Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
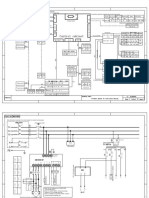
- Wire Diagram Complete Elevator - SL ELEVATOR 20190805Dokumen23 halamanWire Diagram Complete Elevator - SL ELEVATOR 20190805Eka Rama100% (2)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Voith Water Tractor ManuelDokumen24 halamanVoith Water Tractor ManuelokandandinBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Watergems - How To Design A Water Distribution SystemDokumen3 halamanWatergems - How To Design A Water Distribution SystemhiyogsBelum ada peringkat
- Innova P3Dokumen4 halamanInnova P3Xa MauBelum ada peringkat
- Imca m190 Rev.1 (Cat A B C)Dokumen4 halamanImca m190 Rev.1 (Cat A B C)Xa MauBelum ada peringkat
- Spark Plug AnalysisDokumen25 halamanSpark Plug AnalysisXa MauBelum ada peringkat
- Imca m190 Rev.1 (Cat A B C)Dokumen4 halamanImca m190 Rev.1 (Cat A B C)Xa MauBelum ada peringkat
- Innova 2011Dokumen3 halamanInnova 2011Xa MauBelum ada peringkat
- Toyota InnovaDokumen2 halamanToyota InnovaXa MauBelum ada peringkat
- Innova 2011Dokumen3 halamanInnova 2011Xa MauBelum ada peringkat
- High Tech AalbersDokumen12 halamanHigh Tech AalbersXa MauBelum ada peringkat
- 32 - Techop Cross ConnectionsDokumen34 halaman32 - Techop Cross ConnectionsXa MauBelum ada peringkat
- TECHOP Annual DP Trials and Gap AnalysisDokumen44 halamanTECHOP Annual DP Trials and Gap AnalysissathiaselanpasskerenBelum ada peringkat
- TECHOP Software TestingDokumen29 halamanTECHOP Software TestingXa MauBelum ada peringkat
- DP Thought and Practices - Part1Dokumen4 halamanDP Thought and Practices - Part1Xa MauBelum ada peringkat
- DP Personnel Guidance For Professional DevelopmentDokumen26 halamanDP Personnel Guidance For Professional DevelopmentXa MauBelum ada peringkat
- Techop External InterfacesDokumen30 halamanTechop External InterfacesXa MauBelum ada peringkat
- Abstract Power FossDokumen1 halamanAbstract Power FossXa MauBelum ada peringkat
- Abstract Sensors Bar SeverDokumen1 halamanAbstract Sensors Bar SeverXa MauBelum ada peringkat
- Risk WeingarthDokumen10 halamanRisk WeingarthXa MauBelum ada peringkat
- Fieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Dokumen14 halamanFieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Xa MauBelum ada peringkat
- High Tech AalbersDokumen12 halamanHigh Tech AalbersXa MauBelum ada peringkat
- Power Management Control of Electrical Propulsion SystemDokumen26 halamanPower Management Control of Electrical Propulsion Systemdimitaring100% (1)
- Abstract Power LauvdalDokumen1 halamanAbstract Power LauvdalXa MauBelum ada peringkat
- Alspa C80-35 DatasheetsDokumen344 halamanAlspa C80-35 DatasheetsStanislav Hock100% (1)
- Wideband Fusion LBL and Usbl: Construction Survey Positioning SystemsDokumen12 halamanWideband Fusion LBL and Usbl: Construction Survey Positioning SystemsXa MauBelum ada peringkat
- Fieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Dokumen14 halamanFieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Xa MauBelum ada peringkat
- Fieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Dokumen14 halamanFieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Xa MauBelum ada peringkat
- Lat LongDokumen24 halamanLat LongXa MauBelum ada peringkat
- +/-10v Isolated Analog Input Module: Product Specifications and Installation DataDokumen4 halaman+/-10v Isolated Analog Input Module: Product Specifications and Installation DataXa MauBelum ada peringkat
- Datasheet: Compatt Flotation CollarDokumen2 halamanDatasheet: Compatt Flotation CollarXa MauBelum ada peringkat
- Catalog C60H-DCDokumen6 halamanCatalog C60H-DCNae MocioiBelum ada peringkat
- Open Book API 510 Practice Exam B Do Not Mark On Your Exam, Use The Answer Sheets ProvidedDokumen16 halamanOpen Book API 510 Practice Exam B Do Not Mark On Your Exam, Use The Answer Sheets ProvidedBeantickBelum ada peringkat
- Infopack 2016 enDokumen44 halamanInfopack 2016 enAlbertoBelum ada peringkat
- (Pasig) Certificate of OccupancyDokumen12 halaman(Pasig) Certificate of OccupancyAndrew MarasiganBelum ada peringkat
- Material Characterization of Sugarcane Bagasseepoxy Composites For - 2022Dokumen5 halamanMaterial Characterization of Sugarcane Bagasseepoxy Composites For - 2022bakhrul ilmiBelum ada peringkat
- Babies of 2010Dokumen16 halamanBabies of 2010Sierra Nevada Media GroupBelum ada peringkat
- Synopsis of Power FactorDokumen10 halamanSynopsis of Power FactorRavi TiwariBelum ada peringkat
- Comparison of IEC IP and UL/NEMA TYPE Ratings: ControlsDokumen1 halamanComparison of IEC IP and UL/NEMA TYPE Ratings: ControlsEdwin LinBelum ada peringkat
- Pipe Color CodeDokumen1 halamanPipe Color CodePatricia de los SantosBelum ada peringkat
- B.tech Regular Examination Fee Registration FormDokumen1 halamanB.tech Regular Examination Fee Registration FormvishwasBelum ada peringkat
- Risk Assess T-17 - Using Portable Hand ToolsDokumen4 halamanRisk Assess T-17 - Using Portable Hand ToolsMAB AliBelum ada peringkat
- Harbor GlenDokumen31 halamanHarbor GlenElvis Felix fernandesBelum ada peringkat
- C#.Net Interview Questions and AnswersDokumen11 halamanC#.Net Interview Questions and AnswersManoj ManuBelum ada peringkat
- lm230wf1 Tla6Dokumen32 halamanlm230wf1 Tla6Charlie SierraBelum ada peringkat
- A Interview QuestionsDokumen363 halamanA Interview QuestionsJaishankar RenganathanBelum ada peringkat
- Production Support ProcessDokumen15 halamanProduction Support ProcesssantoshBelum ada peringkat
- BEP Pages 5 16Dokumen12 halamanBEP Pages 5 16Amy LauBelum ada peringkat
- CAG Report On Antrix-Devas DealDokumen76 halamanCAG Report On Antrix-Devas DealCanary Trap100% (1)
- Formulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film FormerDokumen11 halamanFormulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film Formersunaina agarwalBelum ada peringkat
- Foaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingDokumen27 halamanFoaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingArshad SiddiqueeBelum ada peringkat
- Spirent TestCenter Automation Obj RefDokumen3.210 halamanSpirent TestCenter Automation Obj Refokie11Belum ada peringkat
- Didsn1811a (Skyair R-410a)Dokumen12 halamanDidsn1811a (Skyair R-410a)Ari SetyawanBelum ada peringkat
- 2013 OSPE Salary Survey PDFDokumen20 halaman2013 OSPE Salary Survey PDFdarinscottjohnsonBelum ada peringkat
- Upload Photosimages Into Custom Table & Print in Adobe FormDokumen14 halamanUpload Photosimages Into Custom Table & Print in Adobe FormEmilSBelum ada peringkat
- Investigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowDokumen252 halamanInvestigating The Effect of Liquid Viscosity On Two Phase Gas Liquid FlowAnonymous DMh6pdl0aBelum ada peringkat
- Welding Procedure Specification: Material / Joints QualifiedDokumen2 halamanWelding Procedure Specification: Material / Joints QualifiedFernando LlontopBelum ada peringkat
- Uk Fat 2017Dokumen178 halamanUk Fat 2017Christopher J MillsBelum ada peringkat
- Steering Wheel Slip - Check: Pruebas y AjustesDokumen2 halamanSteering Wheel Slip - Check: Pruebas y AjustesLENIN JHAIR VALDERRAMA SEGURABelum ada peringkat