polimorfismo y herencia en CDokumen5 halamanPolimorfismo y herencia en CAlisson DuranBelum ada peringkat
- 8 Torsion Por MembranasDokumen6 halaman8 Torsion Por MembranasEdwinGioMoralesBelum ada peringkat
- 01 - Memoria de Cálculo Estructural - Zona ResidencialDokumen96 halaman01 - Memoria de Cálculo Estructural - Zona ResidencialJuan Miguel Pilco ChucuyaBelum ada peringkat
- Funciones y anatomía de los dientes: incisivos, caninos, premolares y molaresDokumen27 halamanFunciones y anatomía de los dientes: incisivos, caninos, premolares y molaresKarla LopezBelum ada peringkat
- Estadística II: Práctica dirigida No1 sobre variables aleatorias discretas y continuasDokumen2 halamanEstadística II: Práctica dirigida No1 sobre variables aleatorias discretas y continuasGuido LuqueBelum ada peringkat
- CBF210L Pract 08 (Energia Potenc A Cinetica)Dokumen5 halamanCBF210L Pract 08 (Energia Potenc A Cinetica)Jhon SnowBelum ada peringkat
- Cálculo de regulación y burden del lazo de tensiónDokumen2 halamanCálculo de regulación y burden del lazo de tensiónEstefania Imb EscobarBelum ada peringkat
- Plan de Muestreo de Aceptación Por AtributosDokumen7 halamanPlan de Muestreo de Aceptación Por AtributosSerch XpBelum ada peringkat
- Problemario para Cae1Dokumen46 halamanProblemario para Cae1Pablo Duque50% (2)
- Miguel MirandaDokumen35 halamanMiguel MirandaAlvaro MamaniBelum ada peringkat
- Electrostática y Ley de CoulombDokumen10 halamanElectrostática y Ley de CoulombAnonimo100% (1)
- 3.prob. Multiplicativos (220812)Dokumen3 halaman3.prob. Multiplicativos (220812)Iván ReyesBelum ada peringkat
- Tema2 Boletín BMSRDokumen21 halamanTema2 Boletín BMSRJorge Navarro LozanoBelum ada peringkat
- 2.3 Definición Del Tipo de Investigación A Utilizar en Su EstudioDokumen13 halaman2.3 Definición Del Tipo de Investigación A Utilizar en Su Estudioderones13Belum ada peringkat
- Resolución Ministerial Sobre Valores Límites Permisibles para Radiaciones No IonizantesDokumen19 halamanResolución Ministerial Sobre Valores Límites Permisibles para Radiaciones No IonizantesMichael ParkerBelum ada peringkat
- CLASEnBANDASnYnPOLEASnn3n 175eb40c71eb9f1Dokumen39 halamanCLASEnBANDASnYnPOLEASnn3n 175eb40c71eb9f1AndersonCastroBelum ada peringkat