Anda mungkin juga menyukai
- Control of Mobile Robots: Linear SystemsDokumen65 halamanControl of Mobile Robots: Linear Systemssonti11Belum ada peringkat
- ME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016Dokumen7 halamanME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016sonti11Belum ada peringkat
- Glue Lecture 7 Slides PDFDokumen9 halamanGlue Lecture 7 Slides PDFsonti11Belum ada peringkat
- Cura User-Manual v1.0Dokumen41 halamanCura User-Manual v1.0kaosad75% (4)
- Guitar String Tension ExperimentDokumen7 halamanGuitar String Tension Experimentsonti11Belum ada peringkat
- Lab 6 ManualDokumen4 halamanLab 6 Manualsonti11Belum ada peringkat
- Lab 7 ManualDokumen5 halamanLab 7 Manualsonti11Belum ada peringkat
- MSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09Dokumen390 halamanMSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09sonti11Belum ada peringkat
- Lab 9 ManualDokumen5 halamanLab 9 Manualsonti11Belum ada peringkat
- MSP4324x Family Technical Reference ManualDokumen802 halamanMSP4324x Family Technical Reference ManualJair PiñerosBelum ada peringkat
- Project DescriptionDokumen2 halamanProject Descriptionsonti11Belum ada peringkat
- Class 36 More Reform MovementsDokumen56 halamanClass 36 More Reform Movementssonti11Belum ada peringkat
- MSP 432 P 401 RDokumen157 halamanMSP 432 P 401 RestebanBelum ada peringkat
- 09 Twists and WrenchesDokumen13 halaman09 Twists and Wrenchessonti11Belum ada peringkat
- Class 39: Towards War: Test Prep: What Happened in Kansas in 1856?Dokumen41 halamanClass 39: Towards War: Test Prep: What Happened in Kansas in 1856?sonti11Belum ada peringkat
- EkinodonsoDokumen1 halamanEkinodonsosonti11Belum ada peringkat
- Poou: Scale 3:2 Isometric ViewDokumen1 halamanPoou: Scale 3:2 Isometric Viewsonti11Belum ada peringkat
- Lomax - Southern Tour: Lomax - Long Way To TravelDokumen51 halamanLomax - Southern Tour: Lomax - Long Way To Travelsonti11Belum ada peringkat
- William Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel ParrishDokumen42 halamanWilliam Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel Parrishsonti11Belum ada peringkat
- Class 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?Dokumen54 halamanClass 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?sonti11Belum ada peringkat
- 17jan - Nativeamerica - As PostedDokumen66 halaman17jan - Nativeamerica - As Postedsonti11Belum ada peringkat
- 15jan - Earliest Americans - As PostedDokumen58 halaman15jan - Earliest Americans - As Postedsonti11Belum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Classical Missile Autopilot DesignDokumen19 halamanClassical Missile Autopilot Designapi-19917230100% (2)
- Sample QuestionsDokumen108 halamanSample QuestionsAaje Baaje67% (3)
- Feedback For PhysicistsDokumen54 halamanFeedback For PhysicistsGabriel BarcikBelum ada peringkat
- Electronics and Circuits Lecture Notes PDFDokumen913 halamanElectronics and Circuits Lecture Notes PDFSajjad Hossain Shuvo100% (1)
- Python Control ManualDokumen56 halamanPython Control ManualFernando Andres VillarrealBelum ada peringkat
- Final 03Dokumen11 halamanFinal 03Luis AntonioBelum ada peringkat
- Rules For Making Bode Plots: Term Magnitude PhaseDokumen4 halamanRules For Making Bode Plots: Term Magnitude PhaseRaufzha AnandaBelum ada peringkat
- ALISON HIDRAULIC - Catalogue PDFDokumen250 halamanALISON HIDRAULIC - Catalogue PDFbaba0% (1)
- Robust MatlabDokumen151 halamanRobust MatlabMihai SuciuBelum ada peringkat
- Chapter 10: Frequency Response Techniques 1Dokumen60 halamanChapter 10: Frequency Response Techniques 1CesarBelum ada peringkat
- Practical Teaching Ideas For Multisim 10Dokumen300 halamanPractical Teaching Ideas For Multisim 10Fernanda Alves100% (2)
- Control EngineeringDokumen11 halamanControl EngineeringVignesh VickyBelum ada peringkat
- ICACC2021 Paper 35Dokumen6 halamanICACC2021 Paper 35Keziah Elizabeth GeorgeBelum ada peringkat
- Scilab Ninja: Module 3: Classical Loopshaping DesignDokumen12 halamanScilab Ninja: Module 3: Classical Loopshaping Designorg25grBelum ada peringkat
- Control System PracticalDokumen19 halamanControl System PracticalYashBelum ada peringkat
- Practical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitleDokumen20 halamanPractical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitlealwaysharshBelum ada peringkat
- C and I Lab Manual - 1Dokumen95 halamanC and I Lab Manual - 1iniyavan3119Belum ada peringkat
- Dynamic Aggregation of Generator Unit ModelsDokumen10 halamanDynamic Aggregation of Generator Unit ModelsAshik AhmedBelum ada peringkat
- Frequency ResponseDokumen50 halamanFrequency ResponseAli AhmadBelum ada peringkat
- Corrosion Behaviour of Tantalum in Sodium Hydroxide SolutionsDokumen6 halamanCorrosion Behaviour of Tantalum in Sodium Hydroxide SolutionsRathawit SingpanjanateeBelum ada peringkat
- AMME3500/9501 System Dynamics and Control Problem Set 11Dokumen3 halamanAMME3500/9501 System Dynamics and Control Problem Set 11Quazar001Belum ada peringkat
- FOMCON: A MATLAB Toolbox For Fractional-Order System Identification and ControlDokumen13 halamanFOMCON: A MATLAB Toolbox For Fractional-Order System Identification and ControlVineet PrasadBelum ada peringkat
- Control System - 1 PYQsDokumen7 halamanControl System - 1 PYQsAbhishekBelum ada peringkat
- Control Systems Engineering: 2 MarksDokumen24 halamanControl Systems Engineering: 2 MarksDhivyaManian67% (3)
- 781 ProjectDokumen9 halaman781 ProjectAayush ShrivastavaBelum ada peringkat
- Control SystemsDokumen25 halamanControl SystemsNandigam Chandu ChowdaryBelum ada peringkat
- QB BcsDokumen10 halamanQB BcsKrishna Reddy Y.VBelum ada peringkat
- Encoder and Decoder Circuits: Exp No:7Dokumen9 halamanEncoder and Decoder Circuits: Exp No:7Reena RajBelum ada peringkat
- AC Machines Lab ManualDokumen52 halamanAC Machines Lab ManualmitulBelum ada peringkat
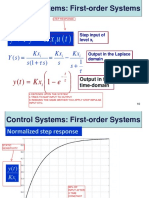
- Control Systems: First-Order Systems: y y KxutDokumen59 halamanControl Systems: First-Order Systems: y y KxutsatyamBelum ada peringkat